 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeritability in Morphological Robot Evolution
Oct 21, 2021
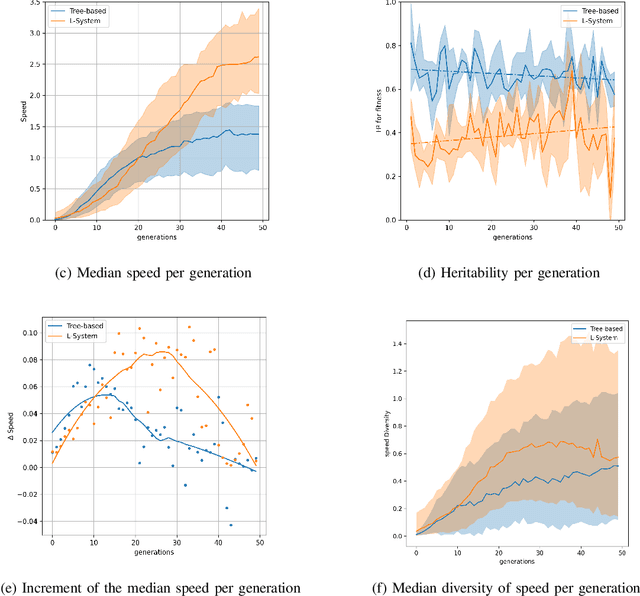
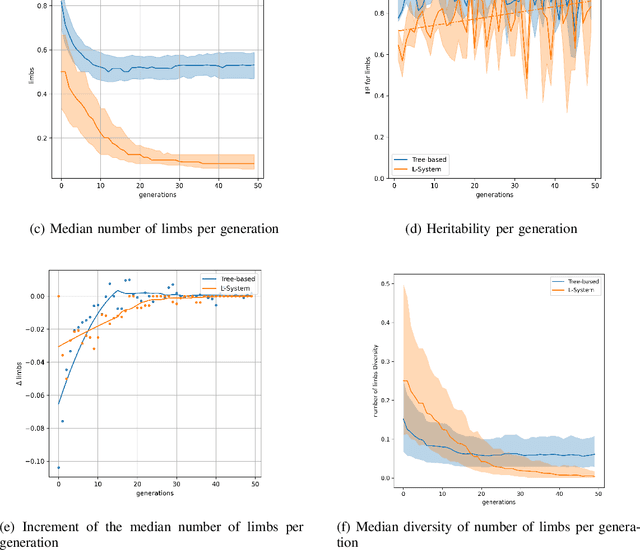
In the field of evolutionary robotics, choosing the correct encoding is very complicated, especially when robots evolve both behaviours and morphologies at the same time. With the objective of improving our understanding of the mapping process from encodings to functional robots, we introduce the biological notion of heritability, which captures the amount of phenotypic variation caused by genotypic variation. In our analysis we measure the heritability on the first generation of robots evolved from two different encodings, a direct encoding and an indirect encoding. In addition we investigate the interplay between heritability and phenotypic diversity through the course of an entire evolutionary process. In particular, we investigate how direct and indirect genotypes can exhibit preferences for exploration or exploitation throughout the course of evolution. We observe how an exploration or exploitation tradeoff can be more easily understood by examining patterns in heritability and phenotypic diversity. In conclusion, we show how heritability can be a useful tool to better understand the relationship between genotypes and phenotypes, especially helpful when designing more complicated systems where complex individuals and environments can adapt and influence each other.
Impact of Energy Efficiency on the Morphology and Behaviour of Evolved Robots
Jul 12, 2021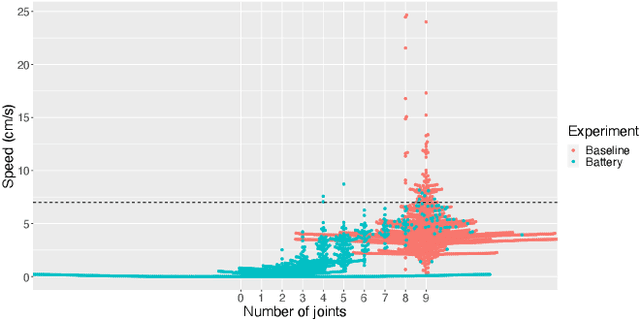

Most evolutionary robotics studies focus on evolving some targeted behavior without taking the energy usage into account. This limits the practical value of such systems because energy efficiency is an important property for real-world autonomous robots. In this paper, we mitigate this problem by extending our simulator with a battery model and taking energy consumption into account during fitness evaluations. Using this system we investigate how energy awareness affects the evolution of robots. Since our system is to evolve morphologies as well as controllers, the main research question is twofold: (i) what is the impact on the morphologies of the evolved robots, and (ii) what is the impact on the behavior of the evolved robots if energy consumption is included in the fitness evaluation? The results show that including the energy consumption in the fitness in a multi-objective fashion (by NSGA-II) reduces the average size of robot bodies while at the same time reducing their speed. However, robots generated without size reduction can achieve speeds comparable to robots from the baseline set.