 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeE-SocialNav: Efficient Socially Compliant Navigation with Language Models
Mar 21, 2026Language models (LMs) are increasingly applied to robotic navigation; however, existing benchmarks primarily emphasize navigation success rates while paying limited attention to social compliance. Moreover, relying on large-scale LMs can raise efficiency concerns, as their heavy computational overhead leads to slower response times and higher energy consumption, making them impractical for real-time deployment on resource-constrained robotic platforms. In this work, we evaluate the social compliance of GPT-4o and Claude in robotic navigation and propose E-SocialNav, an efficient LM designed for socially compliant navigation. Despite being trained on a relatively small dataset, E-SocialNav consistently outperforms zero-shot baselines in generating socially compliant behaviors. By employing a two-stage training pipeline consisting of supervised fine-tuning followed by direct preference optimization, E-SocialNav achieves strong performance in both text-level semantic similarity to human annotations and action accuracy. The source code is available at https://github.com/Dr-LingXiao/ESocialNav.
Legs Over Arms: On the Predictive Value of Lower-Body Pose for Human Trajectory Prediction from Egocentric Robot Perception
Feb 09, 2026Predicting human trajectory is crucial for social robot navigation in crowded environments. While most existing approaches treat human as point mass, we present a study on multi-agent trajectory prediction that leverages different human skeletal features for improved forecast accuracy. In particular, we systematically evaluate the predictive utility of 2D and 3D skeletal keypoints and derived biomechanical cues as additional inputs. Through a comprehensive study on the JRDB dataset and another new dataset for social navigation with 360-degree panoramic videos, we find that focusing on lower-body 3D keypoints yields a 13% reduction in Average Displacement Error and augmenting 3D keypoint inputs with corresponding biomechanical cues provides a further 1-4% improvement. Notably, the performance gain persists when using 2D keypoint inputs extracted from equirectangular panoramic images, indicating that monocular surround vision can capture informative cues for motion forecasting. Our finding that robots can forecast human movement efficiently by watching their legs provides actionable insights for designing sensing capabilities for social robot navigation.
MAction-SocialNav: Multi-Action Socially Compliant Navigation via Reasoning-enhanced Prompt Tuning
Dec 25, 2025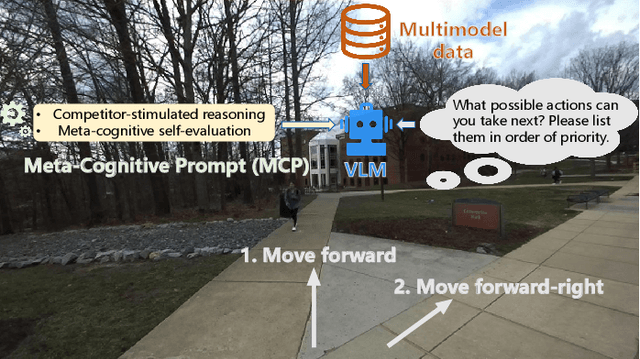
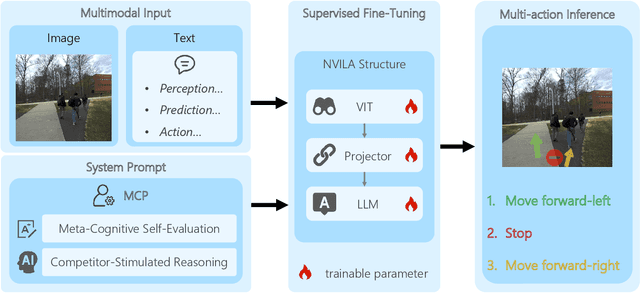
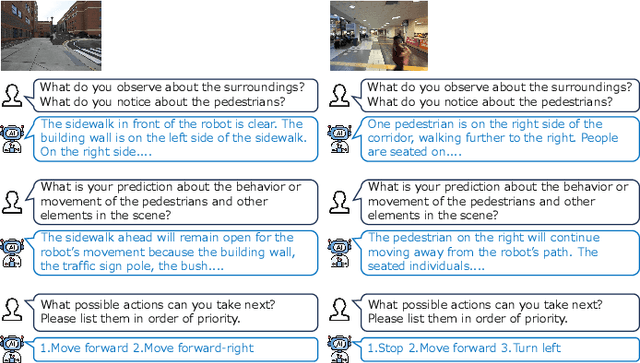
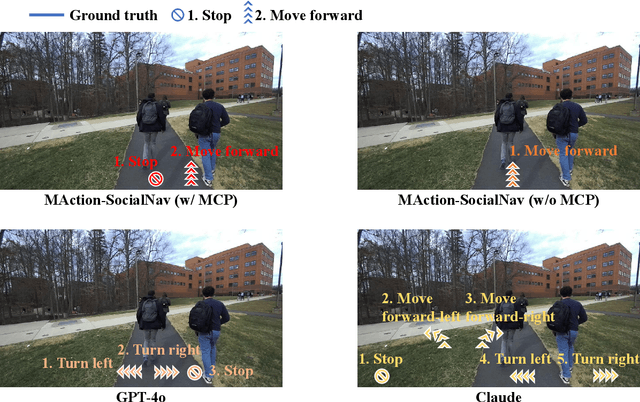
Socially compliant navigation requires robots to move safely and appropriately in human-centered environments by respecting social norms. However, social norms are often ambiguous, and in a single scenario, multiple actions may be equally acceptable. Most existing methods simplify this problem by assuming a single correct action, which limits their ability to handle real-world social uncertainty. In this work, we propose MAction-SocialNav, an efficient vision language model for socially compliant navigation that explicitly addresses action ambiguity, enabling generating multiple plausible actions within one scenario. To enhance the model's reasoning capability, we introduce a novel meta-cognitive prompt (MCP) method. Furthermore, to evaluate the proposed method, we curate a multi-action socially compliant navigation dataset that accounts for diverse conditions, including crowd density, indoor and outdoor environments, and dual human annotations. The dataset contains 789 samples, each with three-turn conversation, split into 710 training samples and 79 test samples through random selection. We also design five evaluation metrics to assess high-level decision precision, safety, and diversity. Extensive experiments demonstrate that the proposed MAction-SocialNav achieves strong social reasoning performance while maintaining high efficiency, highlighting its potential for real-world human robot navigation. Compared with zero-shot GPT-4o and Claude, our model achieves substantially higher decision quality (APG: 0.595 vs. 0.000/0.025) and safety alignment (ER: 0.264 vs. 0.642/0.668), while maintaining real-time efficiency (1.524 FPS, over 3x faster).
Verti-Arena: A Controllable and Standardized Indoor Testbed for Multi-Terrain Off-Road Autonomy
Aug 11, 2025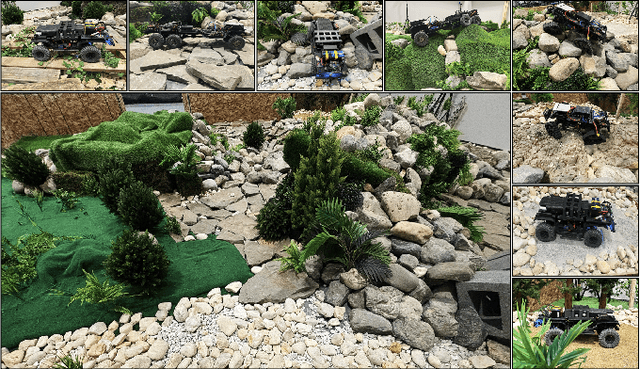
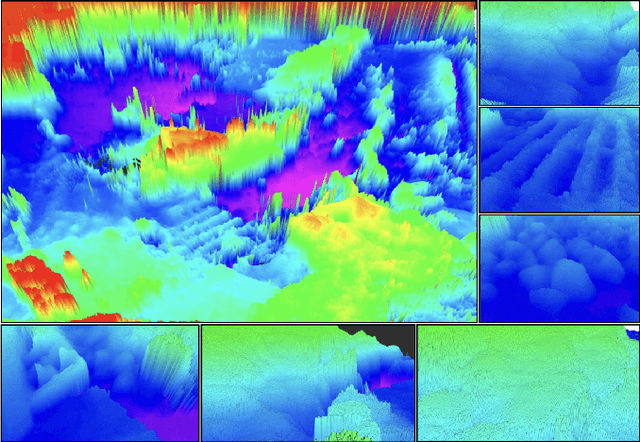
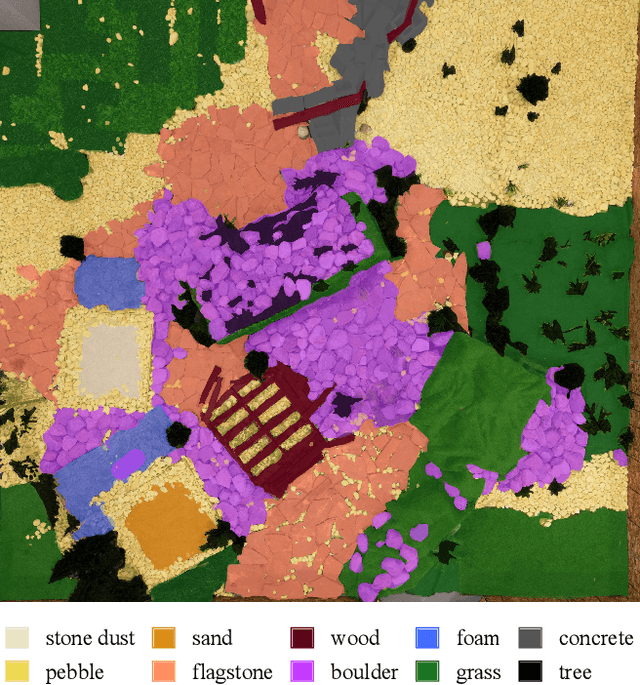
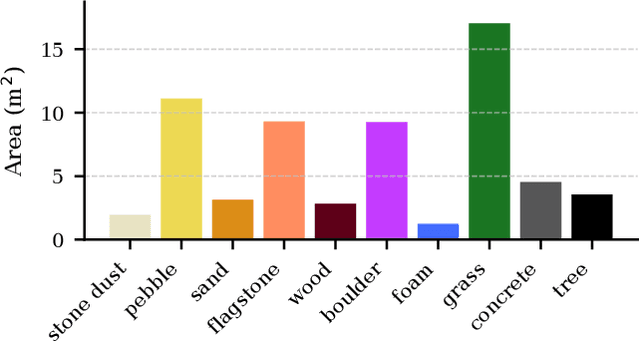
Off-road navigation is an important capability for mobile robots deployed in environments that are inaccessible or dangerous to humans, such as disaster response or planetary exploration. Progress is limited due to the lack of a controllable and standardized real-world testbed for systematic data collection and validation. To fill this gap, we introduce Verti-Arena, a reconfigurable indoor facility designed specifically for off-road autonomy. By providing a repeatable benchmark environment, Verti-Arena supports reproducible experiments across a variety of vertically challenging terrains and provides precise ground truth measurements through onboard sensors and a motion capture system. Verti-Arena also supports consistent data collection and comparative evaluation of algorithms in off-road autonomy research. We also develop a web-based interface that enables research groups worldwide to remotely conduct standardized off-road autonomy experiments on Verti-Arena.
Narrate2Nav: Real-Time Visual Navigation with Implicit Language Reasoning in Human-Centric Environments
Jun 17, 2025



Large Vision-Language Models (VLMs) have demonstrated potential in enhancing mobile robot navigation in human-centric environments by understanding contextual cues, human intentions, and social dynamics while exhibiting reasoning capabilities. However, their computational complexity and limited sensitivity to continuous numerical data impede real-time performance and precise motion control. To this end, we propose Narrate2Nav, a novel real-time vision-action model that leverages a novel self-supervised learning framework based on the Barlow Twins redundancy reduction loss to embed implicit natural language reasoning, social cues, and human intentions within a visual encoder-enabling reasoning in the model's latent space rather than token space. The model combines RGB inputs, motion commands, and textual signals of scene context during training to bridge from robot observations to low-level motion commands for short-horizon point-goal navigation during deployment. Extensive evaluation of Narrate2Nav across various challenging scenarios in both offline unseen dataset and real-world experiments demonstrates an overall improvement of 52.94 percent and 41.67 percent, respectively, over the next best baseline. Additionally, qualitative comparative analysis of Narrate2Nav's visual encoder attention map against four other baselines demonstrates enhanced attention to navigation-critical scene elements, underscoring its effectiveness in human-centric navigation tasks.
AutoSpatial: Visual-Language Reasoning for Social Robot Navigation through Efficient Spatial Reasoning Learning
Mar 10, 2025We present a novel method, AutoSpatial, an efficient approach with structured spatial grounding to enhance VLMs' spatial reasoning. By combining minimal manual supervision with large-scale Visual Question-Answering (VQA) pairs auto-labeling, our approach tackles the challenge of VLMs' limited spatial understanding in social navigation tasks. By applying a hierarchical two-round VQA strategy during training, AutoSpatial achieves both global and detailed understanding of scenarios, demonstrating more accurate spatial perception, movement prediction, Chain of Thought (CoT) reasoning, final action, and explanation compared to other SOTA approaches. These five components are essential for comprehensive social navigation reasoning. Our approach was evaluated using both expert systems (GPT-4o, Gemini 2.0 Flash, and Claude 3.5 Sonnet) that provided cross-validation scores and human evaluators who assigned relative rankings to compare model performances across four key aspects. Augmented by the enhanced spatial reasoning capabilities, AutoSpatial demonstrates substantial improvements by averaged cross-validation score from expert systems in: perception & prediction (up to 10.71%), reasoning (up to 16.26%), action (up to 20.50%), and explanation (up to 18.73%) compared to baseline models trained only on manually annotated data.
GND: Global Navigation Dataset with Multi-Modal Perception and Multi-Category Traversability in Outdoor Campus Environments
Sep 21, 2024



Navigating large-scale outdoor environments requires complex reasoning in terms of geometric structures, environmental semantics, and terrain characteristics, which are typically captured by onboard sensors such as LiDAR and cameras. While current mobile robots can navigate such environments using pre-defined, high-precision maps based on hand-crafted rules catered for the specific environment, they lack commonsense reasoning capabilities that most humans possess when navigating unknown outdoor spaces. To address this gap, we introduce the Global Navigation Dataset (GND), a large-scale dataset that integrates multi-modal sensory data, including 3D LiDAR point clouds and RGB and 360-degree images, as well as multi-category traversability maps (pedestrian walkways, vehicle roadways, stairs, off-road terrain, and obstacles) from ten university campuses. These environments encompass a variety of parks, urban settings, elevation changes, and campus layouts of different scales. The dataset covers approximately 2.7km2 and includes at least 350 buildings in total. We also present a set of novel applications of GND to showcase its utility to enable global robot navigation, such as map-based global navigation, mapless navigation, and global place recognition.
TGS: Trajectory Generation and Selection using Vision Language Models in Mapless Outdoor Environments
Aug 07, 2024



We present a multi-modal trajectory generation and selection algorithm for real-world mapless outdoor navigation in challenging scenarios with unstructured off-road features like buildings, grass, and curbs. Our goal is to compute suitable trajectories that (1) satisfy the environment-specific traversability constraints and (2) generate human-like paths while navigating in crosswalks, sidewalks, etc. Our formulation uses a Conditional Variational Autoencoder (CVAE) generative model enhanced with traversability constraints to generate multiple candidate trajectories for global navigation. We use VLMs and a visual prompting approach with their zero-shot ability of semantic understanding and logical reasoning to choose the best trajectory given the contextual information about the task. We evaluate our methods in various outdoor scenes with wheeled robots and compare the performance with other global navigation algorithms. In practice, we observe at least 3.35% improvement in traversability and 20.61% improvement in terms of human-like navigation in generated trajectories in challenging outdoor navigation scenarios.
AGL-NET: Aerial-Ground Cross-Modal Global Localization with Varying Scales
Apr 04, 2024



We present AGL-NET, a novel learning-based method for global localization using LiDAR point clouds and satellite maps. AGL-NET tackles two critical challenges: bridging the representation gap between image and points modalities for robust feature matching, and handling inherent scale discrepancies between global view and local view. To address these challenges, AGL-NET leverages a unified network architecture with a novel two-stage matching design. The first stage extracts informative neural features directly from raw sensor data and performs initial feature matching. The second stage refines this matching process by extracting informative skeleton features and incorporating a novel scale alignment step to rectify scale variations between LiDAR and map data. Furthermore, a novel scale and skeleton loss function guides the network toward learning scale-invariant feature representations, eliminating the need for pre-processing satellite maps. This significantly improves real-world applicability in scenarios with unknown map scales. To facilitate rigorous performance evaluation, we introduce a meticulously designed dataset within the CARLA simulator specifically tailored for metric localization training and assessment. The code and dataset will be made publicly available.
Socially Aware Robot Navigation through Scoring Using Vision-Language Models
Mar 30, 2024We propose VLM-Social-Nav, a novel Vision-Language Model (VLM) based navigation approach to compute a robot's trajectory in human-centered environments. Our goal is to make real-time decisions on robot actions that are socially compliant with human expectations. We utilize a perception model to detect important social entities and prompt a VLM to generate guidance for socially compliant robot behavior. VLM-Social-Nav uses a VLM-based scoring module that computes a cost term that ensures socially appropriate and effective robot actions generated by the underlying planner. Our overall approach reduces reliance on large datasets (for training) and enhances adaptability in decision-making. In practice, it results in improved socially compliant navigation in human-shared environments. We demonstrate and evaluate our system in four different real-world social navigation scenarios with a Turtlebot robot. We observe at least 36.37% improvement in average success rate and 20.00% improvement in average collision rate in the four social navigation scenarios. The user study score shows that VLM-Social-Nav generates the most socially compliant navigation behavior.