 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtremControl: Low-Latency Humanoid Teleoperation with Direct Extremity Control
Feb 11, 2026Building a low-latency humanoid teleoperation system is essential for collecting diverse reactive and dynamic demonstrations. However, existing approaches rely on heavily pre-processed human-to-humanoid motion retargeting and position-only PD control, resulting in substantial latency that severely limits responsiveness and prevents tasks requiring rapid feedback and fast reactions. To address this problem, we propose ExtremControl, a low latency whole-body control framework that: (1) operates directly on SE(3) poses of selected rigid links, primarily humanoid extremities, to avoid full-body retargeting; (2) utilizes a Cartesian-space mapping to directly convert human motion to humanoid link targets; and (3) incorporates velocity feedforward control at low level to support highly responsive behavior under rapidly changing control interfaces. We further provide a unified theoretical formulation of ExtremControl and systematically validate its effectiveness through experiments in both simulation and real-world environments. Building on ExtremControl, we implement a low-latency humanoid teleoperation system that supports both optical motion capture and VR-based motion tracking, achieving end-to-end latency as low as 50ms and enabling highly responsive behaviors such as ping-pong ball balancing, juggling, and real-time return, thereby substantially surpassing the 200ms latency limit observed in prior work.
DAVE: Diverse Atomic Visual Elements Dataset with High Representation of Vulnerable Road Users in Complex and Unpredictable Environments
Dec 28, 2024



Most existing traffic video datasets including Waymo are structured, focusing predominantly on Western traffic, which hinders global applicability. Specifically, most Asian scenarios are far more complex, involving numerous objects with distinct motions and behaviors. Addressing this gap, we present a new dataset, DAVE, designed for evaluating perception methods with high representation of Vulnerable Road Users (VRUs: e.g. pedestrians, animals, motorbikes, and bicycles) in complex and unpredictable environments. DAVE is a manually annotated dataset encompassing 16 diverse actor categories (spanning animals, humans, vehicles, etc.) and 16 action types (complex and rare cases like cut-ins, zigzag movement, U-turn, etc.), which require high reasoning ability. DAVE densely annotates over 13 million bounding boxes (bboxes) actors with identification, and more than 1.6 million boxes are annotated with both actor identification and action/behavior details. The videos within DAVE are collected based on a broad spectrum of factors, such as weather conditions, the time of day, road scenarios, and traffic density. DAVE can benchmark video tasks like Tracking, Detection, Spatiotemporal Action Localization, Language-Visual Moment retrieval, and Multi-label Video Action Recognition. Given the critical importance of accurately identifying VRUs to prevent accidents and ensure road safety, in DAVE, vulnerable road users constitute 41.13% of instances, compared to 23.71% in Waymo. DAVE provides an invaluable resource for the development of more sensitive and accurate visual perception algorithms in the complex real world. Our experiments show that existing methods suffer degradation in performance when evaluated on DAVE, highlighting its benefit for future video recognition research.
Syllabus: Portable Curricula for Reinforcement Learning Agents
Nov 18, 2024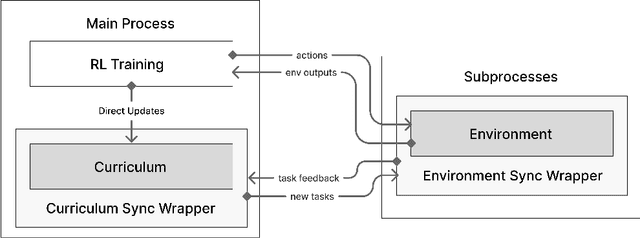


Curriculum learning has been a quiet yet crucial component of many of the high-profile successes of reinforcement learning. Despite this, none of the major reinforcement learning libraries directly support curriculum learning or include curriculum learning implementations. These methods can improve the capabilities and robustness of RL agents, but often require significant, complex changes to agent training code. We introduce Syllabus, a library for training RL agents with curriculum learning, as a solution to this problem. Syllabus provides a universal API for curriculum learning algorithms, implementations of popular curriculum learning methods, and infrastructure for easily integrating them with distributed training code written in nearly any RL library. Syllabus provides a minimal API for each of the core components of curriculum learning, dramatically simplifying the process of designing new algorithms and applying existing algorithms to new environments. We demonstrate that the same Syllabus code can be used to train agents written in multiple different RL libraries on numerous domains. In doing so, we present the first examples of curriculum learning in NetHack and Neural MMO, two of the premier challenges for single-agent and multi-agent RL respectively, achieving strong results compared to state of the art baselines.