 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNemotron ColEmbed V2: Top-Performing Late Interaction embedding models for Visual Document Retrieval
Feb 03, 2026Retrieval-Augmented Generation (RAG) systems have been popular for generative applications, powering language models by injecting external knowledge. Companies have been trying to leverage their large catalog of documents (e.g. PDFs, presentation slides) in such RAG pipelines, whose first step is the retrieval component. Dense retrieval has been a popular approach, where embedding models are used to generate a dense representation of the user query that is closer to relevant content embeddings. More recently, VLM-based embedding models have become popular for visual document retrieval, as they preserve visual information and simplify the indexing pipeline compared to OCR text extraction. Motivated by the growing demand for visual document retrieval, we introduce Nemotron ColEmbed V2, a family of models that achieve state-of-the-art performance on the ViDoRe benchmarks. We release three variants - with 3B, 4B, and 8B parameters - based on pre-trained VLMs: NVIDIA Eagle 2 with Llama 3.2 3B backbone, Qwen3-VL-4B-Instruct and Qwen3-VL-8B-Instruct, respectively. The 8B model ranks first on the ViDoRe V3 leaderboard as of February 03, 2026, achieving an average NDCG@10 of 63.42. We describe the main techniques used across data processing, training, and post-training - such as cluster-based sampling, hard-negative mining, bidirectional attention, late interaction, and model merging - that helped us build our top-performing models. We also discuss compute and storage engineering challenges posed by the late interaction mechanism and present experiments on how to balance accuracy and storage with lower dimension embeddings.
OpenVision 3: A Family of Unified Visual Encoder for Both Understanding and Generation
Jan 21, 2026This paper presents a family of advanced vision encoder, named OpenVision 3, that learns a single, unified visual representation that can serve both image understanding and image generation. Our core architecture is simple: we feed VAE-compressed image latents to a ViT encoder and train its output to support two complementary roles. First, the encoder output is passed to the ViT-VAE decoder to reconstruct the original image, encouraging the representation to capture generative structure. Second, the same representation is optimized with contrastive learning and image-captioning objectives, strengthening semantic features. By jointly optimizing reconstruction- and semantics-driven signals in a shared latent space, the encoder learns representations that synergize and generalize well across both regimes. We validate this unified design through extensive downstream evaluations with the encoder frozen. For multimodal understanding, we plug the encoder into the LLaVA-1.5 framework: it performs comparably with a standard CLIP vision encoder (e.g., 62.4 vs 62.2 on SeedBench, and 83.7 vs 82.9 on POPE). For generation, we test it under the RAE framework: ours substantially surpasses the standard CLIP-based encoder (e.g., gFID: 1.89 vs 2.54 on ImageNet). We hope this work can spur future research on unified modeling.
Fast-ThinkAct: Efficient Vision-Language-Action Reasoning via Verbalizable Latent Planning
Jan 14, 2026Vision-Language-Action (VLA) tasks require reasoning over complex visual scenes and executing adaptive actions in dynamic environments. While recent studies on reasoning VLAs show that explicit chain-of-thought (CoT) can improve generalization, they suffer from high inference latency due to lengthy reasoning traces. We propose Fast-ThinkAct, an efficient reasoning framework that achieves compact yet performant planning through verbalizable latent reasoning. Fast-ThinkAct learns to reason efficiently with latent CoTs by distilling from a teacher, driven by a preference-guided objective to align manipulation trajectories that transfers both linguistic and visual planning capabilities for embodied control. This enables reasoning-enhanced policy learning that effectively connects compact reasoning to action execution. Extensive experiments across diverse embodied manipulation and reasoning benchmarks demonstrate that Fast-ThinkAct achieves strong performance with up to 89.3\% reduced inference latency over state-of-the-art reasoning VLAs, while maintaining effective long-horizon planning, few-shot adaptation, and failure recovery.
NVIDIA Nemotron Nano V2 VL
Nov 07, 2025We introduce Nemotron Nano V2 VL, the latest model of the Nemotron vision-language series designed for strong real-world document understanding, long video comprehension, and reasoning tasks. Nemotron Nano V2 VL delivers significant improvements over our previous model, Llama-3.1-Nemotron-Nano-VL-8B, across all vision and text domains through major enhancements in model architecture, datasets, and training recipes. Nemotron Nano V2 VL builds on Nemotron Nano V2, a hybrid Mamba-Transformer LLM, and innovative token reduction techniques to achieve higher inference throughput in long document and video scenarios. We are releasing model checkpoints in BF16, FP8, and FP4 formats and sharing large parts of our datasets, recipes and training code.
VideoITG: Multimodal Video Understanding with Instructed Temporal Grounding
Jul 17, 2025Recent studies have revealed that selecting informative and relevant video frames can significantly improve the performance of Video Large Language Models (Video-LLMs). Current methods, such as reducing inter-frame redundancy, employing separate models for image-text relevance assessment, or utilizing temporal video grounding for event localization, substantially adopt unsupervised learning paradigms, whereas they struggle to address the complex scenarios in long video understanding. We propose Instructed Temporal Grounding for Videos (VideoITG), featuring customized frame sampling aligned with user instructions. The core of VideoITG is the VidThinker pipeline, an automated annotation framework that explicitly mimics the human annotation process. First, it generates detailed clip-level captions conditioned on the instruction; then, it retrieves relevant video segments through instruction-guided reasoning; finally, it performs fine-grained frame selection to pinpoint the most informative visual evidence. Leveraging VidThinker, we construct the VideoITG-40K dataset, containing 40K videos and 500K instructed temporal grounding annotations. We then design a plug-and-play VideoITG model, which takes advantage of visual language alignment and reasoning capabilities of Video-LLMs, for effective frame selection in a discriminative manner. Coupled with Video-LLMs, VideoITG achieves consistent performance improvements across multiple multimodal video understanding benchmarks, showing its superiority and great potentials for video understanding.
Argus: Vision-Centric Reasoning with Grounded Chain-of-Thought
May 29, 2025Recent advances in multimodal large language models (MLLMs) have demonstrated remarkable capabilities in vision-language tasks, yet they often struggle with vision-centric scenarios where precise visual focus is needed for accurate reasoning. In this paper, we introduce Argus to address these limitations with a new visual attention grounding mechanism. Our approach employs object-centric grounding as visual chain-of-thought signals, enabling more effective goal-conditioned visual attention during multimodal reasoning tasks. Evaluations on diverse benchmarks demonstrate that Argus excels in both multimodal reasoning tasks and referring object grounding tasks. Extensive analysis further validates various design choices of Argus, and reveals the effectiveness of explicit language-guided visual region-of-interest engagement in MLLMs, highlighting the importance of advancing multimodal intelligence from a visual-centric perspective. Project page: https://yunzeman.github.io/argus/
Nemotron-Research-Tool-N1: Tool-Using Language Models with Reinforced Reasoning
Apr 25, 2025Enabling large language models with external tools has become a pivotal strategy for extending their functionality beyond text generation tasks. Prior work typically enhances tool-use abilities by either applying supervised fine-tuning (SFT) to enforce tool-call correctness or distilling reasoning traces from stronger models for SFT. However, both approaches fall short, either omitting reasoning entirely or producing imitative reasoning that limits generalization. Inspired by the success of DeepSeek-R1 in eliciting reasoning through rule-based reinforcement learning, we develop the Nemotron-Research-Tool-N1 series of tool-using language models using a similar training paradigm. Instead of restrictively supervising intermediate reasoning traces distilled from stronger models, Nemotron-Research-Tool-N1 is optimized with a binary reward that evaluates only the structural validity and functional correctness of tool invocations. This lightweight supervision allows the model to autonomously internalize reasoning strategies, without the need for annotated reasoning trajectories. Experiments on the BFCL and API-Bank benchmarks show that Nemotron-Research-Tool-N1-7B and Nemotron-Research-Tool-N1-14B, built on Qwen-2.5-7B/14B-Instruct, achieve state-of-the-art results, outperforming GPT-4o on both evaluations.
FRAG: Frame Selection Augmented Generation for Long Video and Long Document Understanding
Apr 24, 2025



There has been impressive progress in Large Multimodal Models (LMMs). Recent works extend these models to long inputs, including multi-page documents and long videos. However, the model size and performance of these long context models are still limited due to the computational cost in both training and inference. In this work, we explore an orthogonal direction and process long inputs without long context LMMs. We propose Frame Selection Augmented Generation (FRAG), where the model first selects relevant frames within the input, and then only generates the final outputs based on the selected frames. The core of the selection process is done by scoring each frame independently, which does not require long context processing. The frames with the highest scores are then selected by a simple Top-K selection. We show that this frustratingly simple framework is applicable to both long videos and multi-page documents using existing LMMs without any fine-tuning. We consider two models, LLaVA-OneVision and InternVL2, in our experiments and show that FRAG consistently improves the performance and achieves state-of-the-art performances for both long video and long document understanding. For videos, FRAG substantially improves InternVL2-76B by 5.8% on MLVU and 3.7% on Video-MME. For documents, FRAG achieves over 20% improvements on MP-DocVQA compared with recent LMMs specialized in long document understanding. Code is available at: https://github.com/NVlabs/FRAG
Eagle 2.5: Boosting Long-Context Post-Training for Frontier Vision-Language Models
Apr 21, 2025We introduce Eagle 2.5, a family of frontier vision-language models (VLMs) for long-context multimodal learning. Our work addresses the challenges in long video comprehension and high-resolution image understanding, introducing a generalist framework for both tasks. The proposed training framework incorporates Automatic Degrade Sampling and Image Area Preservation, two techniques that preserve contextual integrity and visual details. The framework also includes numerous efficiency optimizations in the pipeline for long-context data training. Finally, we propose Eagle-Video-110K, a novel dataset that integrates both story-level and clip-level annotations, facilitating long-video understanding. Eagle 2.5 demonstrates substantial improvements on long-context multimodal benchmarks, providing a robust solution to the limitations of existing VLMs. Notably, our best model Eagle 2.5-8B achieves 72.4% on Video-MME with 512 input frames, matching the results of top-tier commercial model such as GPT-4o and large-scale open-source models like Qwen2.5-VL-72B and InternVL2.5-78B.
Nemotron-H: A Family of Accurate and Efficient Hybrid Mamba-Transformer Models
Apr 10, 2025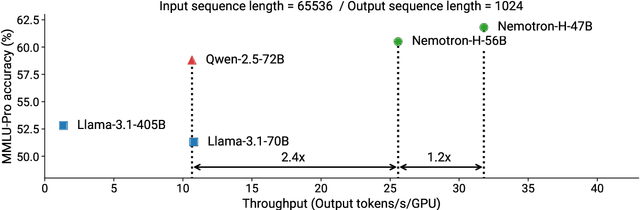

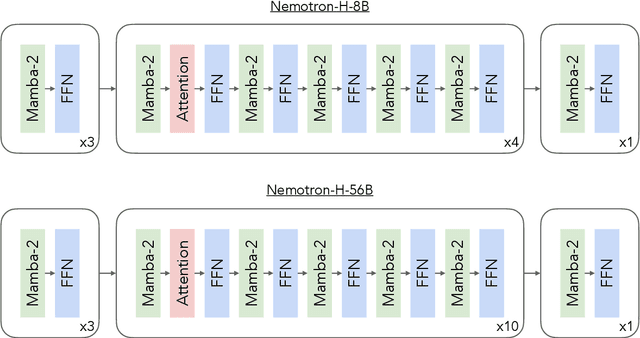
As inference-time scaling becomes critical for enhanced reasoning capabilities, it is increasingly becoming important to build models that are efficient to infer. We introduce Nemotron-H, a family of 8B and 56B/47B hybrid Mamba-Transformer models designed to reduce inference cost for a given accuracy level. To achieve this goal, we replace the majority of self-attention layers in the common Transformer model architecture with Mamba layers that perform constant computation and require constant memory per generated token. We show that Nemotron-H models offer either better or on-par accuracy compared to other similarly-sized state-of-the-art open-sourced Transformer models (e.g., Qwen-2.5-7B/72B and Llama-3.1-8B/70B), while being up to 3$\times$ faster at inference. To further increase inference speed and reduce the memory required at inference time, we created Nemotron-H-47B-Base from the 56B model using a new compression via pruning and distillation technique called MiniPuzzle. Nemotron-H-47B-Base achieves similar accuracy to the 56B model, but is 20% faster to infer. In addition, we introduce an FP8-based training recipe and show that it can achieve on par results with BF16-based training. This recipe is used to train the 56B model. All Nemotron-H models will be released, with support in Hugging Face, NeMo, and Megatron-LM.