 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgoScale: Scaling Dexterous Manipulation with Diverse Egocentric Human Data
Feb 18, 2026Human behavior is among the most scalable sources of data for learning physical intelligence, yet how to effectively leverage it for dexterous manipulation remains unclear. While prior work demonstrates human to robot transfer in constrained settings, it is unclear whether large scale human data can support fine grained, high degree of freedom dexterous manipulation. We present EgoScale, a human to dexterous manipulation transfer framework built on large scale egocentric human data. We train a Vision Language Action (VLA) model on over 20,854 hours of action labeled egocentric human video, more than 20 times larger than prior efforts, and uncover a log linear scaling law between human data scale and validation loss. This validation loss strongly correlates with downstream real robot performance, establishing large scale human data as a predictable supervision source. Beyond scale, we introduce a simple two stage transfer recipe: large scale human pretraining followed by lightweight aligned human robot mid training. This enables strong long horizon dexterous manipulation and one shot task adaptation with minimal robot supervision. Our final policy improves average success rate by 54% over a no pretraining baseline using a 22 DoF dexterous robotic hand, and transfers effectively to robots with lower DoF hands, indicating that large scale human motion provides a reusable, embodiment agnostic motor prior.
World Action Models are Zero-shot Policies
Feb 17, 2026State-of-the-art Vision-Language-Action (VLA) models excel at semantic generalization but struggle to generalize to unseen physical motions in novel environments. We introduce DreamZero, a World Action Model (WAM) built upon a pretrained video diffusion backbone. Unlike VLAs, WAMs learn physical dynamics by predicting future world states and actions, using video as a dense representation of how the world evolves. By jointly modeling video and action, DreamZero learns diverse skills effectively from heterogeneous robot data without relying on repetitive demonstrations. This results in over 2x improvement in generalization to new tasks and environments compared to state-of-the-art VLAs in real robot experiments. Crucially, through model and system optimizations, we enable a 14B autoregressive video diffusion model to perform real-time closed-loop control at 7Hz. Finally, we demonstrate two forms of cross-embodiment transfer: video-only demonstrations from other robots or humans yield a relative improvement of over 42% on unseen task performance with just 10-20 minutes of data. More surprisingly, DreamZero enables few-shot embodiment adaptation, transferring to a new embodiment with only 30 minutes of play data while retaining zero-shot generalization.
NitroGen: An Open Foundation Model for Generalist Gaming Agents
Jan 04, 2026We introduce NitroGen, a vision-action foundation model for generalist gaming agents that is trained on 40,000 hours of gameplay videos across more than 1,000 games. We incorporate three key ingredients: 1) an internet-scale video-action dataset constructed by automatically extracting player actions from publicly available gameplay videos, 2) a multi-game benchmark environment that can measure cross-game generalization, and 3) a unified vision-action model trained with large-scale behavior cloning. NitroGen exhibits strong competence across diverse domains, including combat encounters in 3D action games, high-precision control in 2D platformers, and exploration in procedurally generated worlds. It transfers effectively to unseen games, achieving up to 52% relative improvement in task success rates over models trained from scratch. We release the dataset, evaluation suite, and model weights to advance research on generalist embodied agents.
FLARE: Robot Learning with Implicit World Modeling
May 21, 2025We introduce $\textbf{F}$uture $\textbf{LA}$tent $\textbf{RE}$presentation Alignment ($\textbf{FLARE}$), a novel framework that integrates predictive latent world modeling into robot policy learning. By aligning features from a diffusion transformer with latent embeddings of future observations, $\textbf{FLARE}$ enables a diffusion transformer policy to anticipate latent representations of future observations, allowing it to reason about long-term consequences while generating actions. Remarkably lightweight, $\textbf{FLARE}$ requires only minimal architectural modifications -- adding a few tokens to standard vision-language-action (VLA) models -- yet delivers substantial performance gains. Across two challenging multitask simulation imitation learning benchmarks spanning single-arm and humanoid tabletop manipulation, $\textbf{FLARE}$ achieves state-of-the-art performance, outperforming prior policy learning baselines by up to 26%. Moreover, $\textbf{FLARE}$ unlocks the ability to co-train with human egocentric video demonstrations without action labels, significantly boosting policy generalization to a novel object with unseen geometry with as few as a single robot demonstration. Our results establish $\textbf{FLARE}$ as a general and scalable approach for combining implicit world modeling with high-frequency robotic control.
DreamGen: Unlocking Generalization in Robot Learning through Neural Trajectories
May 19, 2025We introduce DreamGen, a simple yet highly effective 4-stage pipeline for training robot policies that generalize across behaviors and environments through neural trajectories - synthetic robot data generated from video world models. DreamGen leverages state-of-the-art image-to-video generative models, adapting them to the target robot embodiment to produce photorealistic synthetic videos of familiar or novel tasks in diverse environments. Since these models generate only videos, we recover pseudo-action sequences using either a latent action model or an inverse-dynamics model (IDM). Despite its simplicity, DreamGen unlocks strong behavior and environment generalization: a humanoid robot can perform 22 new behaviors in both seen and unseen environments, while requiring teleoperation data from only a single pick-and-place task in one environment. To evaluate the pipeline systematically, we introduce DreamGen Bench, a video generation benchmark that shows a strong correlation between benchmark performance and downstream policy success. Our work establishes a promising new axis for scaling robot learning well beyond manual data collection.
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Mar 18, 2025General-purpose robots need a versatile body and an intelligent mind. Recent advancements in humanoid robots have shown great promise as a hardware platform for building generalist autonomy in the human world. A robot foundation model, trained on massive and diverse data sources, is essential for enabling the robots to reason about novel situations, robustly handle real-world variability, and rapidly learn new tasks. To this end, we introduce GR00T N1, an open foundation model for humanoid robots. GR00T N1 is a Vision-Language-Action (VLA) model with a dual-system architecture. The vision-language module (System 2) interprets the environment through vision and language instructions. The subsequent diffusion transformer module (System 1) generates fluid motor actions in real time. Both modules are tightly coupled and jointly trained end-to-end. We train GR00T N1 with a heterogeneous mixture of real-robot trajectories, human videos, and synthetically generated datasets. We show that our generalist robot model GR00T N1 outperforms the state-of-the-art imitation learning baselines on standard simulation benchmarks across multiple robot embodiments. Furthermore, we deploy our model on the Fourier GR-1 humanoid robot for language-conditioned bimanual manipulation tasks, achieving strong performance with high data efficiency.
Do Vision-Language Models Represent Space and How? Evaluating Spatial Frame of Reference Under Ambiguities
Oct 22, 2024Spatial expressions in situated communication can be ambiguous, as their meanings vary depending on the frames of reference (FoR) adopted by speakers and listeners. While spatial language understanding and reasoning by vision-language models (VLMs) have gained increasing attention, potential ambiguities in these models are still under-explored. To address this issue, we present the COnsistent Multilingual Frame Of Reference Test (COMFORT), an evaluation protocol to systematically assess the spatial reasoning capabilities of VLMs. We evaluate nine state-of-the-art VLMs using COMFORT. Despite showing some alignment with English conventions in resolving ambiguities, our experiments reveal significant shortcomings of VLMs: notably, the models (1) exhibit poor robustness and consistency, (2) lack the flexibility to accommodate multiple FoRs, and (3) fail to adhere to language-specific or culture-specific conventions in cross-lingual tests, as English tends to dominate other languages. With a growing effort to align vision-language models with human cognitive intuitions, we call for more attention to the ambiguous nature and cross-cultural diversity of spatial reasoning.
Efficient In-Context Learning in Vision-Language Models for Egocentric Videos
Nov 29, 2023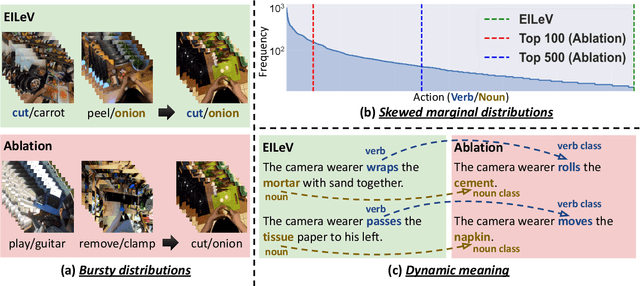
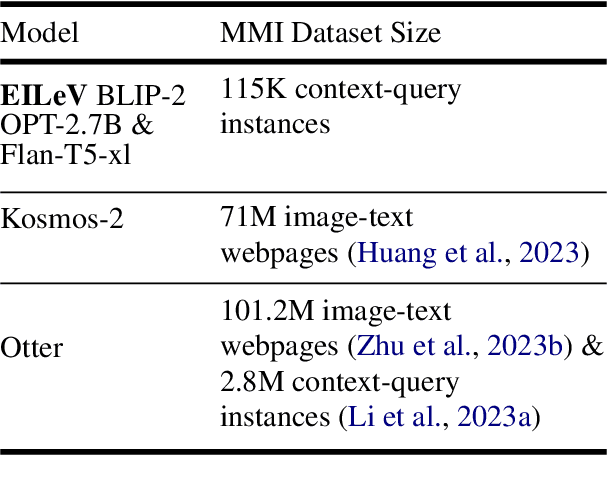
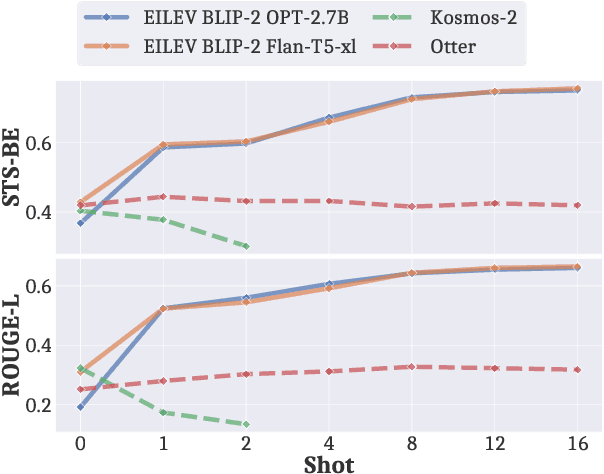
Recent advancements in text-only large language models (LLMs) have highlighted the benefit of in-context learning for adapting to new tasks with a few demonstrations. However, extending in-context learning to large vision-language models (VLMs) using a huge amount of naturalistic vision-language data has shown limited success, particularly for egocentric videos, due to high data collection costs. We propose a novel training method $\mathbb{E}$fficient $\mathbb{I}$n-context $\mathbb{L}$earning on $\mathbb{E}$gocentric $\mathbb{V}$ideos ($\mathbb{EILEV}$), which elicits in-context learning in VLMs for egocentric videos without requiring massive, naturalistic egocentric video datasets. $\mathbb{EILEV}$ involves architectural and training data adaptations to allow the model to process contexts interleaved with video clips and narrations, sampling of in-context examples with clusters of similar verbs and nouns, use of data with skewed marginal distributions with a long tail of infrequent verbs and nouns, as well as homonyms and synonyms. Our evaluations show that $\mathbb{EILEV}$-trained models outperform larger VLMs trained on a huge amount of naturalistic data in in-context learning. Furthermore, they can generalize to not only out-of-distribution, but also novel, rare egocentric videos and texts via in-context learning, demonstrating potential for applications requiring cost-effective training, and rapid post-deployment adaptability. Our code and demo are available at \url{https://github.com/yukw777/EILEV}.
From Heuristic to Analytic: Cognitively Motivated Strategies for Coherent Physical Commonsense Reasoning
Oct 24, 2023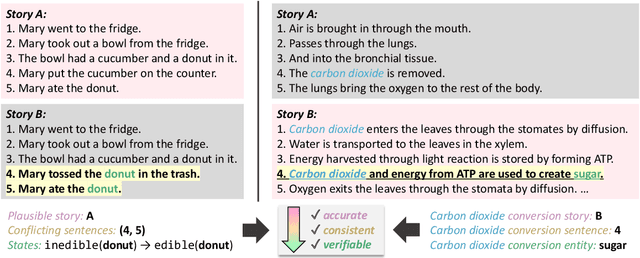
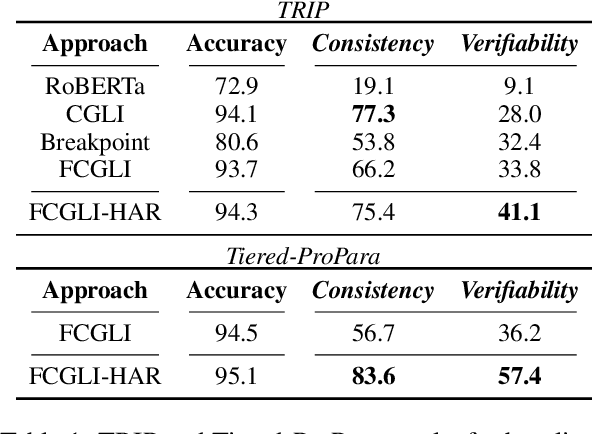
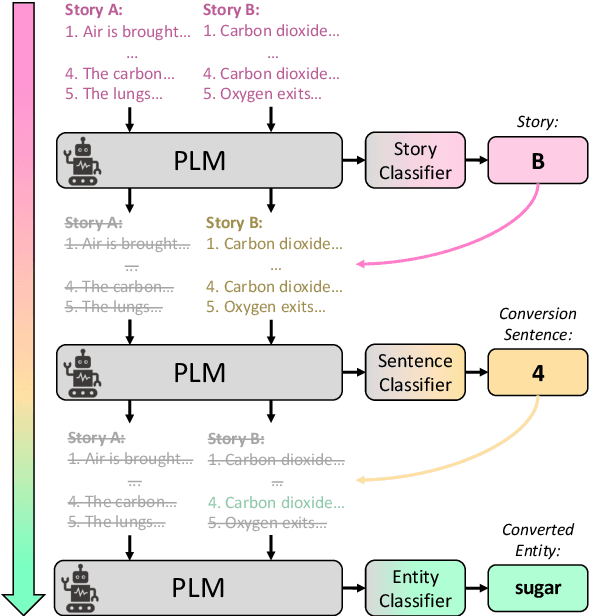
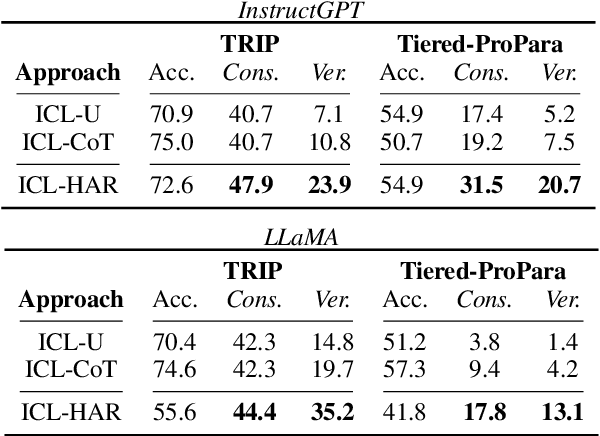
Pre-trained language models (PLMs) have shown impressive performance in various language tasks. However, they are prone to spurious correlations, and often generate illusory information. In real-world applications, PLMs should justify decisions with formalized, coherent reasoning chains, but this challenge remains under-explored. Cognitive psychology theorizes that humans are capable of utilizing fast and intuitive heuristic thinking to make decisions based on past experience, then rationalizing the decisions through slower and deliberative analytic reasoning. We incorporate these interlinked dual processes in fine-tuning and in-context learning with PLMs, applying them to two language understanding tasks that require coherent physical commonsense reasoning. We show that our proposed Heuristic-Analytic Reasoning (HAR) strategies drastically improve the coherence of rationalizations for model decisions, yielding state-of-the-art results on Tiered Reasoning for Intuitive Physics (TRIP). We also find that this improved coherence is a direct result of more faithful attention to relevant language context in each step of reasoning. Our findings suggest that human-like reasoning strategies can effectively improve the coherence and reliability of PLM reasoning.