 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboMME: Benchmarking and Understanding Memory for Robotic Generalist Policies
Mar 04, 2026Memory is critical for long-horizon and history-dependent robotic manipulation. Such tasks often involve counting repeated actions or manipulating objects that become temporarily occluded. Recent vision-language-action (VLA) models have begun to incorporate memory mechanisms; however, their evaluations remain confined to narrow, non-standardized settings. This limits their systematic understanding, comparison, and progress measurement. To address these challenges, we introduce RoboMME: a large-scale standardized benchmark for evaluating and advancing VLA models in long-horizon, history-dependent scenarios. Our benchmark comprises 16 manipulation tasks constructed under a carefully designed taxonomy that evaluates temporal, spatial, object, and procedural memory. We further develop a suite of 14 memory-augmented VLA variants built on the π0.5 backbone to systematically explore different memory representations across multiple integration strategies. Experimental results show that the effectiveness of memory representations is highly task-dependent, with each design offering distinct advantages and limitations across different tasks. Videos and code can be found at our website https://robomme.github.io.
HydroShear: Hydroelastic Shear Simulation for Tactile Sim-to-Real Reinforcement Learning
Feb 28, 2026In this paper, we address the problem of tactile sim-to-real policy transfer for contact-rich tasks. Existing methods primarily focus on vision-based sensors and emphasize image rendering quality while providing overly simplistic models of force and shear. Consequently, these models exhibit a large sim-to-real gap for many dexterous tasks. Here, we present HydroShear, a non-holonomic hydroelastic tactile simulator that advances the state-of-the-art by modeling: a) stick-slip transitions, b) path-dependent force and shear build up, and c) full SE(3) object-sensor interactions. HydroShear extends hydroelastic contact models using Signed Distance Functions (SDFs) to track the displacements of the on-surface points of an indenter during physical interaction with the sensor membrane. Our approach generates physics-based, computationally efficient force fields from arbitrary watertight geometries while remaining agnostic to the underlying physics engine. In experiments with GelSight Minis, HydroShear more faithfully reproduces real tactile shear compared to existing methods. This fidelity enables zero-shot sim-to-real transfer of reinforcement learning policies across four tasks: peg insertion, bin packing, book shelving for insertion, and drawer pulling for fine gripper control under slip. Our method achieves a 93% average success rate, outperforming policies trained on tactile images (34%) and alternative shear simulation methods (58%-61%).
AimBot: A Simple Auxiliary Visual Cue to Enhance Spatial Awareness of Visuomotor Policies
Aug 11, 2025In this paper, we propose AimBot, a lightweight visual augmentation technique that provides explicit spatial cues to improve visuomotor policy learning in robotic manipulation. AimBot overlays shooting lines and scope reticles onto multi-view RGB images, offering auxiliary visual guidance that encodes the end-effector's state. The overlays are computed from depth images, camera extrinsics, and the current end-effector pose, explicitly conveying spatial relationships between the gripper and objects in the scene. AimBot incurs minimal computational overhead (less than 1 ms) and requires no changes to model architectures, as it simply replaces original RGB images with augmented counterparts. Despite its simplicity, our results show that AimBot consistently improves the performance of various visuomotor policies in both simulation and real-world settings, highlighting the benefits of spatially grounded visual feedback.
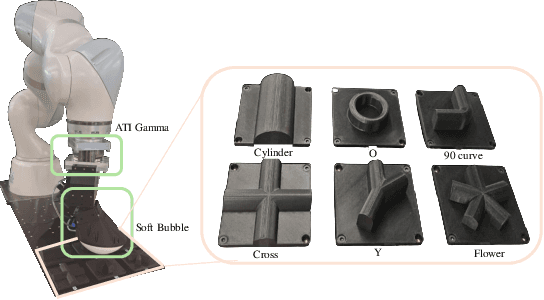
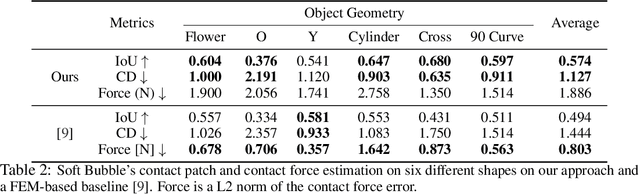
ViTaSCOPE: Visuo-tactile Implicit Representation for In-hand Pose and Extrinsic Contact Estimation
Jun 13, 2025



Mastering dexterous, contact-rich object manipulation demands precise estimation of both in-hand object poses and external contact locations$\unicode{x2013}$tasks particularly challenging due to partial and noisy observations. We present ViTaSCOPE: Visuo-Tactile Simultaneous Contact and Object Pose Estimation, an object-centric neural implicit representation that fuses vision and high-resolution tactile feedback. By representing objects as signed distance fields and distributed tactile feedback as neural shear fields, ViTaSCOPE accurately localizes objects and registers extrinsic contacts onto their 3D geometry as contact fields. Our method enables seamless reasoning over complementary visuo-tactile cues by leveraging simulation for scalable training and zero-shot transfers to the real-world by bridging the sim-to-real gap. We evaluate our method through comprehensive simulated and real-world experiments, demonstrating its capabilities in dexterous manipulation scenarios.
Neural Inverse Source Problems
Nov 03, 2024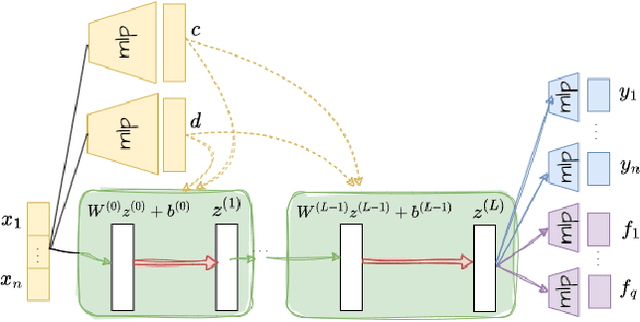
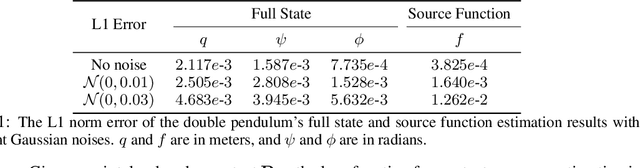
Reconstructing unknown external source functions is an important perception capability for a large range of robotics domains including manipulation, aerial, and underwater robotics. In this work, we propose a Physics-Informed Neural Network (PINN [1]) based approach for solving the inverse source problems in robotics, jointly identifying unknown source functions and the complete state of a system given partial and noisy observations. Our approach demonstrates several advantages over prior works (Finite Element Methods (FEM) and data-driven approaches): it offers flexibility in integrating diverse constraints and boundary conditions; eliminates the need for complex discretizations (e.g., meshing); easily accommodates gradients from real measurements; and does not limit performance based on the diversity and quality of training data. We validate our method across three simulation and real-world scenarios involving up to 4th order partial differential equations (PDEs), constraints such as Signorini and Dirichlet, and various regression losses including Chamfer distance and L2 norm.
Do Vision-Language Models Represent Space and How? Evaluating Spatial Frame of Reference Under Ambiguities
Oct 22, 2024Spatial expressions in situated communication can be ambiguous, as their meanings vary depending on the frames of reference (FoR) adopted by speakers and listeners. While spatial language understanding and reasoning by vision-language models (VLMs) have gained increasing attention, potential ambiguities in these models are still under-explored. To address this issue, we present the COnsistent Multilingual Frame Of Reference Test (COMFORT), an evaluation protocol to systematically assess the spatial reasoning capabilities of VLMs. We evaluate nine state-of-the-art VLMs using COMFORT. Despite showing some alignment with English conventions in resolving ambiguities, our experiments reveal significant shortcomings of VLMs: notably, the models (1) exhibit poor robustness and consistency, (2) lack the flexibility to accommodate multiple FoRs, and (3) fail to adhere to language-specific or culture-specific conventions in cross-lingual tests, as English tends to dominate other languages. With a growing effort to align vision-language models with human cognitive intuitions, we call for more attention to the ambiguous nature and cross-cultural diversity of spatial reasoning.
Visual-auditory Extrinsic Contact Estimation
Sep 22, 2024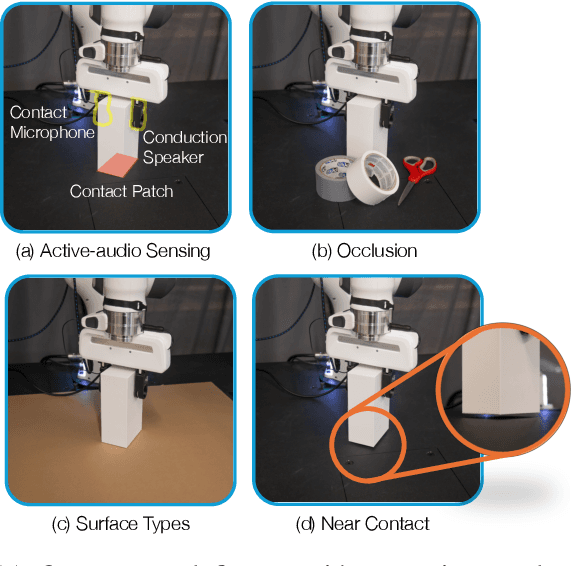
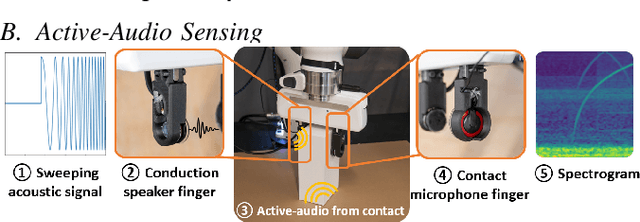
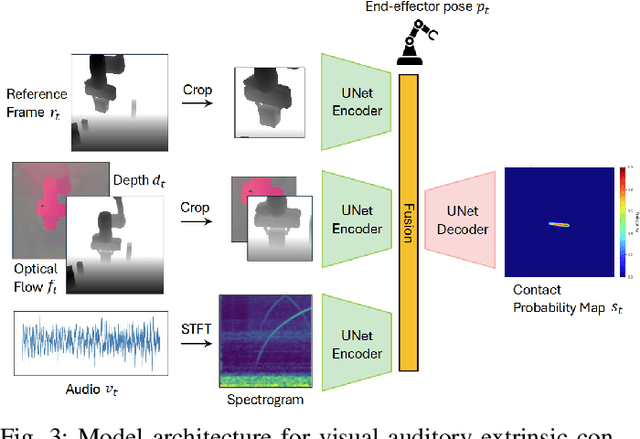
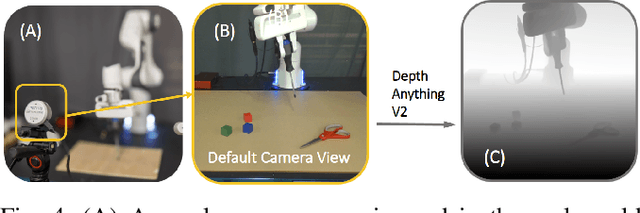
Estimating contact locations between a grasped object and the environment is important for robust manipulation. In this paper, we present a visual-auditory method for extrinsic contact estimation, featuring a real-to-sim approach for auditory signals. Our method equips a robotic manipulator with contact microphones and speakers on its fingers, along with an externally mounted static camera providing a visual feed of the scene. As the robot manipulates objects, it detects contact events with surrounding surfaces using auditory feedback from the fingertips and visual feedback from the camera. A key feature of our approach is the transfer of auditory feedback into a simulated environment, where we learn a multimodal representation that is then applied to real world scenes without additional training. This zero-shot transfer is accurate and robust in estimating contact location and size, as demonstrated in our simulated and real world experiments in various cluttered environments.
Naturalistic Robot Arm Trajectory Generation via Representation Learning
Sep 14, 2023


The integration of manipulator robots in household environments suggests a need for more predictable and human-like robot motion. This holds especially true for wheelchair-mounted assistive robots that can support the independence of people with paralysis. One method of generating naturalistic motion trajectories is via the imitation of human demonstrators. This paper explores a self-supervised imitation learning method using an autoregressive spatio-temporal graph neural network for an assistive drinking task. We address learning from diverse human motion trajectory data that were captured via wearable IMU sensors on a human arm as the action-free task demonstrations. Observed arm motion data from several participants is used to generate natural and functional drinking motion trajectories for a UR5e robot arm.
* 4 pages, 3 figures