 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniTac-NV: A Unified Tactile Representation For Non-Vision-Based Tactile Sensors
Jun 24, 2025Generalizable algorithms for tactile sensing remain underexplored, primarily due to the diversity of sensor modalities. Recently, many methods for cross-sensor transfer between optical (vision-based) tactile sensors have been investigated, yet little work focus on non-optical tactile sensors. To address this gap, we propose an encoder-decoder architecture to unify tactile data across non-vision-based sensors. By leveraging sensor-specific encoders, the framework creates a latent space that is sensor-agnostic, enabling cross-sensor data transfer with low errors and direct use in downstream applications. We leverage this network to unify tactile data from two commercial tactile sensors: the Xela uSkin uSPa 46 and the Contactile PapillArray. Both were mounted on a UR5e robotic arm, performing force-controlled pressing sequences against distinct object shapes (circular, square, and hexagonal prisms) and two materials (rigid PLA and flexible TPU). Another more complex unseen object was also included to investigate the model's generalization capabilities. We show that alignment in latent space can be implicitly learned from joint autoencoder training with matching contacts collected via different sensors. We further demonstrate the practical utility of our approach through contact geometry estimation, where downstream models trained on one sensor's latent representation can be directly applied to another without retraining.
Variable-Friction In-Hand Manipulation for Arbitrary Objects via Diffusion-Based Imitation Learning
Mar 04, 2025



Dexterous in-hand manipulation (IHM) for arbitrary objects is challenging due to the rich and subtle contact process. Variable-friction manipulation is an alternative approach to dexterity, previously demonstrating robust and versatile 2D IHM capabilities with only two single-joint fingers. However, the hard-coded manipulation methods for variable friction hands are restricted to regular polygon objects and limited target poses, as well as requiring the policy to be tailored for each object. This paper proposes an end-to-end learning-based manipulation method to achieve arbitrary object manipulation for any target pose on real hardware, with minimal engineering efforts and data collection. The method features a diffusion policy-based imitation learning method with co-training from simulation and a small amount of real-world data. With the proposed framework, arbitrary objects including polygons and non-polygons can be precisely manipulated to reach arbitrary goal poses within 2 hours of training on an A100 GPU and only 1 hour of real-world data collection. The precision is higher than previous customized object-specific policies, achieving an average success rate of 71.3% with average pose error being 2.676 mm and 1.902 degrees.
Naturalistic Robot Arm Trajectory Generation via Representation Learning
Sep 14, 2023


The integration of manipulator robots in household environments suggests a need for more predictable and human-like robot motion. This holds especially true for wheelchair-mounted assistive robots that can support the independence of people with paralysis. One method of generating naturalistic motion trajectories is via the imitation of human demonstrators. This paper explores a self-supervised imitation learning method using an autoregressive spatio-temporal graph neural network for an assistive drinking task. We address learning from diverse human motion trajectory data that were captured via wearable IMU sensors on a human arm as the action-free task demonstrations. Observed arm motion data from several participants is used to generate natural and functional drinking motion trajectories for a UR5e robot arm.
* 4 pages, 3 figures
InstaGrasp: An Entirely 3D Printed Adaptive Gripper with TPU Soft Elements and Minimal Assembly Time
May 26, 2023



Fabricating existing and popular open-source adaptive robotic grippers commonly involves using multiple professional machines, purchasing a wide range of parts, and tedious, time-consuming assembly processes. This poses a significant barrier to entry for some robotics researchers and drives others to opt for expensive commercial alternatives. To provide both parties with an easier and cheaper (under 100GBP) solution, we propose a novel adaptive gripper design where every component (with the exception of actuators and the screws that come packaged with them) can be fabricated on a hobby-grade 3D printer, via a combination of inexpensive and readily available PLA and TPU filaments. This approach means that the gripper's tendons, flexure joints and finger pads are now printed, as a replacement for traditional string-tendons and molded urethane flexures and pads. A push-fit systems results in an assembly time of under 10 minutes. The gripper design is also highly modular and requires only a few minutes to replace any part, leading to extremely user-friendly maintenance and part modifications. An extensive stress test has shown a level of durability more than suitable for research, whilst grasping experiments (with perturbations) using items from the YCB object set has also proven its mechanical adaptability to be highly satisfactory.
E-TRoll: Tactile Sensing and Classification via A Simple Robotic Gripper for Extended Rolling Manipulations
Dec 08, 2022



Robotic tactile sensing provides a method of recognizing objects and their properties where vision fails. Prior work on tactile perception in robotic manipulation has frequently focused on exploratory procedures (EPs). However, the also-human-inspired technique of in-hand-manipulation can glean rich data in a fraction of the time of EPs. We propose a simple 3-DOF robotic hand design, optimized for object rolling tasks via a variable-width palm and associated control system. This system dynamically adjusts the distance between the finger bases in response to object behavior. Compared to fixed finger bases, this technique significantly increases the area of the object that is exposed to finger-mounted tactile arrays during a single rolling motion (an increase of over 60% was observed for a cylinder with a 30-millimeter diameter). In addition, this paper presents a feature extraction algorithm for the collected spatiotemporal dataset, which focuses on object corner identification, analysis, and compact representation. This technique drastically reduces the dimensionality of each data sample from 10 x 1500 time series data to 80 features, which was further reduced by Principal Component Analysis (PCA) to 22 components. An ensemble subspace k-nearest neighbors (KNN) classification model was trained with 90 observations on rolling three different geometric objects, resulting in a three-fold cross-validation accuracy of 95.6% for object shape recognition.
Region-Based Planning for 3D Within-Hand-Manipulation via Variable Friction Robot Fingers and Extrinsic Contacts
Nov 13, 2020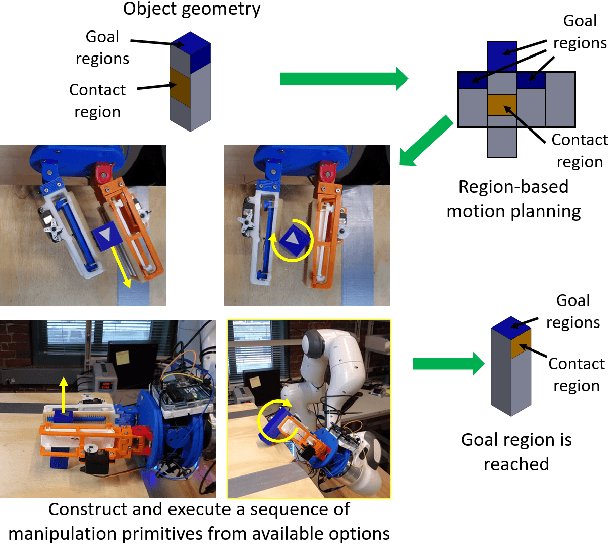
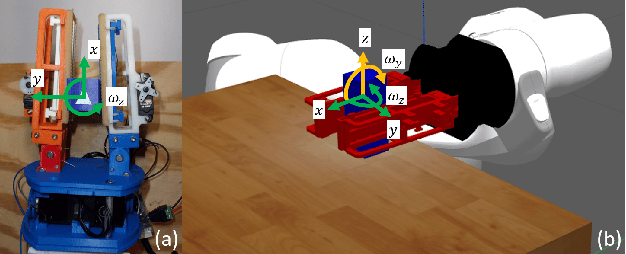
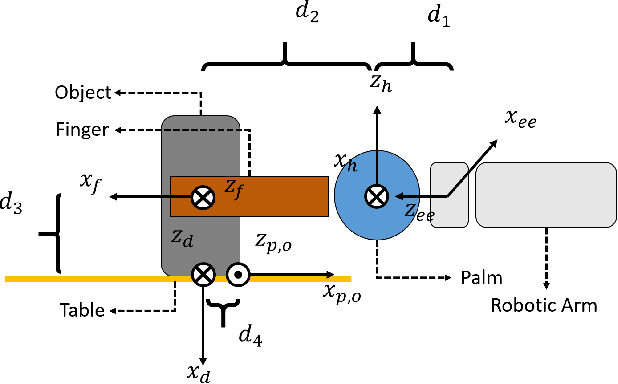
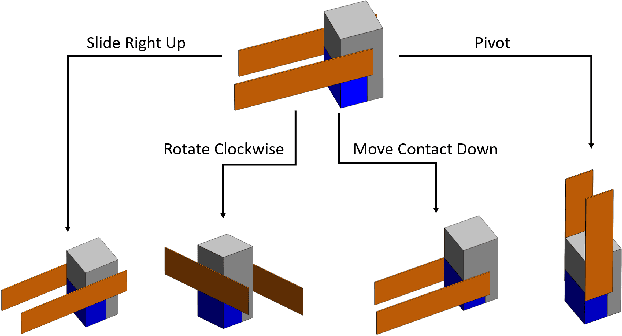
Attempts to achieve robotic Within-Hand-Manipulation (WIHM) generally utilize either high-DOF robotic hands with elaborate sensing apparatus or multi-arm robotic systems. In prior work we presented a simple robot hand with variable friction robot fingers, which allow a low-complexity approach to within-hand object translation and rotation, though this manipulation was limited to planar actions. In this work we extend the capabilities of this system to 3D manipulation with a novel region-based WIHM planning algorithm and utilizing extrinsic contacts. The ability to modulate finger friction enhances extrinsic dexterity for three-dimensional WIHM, and allows us to operate in the quasi-static level. The region-based planner automatically generates 3D manipulation sequences with a modified A* formulation that navigates the contact regions between the fingers and the object surface to reach desired regions. Central to this method is a set of object-motion primitives (i.e. within-hand sliding, rotation and pivoting), which can easily be achieved via changing contact friction. A wide range of goal regions can be achieved via this approach, which is demonstrated via real robot experiments following a standardized in-hand manipulation benchmarking protocol.
Dimensionality Reduction and Motion Clustering during Activities of Daily Living: 3, 4, and 7 Degree-of-Freedom Arm Movements
Feb 17, 2020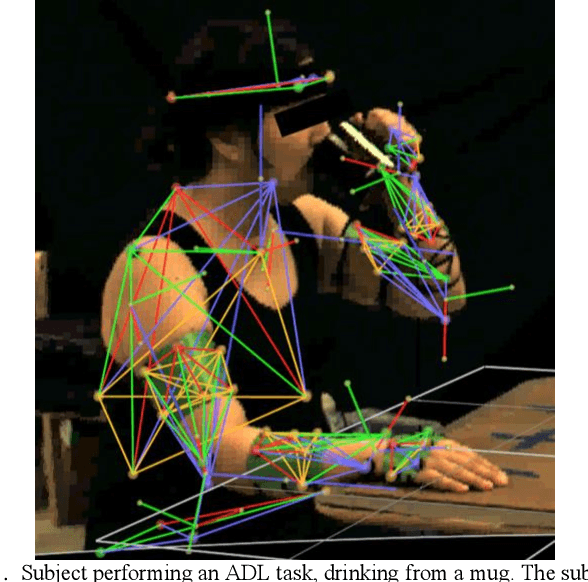
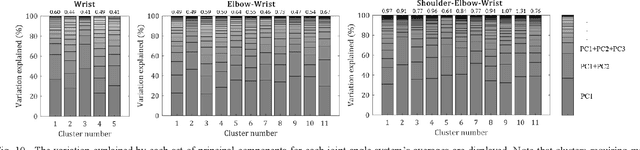
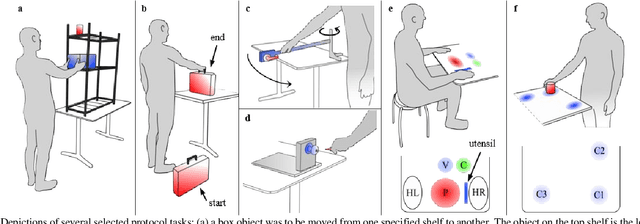
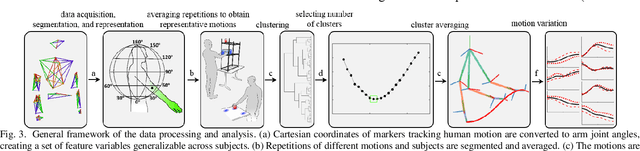
The wide variety of motions performed by the human arm during daily tasks makes it desirable to find representative subsets to reduce the dimensionality of these movements for a variety of applications, including the design and control of robotic and prosthetic devices. This paper presents a novel method and the results of an extensive human subjects study to obtain representative arm joint angle trajectories that span naturalistic motions during Activities of Daily Living (ADLs). In particular, we seek to identify sets of useful motion trajectories of the upper limb that are functions of a single variable, allowing, for instance, an entire prosthetic or robotic arm to be controlled with a single input from a user, along with a means to select between motions for different tasks. Data driven approaches are used to obtain clusters as well as representative motion averages for the full-arm 7 degree of freedom (DOF), elbow-wrist 4 DOF, and wrist-only 3 DOF motions. The proposed method makes use of well-known techniques such as dynamic time warping (DTW) to obtain a divergence measure between motion segments, DTW barycenter averaging (DBA) to obtain averages, Ward's distance criterion to build hierarchical trees, batch-DTW to simultaneously align multiple motion data, and functional principal component analysis (fPCA) to evaluate cluster variability. The clusters that emerge associate various recorded motions into primarily hand start and end location for the full-arm system, motion direction for the wrist-only system, and an intermediate between the two qualities for the elbow-wrist system. The proposed clustering methodology is justified by comparing results against alternative approaches.