 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Path Planning in Distinct Topo-Geometric Classes using Neighborhood-augmented Graph and its Application to Path Planning for a Tethered Robot in 3D
Jun 01, 2023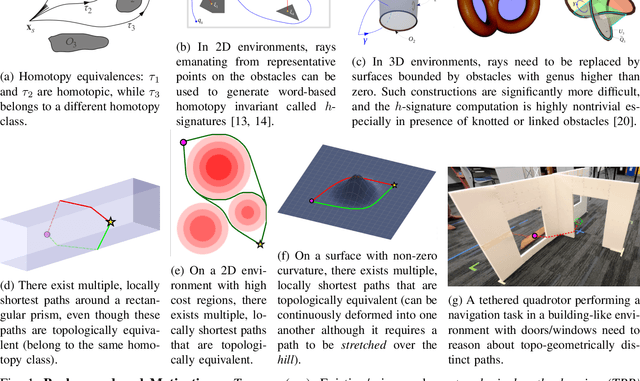
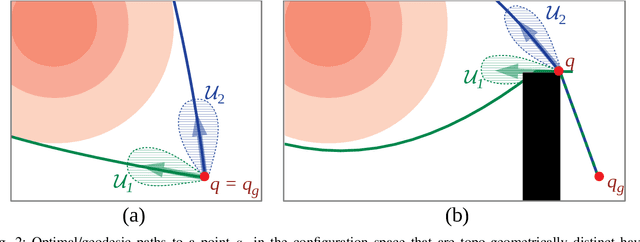
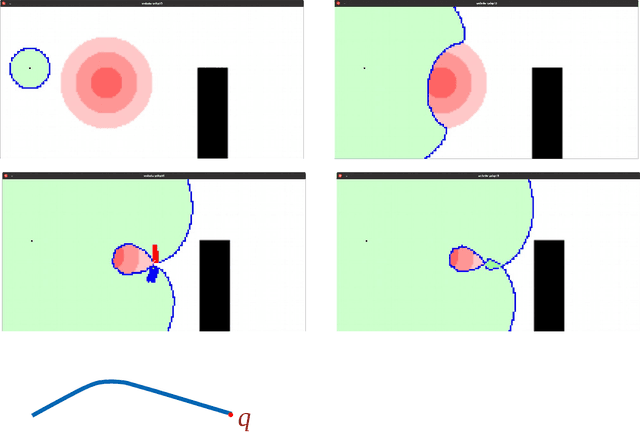
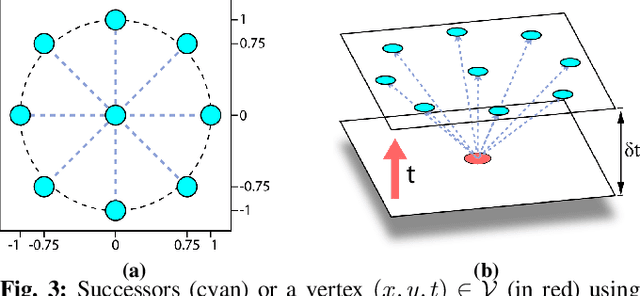
Many robotics applications benefit from being able to compute multiple locally optimal paths in a given configuration space. Examples include path planning for of tethered robots with cable-length constraints, systems involving cables, multi-robot topological exploration & coverage, and, congestion reduction for mobile robots navigation without inter-robot coordination. Existing paradigm is to use topological path planning methods that can provide optimal paths from distinct topological classes available in the underlying configuration space. However, these methods usually require non-trivial and non-universal geometrical constructions, which are prohibitively complex or expensive in 3 or higher dimensional configuration spaces with complex topology. Furthermore, topological methods are unable to distinguish between locally optimal paths that belong to the same topological class but are distinct because of genus-zero obstacles in 3D or due to high-cost or high-curvature regions. In this paper we propose an universal and generalized approach to multi-class path planning using the concept of a novel neighborhood-augmented graph, search-based planning in which can compute paths in distinct topo-geometric classes. This approach can find desired number of locally optimal paths in a wider variety of configuration spaces without requiring any complex pre-processing or geometric constructions. Unlike the existing topological methods, resulting optimal paths are not restricted to distinct topological classes, thus making the algorithm applicable to many other problems where locally optimal and geometrically distinct paths are of interest. For the demonstration of an application of the proposed approach, we implement our algorithm to planning for shortest traversible paths for a tethered robot with cable-length constraint navigating in 3D and validate it in simulations & experiments.
Coordination-free Multi-robot Path Planning for Congestion Reduction Using Topological Reasoning
May 02, 2022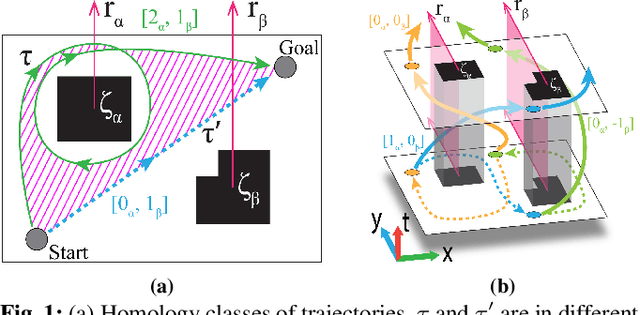

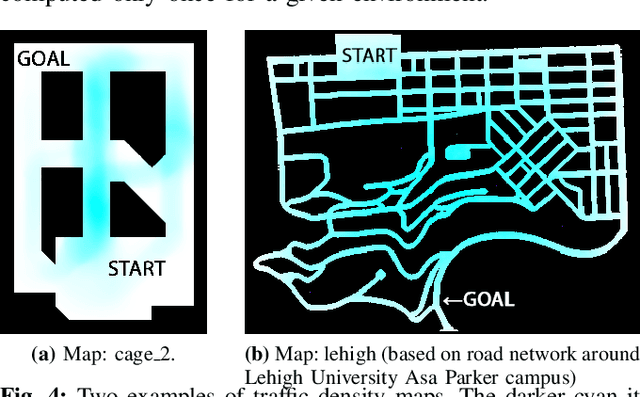
We consider the problem of multi-robot path planning in a complex, cluttered environment with the aim of reducing overall congestion in the environment, while avoiding any inter-robot communication or coordination. Such limitations may exist due to lack of communication or due to privacy restrictions (for example, autonomous vehicles may not want to share their locations or intents with other vehicles or even to a central server). The key insight that allows us to solve this problem is to stochastically distribute the robots across different routes in the environment by assigning them paths in different topologically distinct classes, so as to lower congestion and the overall travel time for all robots in the environment. We outline the computation of topologically distinct paths in a spatio-temporal configuration space and propose methods for the stochastic assignment of paths to the robots. A fast replanning algorithm and a potential field based controller allow robots to avoid collision with nearby agents while following the assigned path. Our simulation and experiment results show a significant advantage over shortest path following under such a coordination-free setup.
Region-Based Planning for 3D Within-Hand-Manipulation via Variable Friction Robot Fingers and Extrinsic Contacts
Nov 13, 2020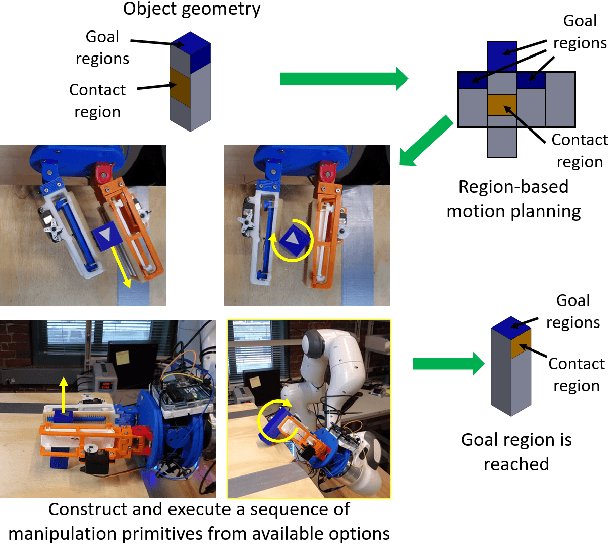
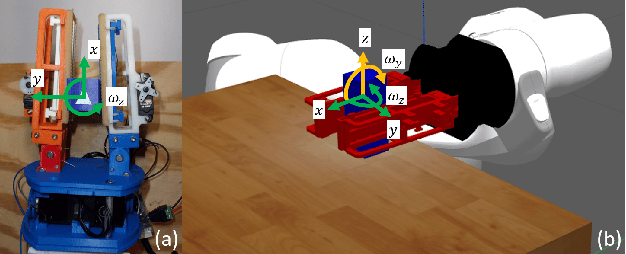
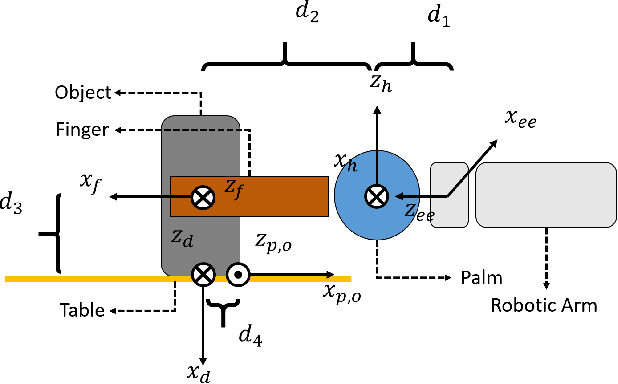
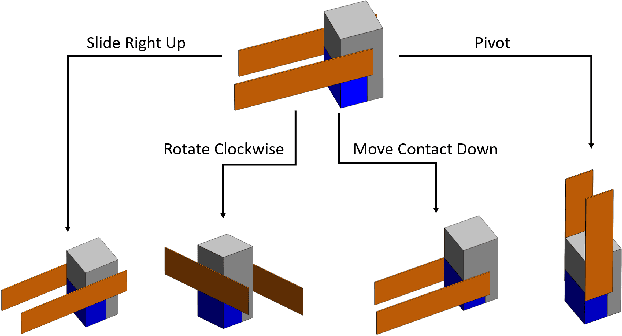
Attempts to achieve robotic Within-Hand-Manipulation (WIHM) generally utilize either high-DOF robotic hands with elaborate sensing apparatus or multi-arm robotic systems. In prior work we presented a simple robot hand with variable friction robot fingers, which allow a low-complexity approach to within-hand object translation and rotation, though this manipulation was limited to planar actions. In this work we extend the capabilities of this system to 3D manipulation with a novel region-based WIHM planning algorithm and utilizing extrinsic contacts. The ability to modulate finger friction enhances extrinsic dexterity for three-dimensional WIHM, and allows us to operate in the quasi-static level. The region-based planner automatically generates 3D manipulation sequences with a modified A* formulation that navigates the contact regions between the fingers and the object surface to reach desired regions. Central to this method is a set of object-motion primitives (i.e. within-hand sliding, rotation and pivoting), which can easily be achieved via changing contact friction. A wide range of goal regions can be achieved via this approach, which is demonstrated via real robot experiments following a standardized in-hand manipulation benchmarking protocol.
Feedback-Based Dynamic Feature Selection for Constrained Continuous Data Acquisition
Nov 10, 2020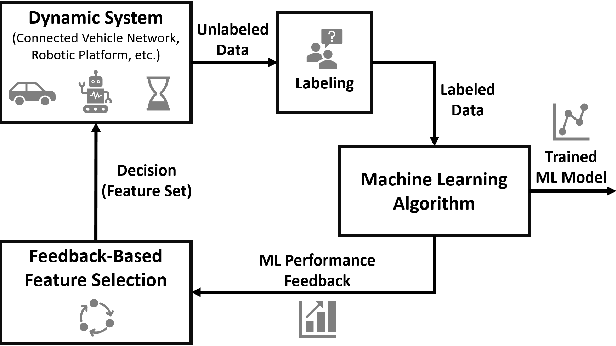
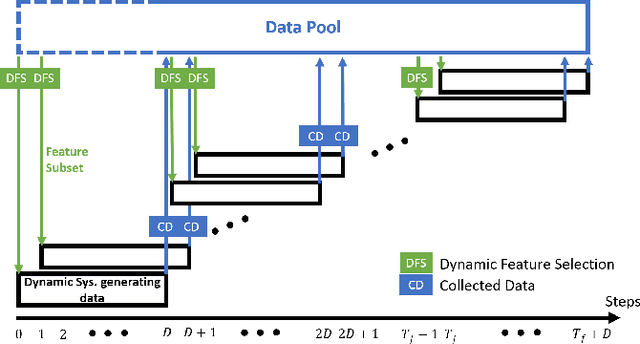
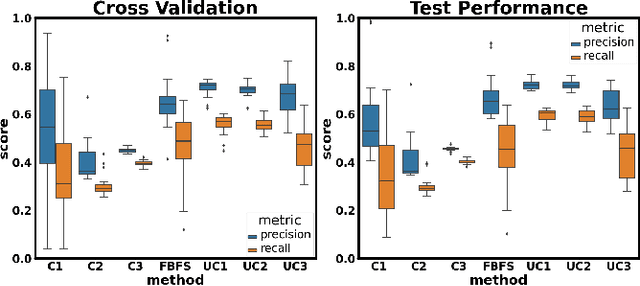

Relevant and high-quality data are critical to successful development of machine learning applications. For machine learning applications on dynamic systems equipped with a large number of sensors, such as connected vehicles and robots, how to find relevant and high-quality data features in an efficient way is a challenging problem. In this work, we address the problem of feature selection in constrained continuous data acquisition. We propose a feedback-based dynamic feature selection algorithm that efficiently decides on the feature set for data collection from a dynamic system in a step-wise manner. We formulate the sequential feature selection procedure as a Markov Decision Process. The machine learning model performance feedback with an exploration component is used as the reward function in an $\epsilon$-greedy action selection. Our evaluation shows that the proposed feedback-based feature selection algorithm has superior performance over constrained baseline methods and matching performance with unconstrained baseline methods.