 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTenodesis Grasp Emulator: Kinematic Assessment of Wrist-Driven Orthotic Control
Nov 22, 2021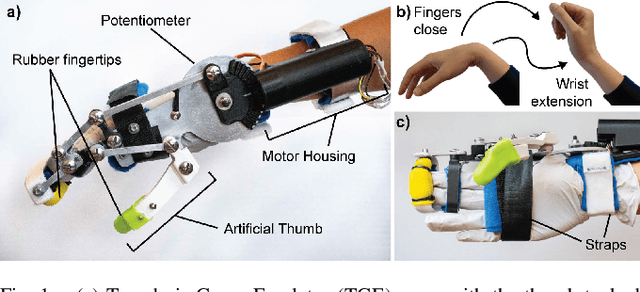
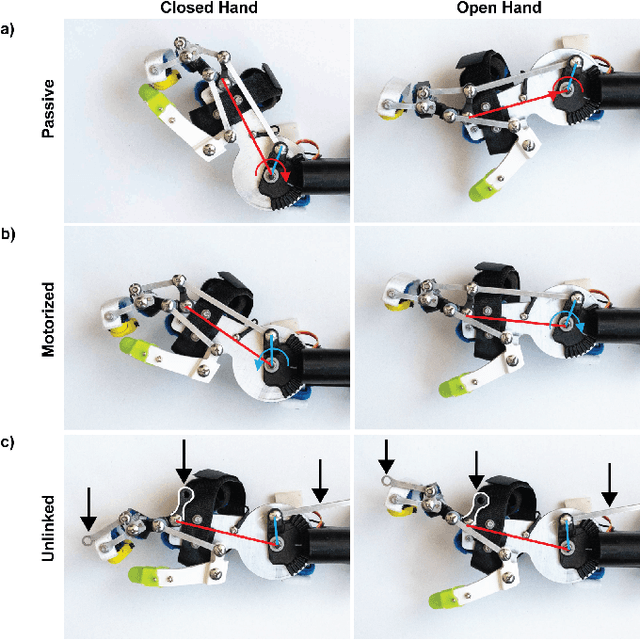
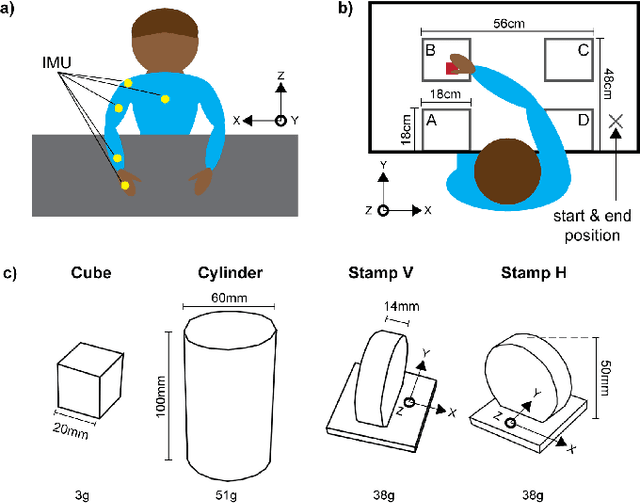
Wrist-driven orthotics have been designed to assist people with C6-7 spinal cord injury, however, the kinematic constraint imposed by such a control strategy can impede mobility and lead to abnormal body motion. This study characterizes body compensation using the novel Tenodesis Grasp Emulator, an adaptor orthotic that allows for the investigation of tenodesis grasping in subjects with unimpaired hand function. Subjects perform a series of grasp-and-release tasks in order to compare normal (test control) and constrained wrist-driven modes, showing significant compensation as a result of the constraint. A motor-augmented mode is also compared against traditional wrist-driven operation, to explore the potential role of hybrid human-robot control. We find that both the passive wrist-driven and motor-augmented modes fulfill different roles throughout various tasks tested. Thus, we conclude that a flexible control scheme that can alter intervention based on the task at hand holds the potential to reduce compensation in future work.
Dimensionality Reduction and Motion Clustering during Activities of Daily Living: 3, 4, and 7 Degree-of-Freedom Arm Movements
Feb 17, 2020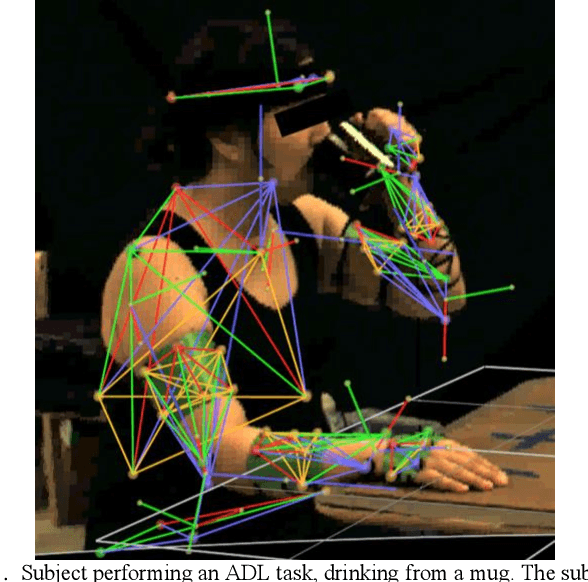
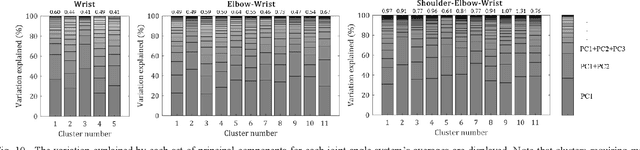
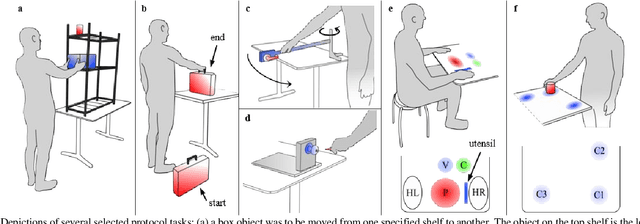
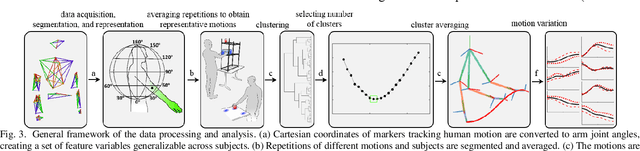
The wide variety of motions performed by the human arm during daily tasks makes it desirable to find representative subsets to reduce the dimensionality of these movements for a variety of applications, including the design and control of robotic and prosthetic devices. This paper presents a novel method and the results of an extensive human subjects study to obtain representative arm joint angle trajectories that span naturalistic motions during Activities of Daily Living (ADLs). In particular, we seek to identify sets of useful motion trajectories of the upper limb that are functions of a single variable, allowing, for instance, an entire prosthetic or robotic arm to be controlled with a single input from a user, along with a means to select between motions for different tasks. Data driven approaches are used to obtain clusters as well as representative motion averages for the full-arm 7 degree of freedom (DOF), elbow-wrist 4 DOF, and wrist-only 3 DOF motions. The proposed method makes use of well-known techniques such as dynamic time warping (DTW) to obtain a divergence measure between motion segments, DTW barycenter averaging (DBA) to obtain averages, Ward's distance criterion to build hierarchical trees, batch-DTW to simultaneously align multiple motion data, and functional principal component analysis (fPCA) to evaluate cluster variability. The clusters that emerge associate various recorded motions into primarily hand start and end location for the full-arm system, motion direction for the wrist-only system, and an intermediate between the two qualities for the elbow-wrist system. The proposed clustering methodology is justified by comparing results against alternative approaches.