 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOSMO: Open-Source Tactile Glove for Human-to-Robot Skill Transfer
Dec 09, 2025Human video demonstrations provide abundant training data for learning robot policies, but video alone cannot capture the rich contact signals critical for mastering manipulation. We introduce OSMO, an open-source wearable tactile glove designed for human-to-robot skill transfer. The glove features 12 three-axis tactile sensors across the fingertips and palm and is designed to be compatible with state-of-the-art hand-tracking methods for in-the-wild data collection. We demonstrate that a robot policy trained exclusively on human demonstrations collected with OSMO, without any real robot data, is capable of executing a challenging contact-rich manipulation task. By equipping both the human and the robot with the same glove, OSMO minimizes the visual and tactile embodiment gap, enabling the transfer of continuous shear and normal force feedback while avoiding the need for image inpainting or other vision-based force inference. On a real-world wiping task requiring sustained contact pressure, our tactile-aware policy achieves a 72% success rate, outperforming vision-only baselines by eliminating contact-related failure modes. We release complete hardware designs, firmware, and assembly instructions to support community adoption.
Neural Inverse Source Problems
Nov 03, 2024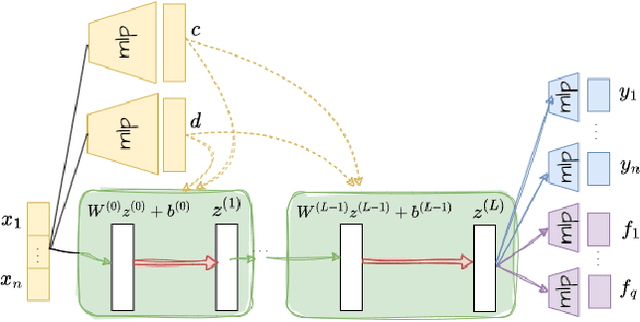
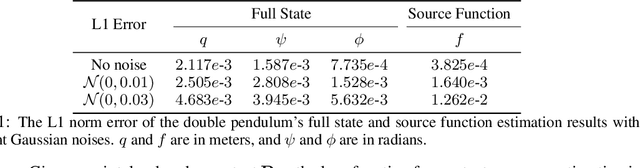
Reconstructing unknown external source functions is an important perception capability for a large range of robotics domains including manipulation, aerial, and underwater robotics. In this work, we propose a Physics-Informed Neural Network (PINN [1]) based approach for solving the inverse source problems in robotics, jointly identifying unknown source functions and the complete state of a system given partial and noisy observations. Our approach demonstrates several advantages over prior works (Finite Element Methods (FEM) and data-driven approaches): it offers flexibility in integrating diverse constraints and boundary conditions; eliminates the need for complex discretizations (e.g., meshing); easily accommodates gradients from real measurements; and does not limit performance based on the diversity and quality of training data. We validate our method across three simulation and real-world scenarios involving up to 4th order partial differential equations (PDEs), constraints such as Signorini and Dirichlet, and various regression losses including Chamfer distance and L2 norm.
Integrated Object Deformation and Contact Patch Estimation from Visuo-Tactile Feedback
May 23, 2023



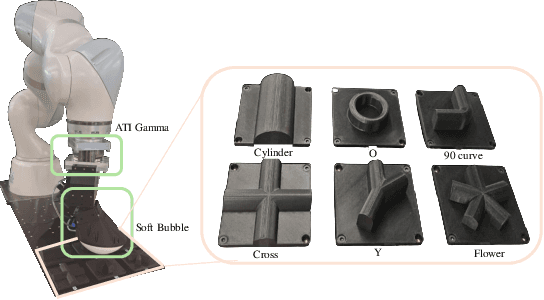
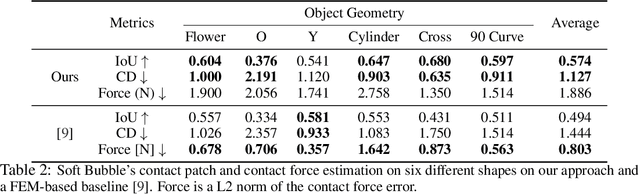
Reasoning over the interplay between object deformation and force transmission through contact is central to the manipulation of compliant objects. In this paper, we propose Neural Deforming Contact Field (NDCF), a representation that jointly models object deformations and contact patches from visuo-tactile feedback using implicit representations. Representing the object geometry and contact with the environment implicitly allows a single model to predict contact patches of varying complexity. Additionally, learning geometry and contact simultaneously allows us to enforce physical priors, such as ensuring contacts lie on the surface of the object. We propose a neural network architecture to learn a NDCF, and train it using simulated data. We then demonstrate that the learned NDCF transfers directly to the real-world without the need for fine-tuning. We benchmark our proposed approach against a baseline representing geometry and contact patches with point clouds. We find that NDCF performs better on simulated data and in transfer to the real-world.
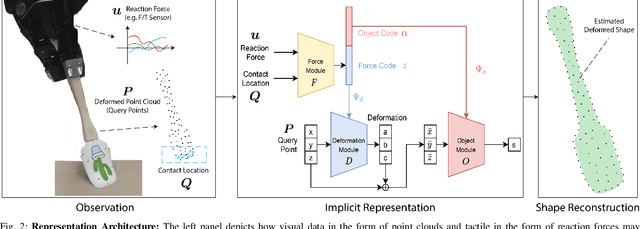
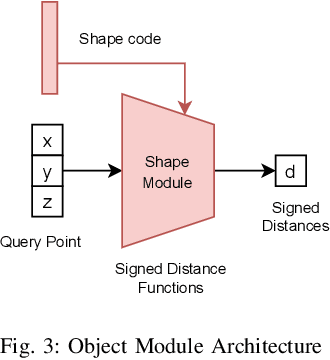
VIRDO++: Real-World, Visuo-tactile Dynamics and Perception of Deformable Objects
Oct 07, 2022

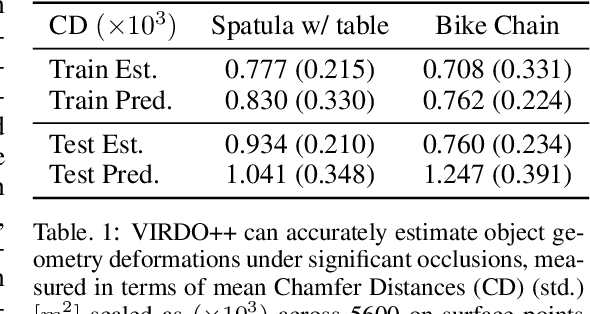
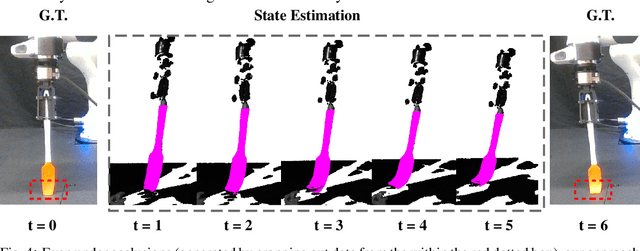
Deformable objects manipulation can benefit from representations that seamlessly integrate vision and touch while handling occlusions. In this work, we present a novel approach for, and real-world demonstration of, multimodal visuo-tactile state-estimation and dynamics prediction for deformable objects. Our approach, VIRDO++, builds on recent progress in multimodal neural implicit representations for deformable object state-estimation [1] via a new formulation for deformation dynamics and a complementary state-estimation algorithm that (i) maintains a belief over deformations, and (ii) enables practical real-world application by removing the need for privileged contact information. In the context of two real-world robotic tasks, we show:(i) high-fidelity cross-modal state-estimation and prediction of deformable objects from partial visuo-tactile feedback, and (ii) generalization to unseen objects and contact formations.
VIRDO: Visio-tactile Implicit Representations of Deformable Objects
Feb 02, 2022

Deformable object manipulation requires computationally efficient representations that are compatible with robotic sensing modalities. In this paper, we present VIRDO:an implicit, multi-modal, and continuous representation for deformable-elastic objects. VIRDO operates directly on visual (point cloud) and tactile (reaction forces) modalities and learns rich latent embeddings of contact locations and forces to predict object deformations subject to external contacts.Here, we demonstrate VIRDOs ability to: i) produce high-fidelity cross-modal reconstructions with dense unsupervised correspondences, ii) generalize to unseen contact formations,and iii) state-estimation with partial visio-tactile feedback