 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHydrosoft: Non-Holonomic Hydroelastic Models for Compliant Tactile Manipulation
Sep 16, 2025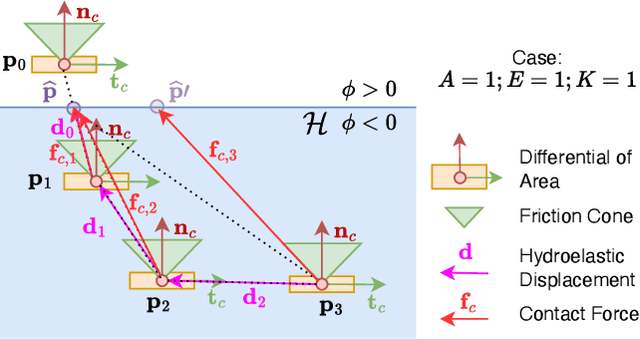
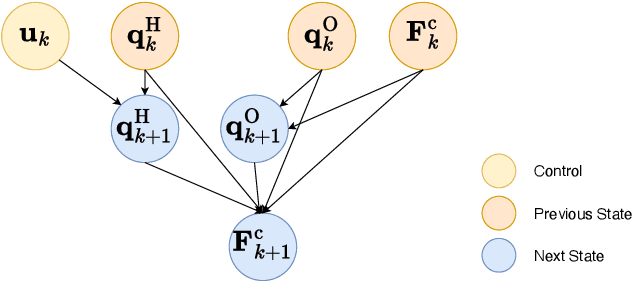
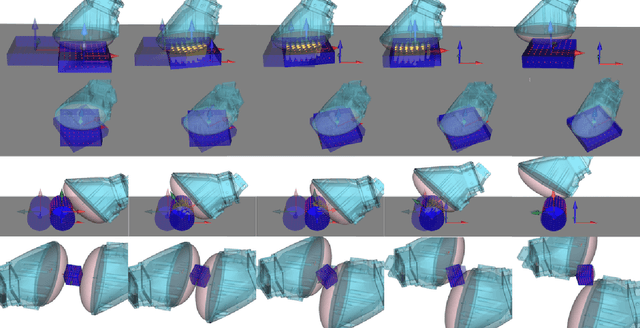
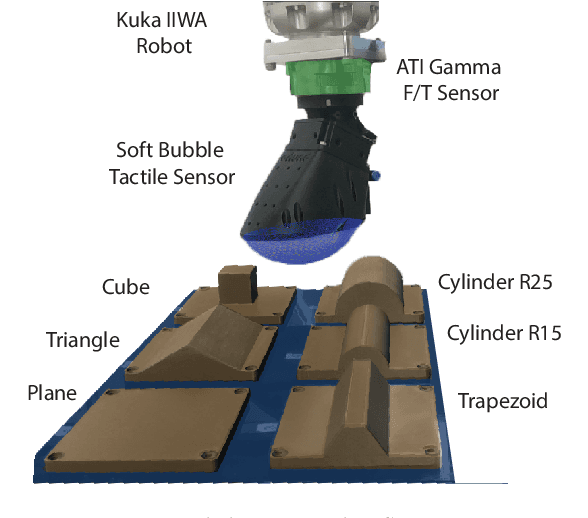
Tactile sensors have long been valued for their perceptual capabilities, offering rich insights into the otherwise hidden interface between the robot and grasped objects. Yet their inherent compliance -- a key driver of force-rich interactions -- remains underexplored. The central challenge is to capture the complex, nonlinear dynamics introduced by these passive-compliant elements. Here, we present a computationally efficient non-holonomic hydroelastic model that accurately models path-dependent contact force distributions and dynamic surface area variations. Our insight is to extend the object's state space, explicitly incorporating the distributed forces generated by the compliant sensor. Our differentiable formulation not only accounts for path-dependent behavior but also enables gradient-based trajectory optimization, seamlessly integrating with high-resolution tactile feedback. We demonstrate the effectiveness of our approach across a range of simulated and real-world experiments and highlight the importance of modeling the path dependence of sensor dynamics.
Estimating Deformable-Rigid Contact Interactions for a Deformable Tool via Learning and Model-Based Optimization
May 16, 2025



Dexterous manipulation requires careful reasoning over extrinsic contacts. The prevalence of deforming tools in human environments, the use of deformable sensors, and the increasing number of soft robots yields a need for approaches that enable dexterous manipulation through contact reasoning where not all contacts are well characterized by classical rigid body contact models. Here, we consider the case of a deforming tool dexterously manipulating a rigid object. We propose a hybrid learning and first-principles approach to the modeling of simultaneous motion and force transfer of tools and objects. The learned module is responsible for jointly estimating the rigid object's motion and the deformable tool's imparted contact forces. We then propose a Contact Quadratic Program to recover forces between the environment and object subject to quasi-static equilibrium and Coulomb friction. The results is a system capable of modeling both intrinsic and extrinsic motions, contacts, and forces during dexterous deformable manipulation. We train our method in simulation and show that our method outperforms baselines under varying block geometries and physical properties, during pushing and pivoting manipulations, and demonstrate transfer to real world interactions. Video results can be found at https://deform-rigid-contact.github.io/.
Neural Inverse Source Problems
Nov 03, 2024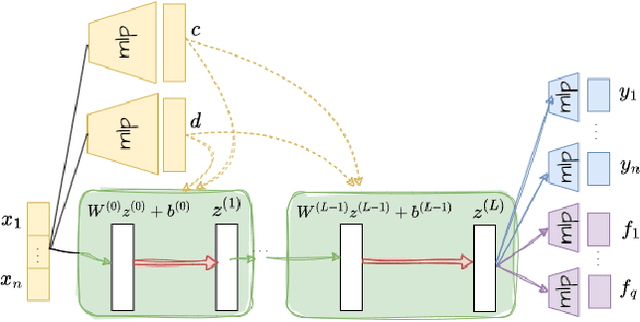
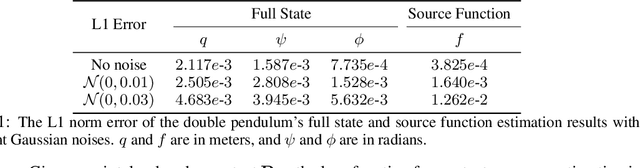
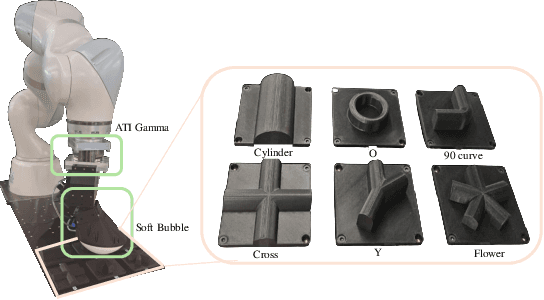
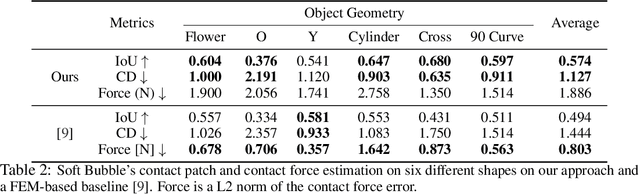
Reconstructing unknown external source functions is an important perception capability for a large range of robotics domains including manipulation, aerial, and underwater robotics. In this work, we propose a Physics-Informed Neural Network (PINN [1]) based approach for solving the inverse source problems in robotics, jointly identifying unknown source functions and the complete state of a system given partial and noisy observations. Our approach demonstrates several advantages over prior works (Finite Element Methods (FEM) and data-driven approaches): it offers flexibility in integrating diverse constraints and boundary conditions; eliminates the need for complex discretizations (e.g., meshing); easily accommodates gradients from real measurements; and does not limit performance based on the diversity and quality of training data. We validate our method across three simulation and real-world scenarios involving up to 4th order partial differential equations (PDEs), constraints such as Signorini and Dirichlet, and various regression losses including Chamfer distance and L2 norm.
Contrastive Touch-to-Touch Pretraining
Oct 15, 2024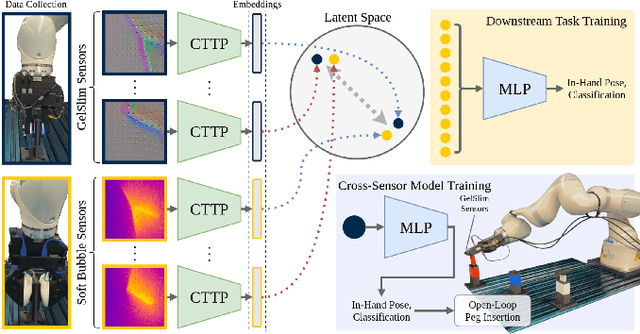
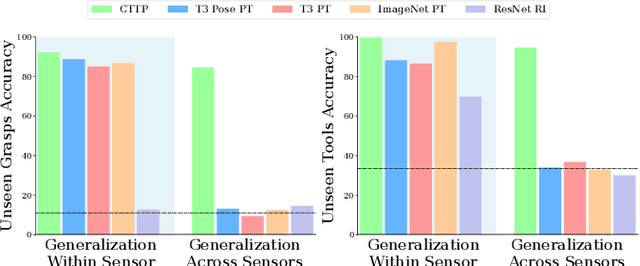
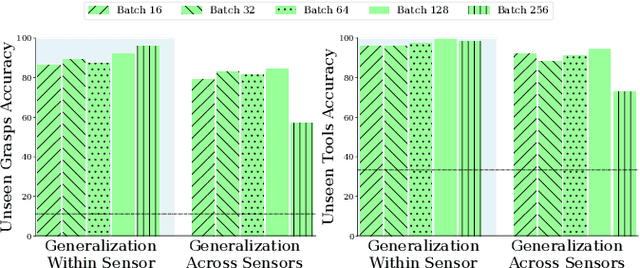

Today's tactile sensors have a variety of different designs, making it challenging to develop general-purpose methods for processing touch signals. In this paper, we learn a unified representation that captures the shared information between different tactile sensors. Unlike current approaches that focus on reconstruction or task-specific supervision, we leverage contrastive learning to integrate tactile signals from two different sensors into a shared embedding space, using a dataset in which the same objects are probed with multiple sensors. We apply this approach to paired touch signals from GelSlim and Soft Bubble sensors. We show that our learned features provide strong pretraining for downstream pose estimation and classification tasks. We also show that our embedding enables models trained using one touch sensor to be deployed using another without additional training. Project details can be found at https://www.mmintlab.com/research/cttp/.
Tactile Neural De-rendering
Sep 20, 2024
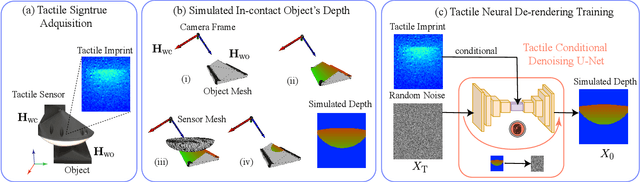

Tactile sensing has proven to be an invaluable tool for enhancing robotic perception, particularly in scenarios where visual data is limited or unavailable. However, traditional methods for pose estimation using tactile data often rely on intricate modeling of sensor mechanics or estimation of contact patches, which can be cumbersome and inherently deterministic. In this work, we introduce Tactile Neural De-rendering, a novel approach that leverages a generative model to reconstruct a local 3D representation of an object based solely on its tactile signature. By rendering the object as though perceived by a virtual camera embedded at the fingertip, our method provides a more intuitive and flexible representation of the tactile data. This 3D reconstruction not only facilitates precise pose estimation but also allows for the quantification of uncertainty, providing a robust framework for tactile-based perception in robotics.
Touch2Touch: Cross-Modal Tactile Generation for Object Manipulation
Sep 12, 2024



Today's touch sensors come in many shapes and sizes. This has made it challenging to develop general-purpose touch processing methods since models are generally tied to one specific sensor design. We address this problem by performing cross-modal prediction between touch sensors: given the tactile signal from one sensor, we use a generative model to estimate how the same physical contact would be perceived by another sensor. This allows us to apply sensor-specific methods to the generated signal. We implement this idea by training a diffusion model to translate between the popular GelSlim and Soft Bubble sensors. As a downstream task, we perform in-hand object pose estimation using GelSlim sensors while using an algorithm that operates only on Soft Bubble signals. The dataset, the code, and additional details can be found at https://www.mmintlab.com/research/touch2touch/.
Tactile-Driven Non-Prehensile Object Manipulation via Extrinsic Contact Mode Control
May 28, 2024In this paper, we consider the problem of non-prehensile manipulation using grasped objects. This problem is a superset of many common manipulation skills including instances of tool-use (e.g., grasped spatula flipping a burger) and assembly (e.g., screwdriver tightening a screw). Here, we present an algorithmic approach for non-prehensile manipulation leveraging a gripper with highly compliant and high-resolution tactile sensors. Our approach solves for robot actions that drive object poses and forces to desired values while obeying the complex dynamics induced by the sensors as well as the constraints imposed by static equilibrium, object kinematics, and frictional contact. Our method is able to produce a variety of manipulation skills and is amenable to gradient-based optimization by exploiting differentiability within contact modes (e.g., specifications of sticking or sliding contacts). We evaluate 4 variants of controllers that attempt to realize these plans and demonstrate a number of complex skills including non-prehensile planar sliding and pivoting on a variety of object geometries. The perception and controls capabilities that drive these skills are the building blocks towards dexterous and reactive autonomy in unstructured environments.
Manipulation via Membranes: High-Resolution and Highly Deformable Tactile Sensing and Control
Sep 27, 2022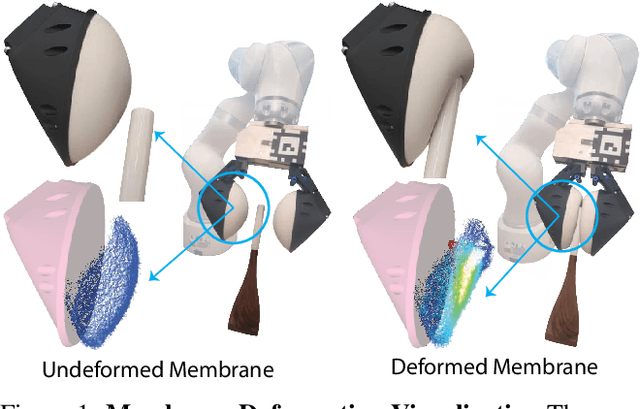
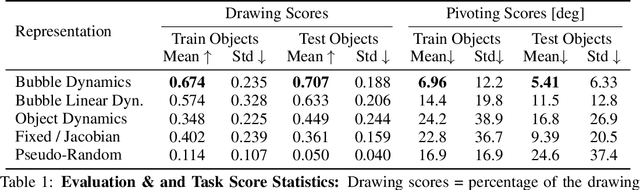
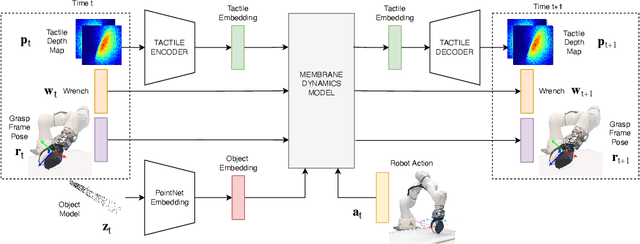
Collocated tactile sensing is a fundamental enabling technology for dexterous manipulation. However, deformable sensors introduce complex dynamics between the robot, grasped object, and environment that must be considered for fine manipulation. Here, we propose a method to learn soft tactile sensor membrane dynamics that accounts for sensor deformations caused by the physical interaction between the grasped object and environment. Our method combines the perceived 3D geometry of the membrane with proprioceptive reaction wrenches to predict future deformations conditioned on robot action. Grasped object poses are recovered from membrane geometry and reaction wrenches, decoupling interaction dynamics from the tactile observation model. We benchmark our approach on two real-world contact-rich tasks: drawing with a grasped marker and in-hand pivoting. Our results suggest that explicitly modeling membrane dynamics achieves better task performance and generalization to unseen objects than baselines.