 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContrastive Touch-to-Touch Pretraining
Oct 15, 2024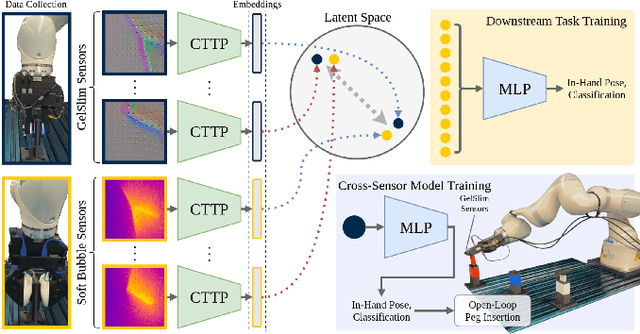
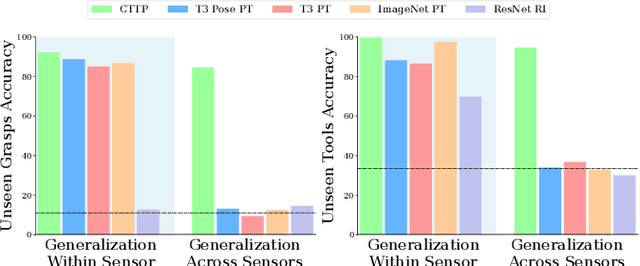
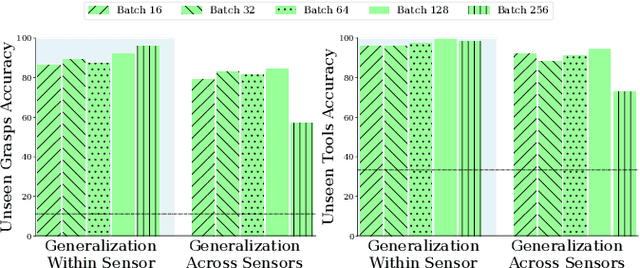

Today's tactile sensors have a variety of different designs, making it challenging to develop general-purpose methods for processing touch signals. In this paper, we learn a unified representation that captures the shared information between different tactile sensors. Unlike current approaches that focus on reconstruction or task-specific supervision, we leverage contrastive learning to integrate tactile signals from two different sensors into a shared embedding space, using a dataset in which the same objects are probed with multiple sensors. We apply this approach to paired touch signals from GelSlim and Soft Bubble sensors. We show that our learned features provide strong pretraining for downstream pose estimation and classification tasks. We also show that our embedding enables models trained using one touch sensor to be deployed using another without additional training. Project details can be found at https://www.mmintlab.com/research/cttp/.
GelSlim 4.0: Focusing on Touch and Reproducibility
Sep 29, 2024



Tactile sensing provides robots with rich feedback during manipulation, enabling a host of perception and controls capabilities. Here, we present a new open-source, vision-based tactile sensor designed to promote reproducibility and accessibility across research and hobbyist communities. Building upon the GelSlim 3.0 sensor, our design features two key improvements: a simplified, modifiable finger structure and easily manufacturable lenses. To complement the hardware, we provide an open-source perception library that includes depth and shear field estimation algorithms to enable in-hand pose estimation, slip detection, and other manipulation tasks. Our sensor is accompanied by comprehensive manufacturing documentation, ensuring the design can be readily produced by users with varying levels of expertise. We validate the sensor's reproducibility through extensive human usability testing. For documentation, code, and data, please visit the project website: https://www.mmintlab.com/research/gelslim-4-0/
Lumped-Parameter Modeling and Control for Robotic High-Viscosity Fluid Dispensing in Additive Manufacturing
Oct 19, 2022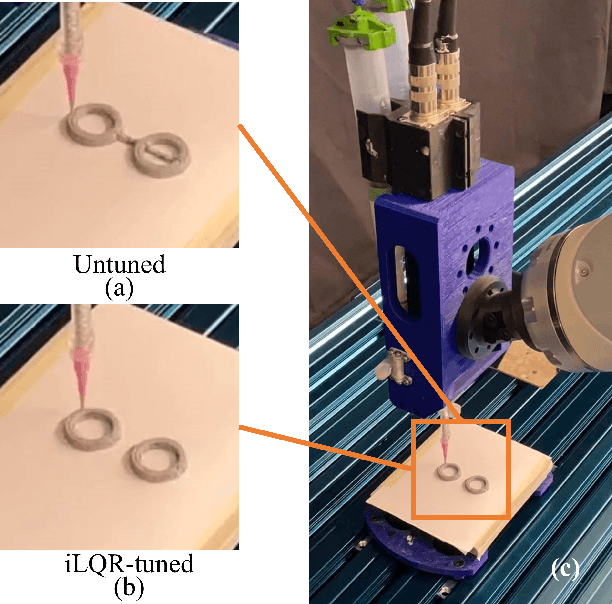
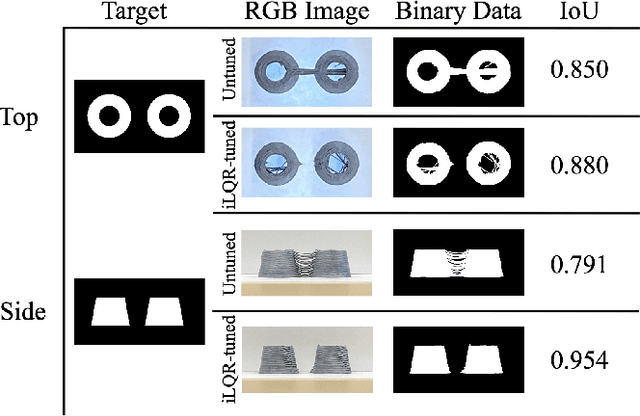
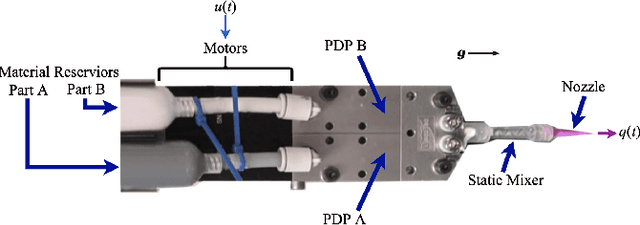
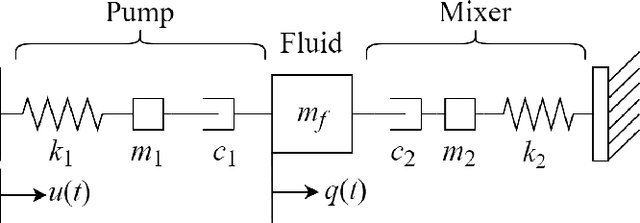
In this paper, we present a novel flow model and compensation strategy for high-viscosity fluid deposition that yields high quality parts in the face of large transient delays and nonlinearity. Robotic high-viscosity fluid deposition is an essential process for a broad range of manufacturing applications including additive manufacturing, adhesive and sealant dispensing, and soft robotics. However, high-viscosity fluid deposition without compensation can lead to poor part quality and defects due to large transient delays and complex fluid dynamics. Our computationally efficient model is well-suited to real-time control and can be quickly calibrated and our compensation strategy leverages an iterative Linear-Quadratic Regulator to compute compensated deposition paths that can be deployed on most dispensing systems, without additional hardware. We demonstrate the improvements provided by our method when 3D printing using a robotic manipulator.