 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContrastive Touch-to-Touch Pretraining
Oct 15, 2024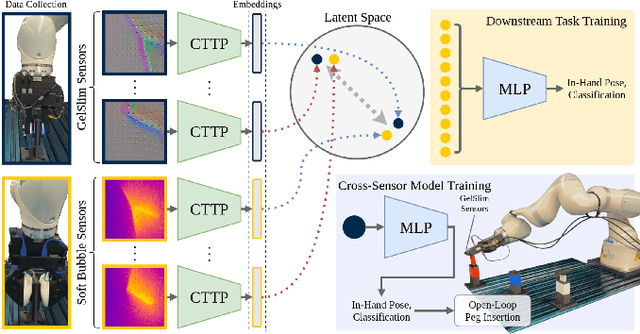
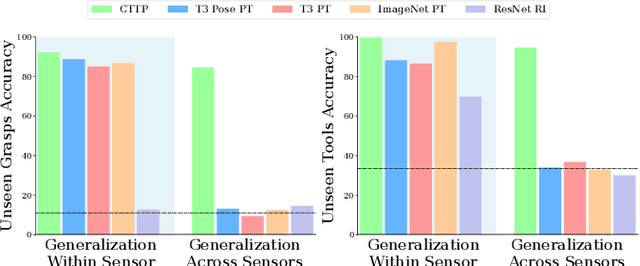
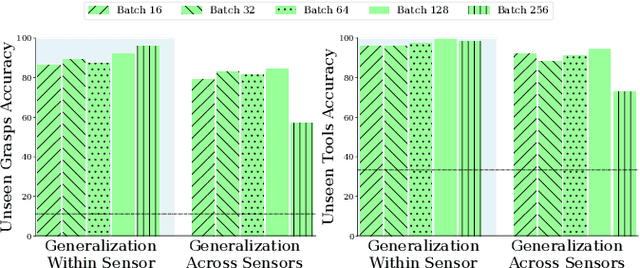

Today's tactile sensors have a variety of different designs, making it challenging to develop general-purpose methods for processing touch signals. In this paper, we learn a unified representation that captures the shared information between different tactile sensors. Unlike current approaches that focus on reconstruction or task-specific supervision, we leverage contrastive learning to integrate tactile signals from two different sensors into a shared embedding space, using a dataset in which the same objects are probed with multiple sensors. We apply this approach to paired touch signals from GelSlim and Soft Bubble sensors. We show that our learned features provide strong pretraining for downstream pose estimation and classification tasks. We also show that our embedding enables models trained using one touch sensor to be deployed using another without additional training. Project details can be found at https://www.mmintlab.com/research/cttp/.
Tactile Functasets: Neural Implicit Representations of Tactile Datasets
Sep 22, 2024
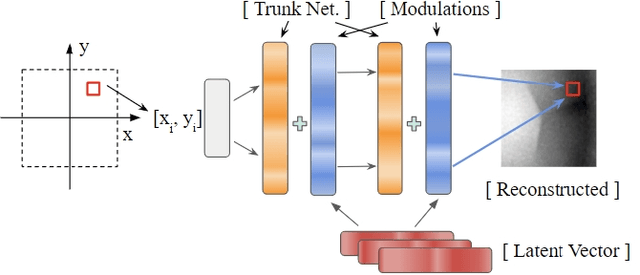

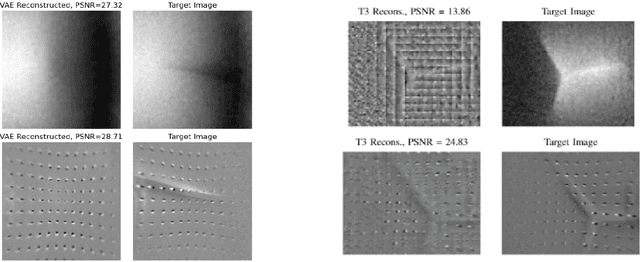
Modern incarnations of tactile sensors produce high-dimensional raw sensory feedback such as images, making it challenging to efficiently store, process, and generalize across sensors. To address these concerns, we introduce a novel implicit function representation for tactile sensor feedback. Rather than directly using raw tactile images, we propose neural implicit functions trained to reconstruct the tactile dataset, producing compact representations that capture the underlying structure of the sensory inputs. These representations offer several advantages over their raw counterparts: they are compact, enable probabilistically interpretable inference, and facilitate generalization across different sensors. We demonstrate the efficacy of this representation on the downstream task of in-hand object pose estimation, achieving improved performance over image-based methods while simplifying downstream models. We release code, demos and datasets at https://www.mmintlab.com/tactile-functasets.
Touch2Touch: Cross-Modal Tactile Generation for Object Manipulation
Sep 12, 2024



Today's touch sensors come in many shapes and sizes. This has made it challenging to develop general-purpose touch processing methods since models are generally tied to one specific sensor design. We address this problem by performing cross-modal prediction between touch sensors: given the tactile signal from one sensor, we use a generative model to estimate how the same physical contact would be perceived by another sensor. This allows us to apply sensor-specific methods to the generated signal. We implement this idea by training a diffusion model to translate between the popular GelSlim and Soft Bubble sensors. As a downstream task, we perform in-hand object pose estimation using GelSlim sensors while using an algorithm that operates only on Soft Bubble signals. The dataset, the code, and additional details can be found at https://www.mmintlab.com/research/touch2touch/.