 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSound of Touch: Active Acoustic Tactile Sensing via String Vibrations
Feb 18, 2026Distributed tactile sensing remains difficult to scale over large areas: dense sensor arrays increase wiring, cost, and fragility, while many alternatives provide limited coverage or miss fast interaction dynamics. We present Sound of Touch, an active acoustic tactile-sensing methodology that uses vibrating tensioned strings as sensing elements. The string is continuously excited electromagnetically, and a small number of pickups (contact microphones) observe spectral changes induced by contact. From short-duration audio signals, our system estimates contact location and normal force, and detects slip. To guide design and interpret the sensing mechanism, we derive a physics-based string-vibration simulator that predicts how contact position and force shift vibration modes. Experiments demonstrate millimeter-scale localization, reliable force estimation, and real-time slip detection. Our contributions are: (i) a lightweight, scalable string-based tactile sensing hardware concept for instrumenting extended robot surfaces; (ii) a physics-grounded simulation and analysis tool for contact-induced spectral shifts; and (iii) a real-time inference pipeline that maps vibration measurements to contact state.
Vib2Move: In-Hand Object Reconfiguration via Fingertip Micro-Vibrations
Jun 12, 2025We introduce Vib2Move, a novel approach for in-hand object reconfiguration that uses fingertip micro-vibrations and gravity to precisely reposition planar objects. Our framework comprises three key innovations. First, we design a vibration-based actuator that dynamically modulates the effective finger-object friction coefficient, effectively emulating changes in gripping force. Second, we derive a sliding motion model for objects clamped in a parallel gripper with two symmetric, variable-friction contact patches. Third, we propose a motion planner that coordinates end-effector finger trajectories and fingertip vibrations to achieve the desired object pose. In real-world trials, Vib2Move consistently yields final positioning errors below 6 mm, demonstrating reliable, high-precision manipulation across a variety of planar objects. For more results and information, please visit https://vib2move.github.io.
Visual-auditory Extrinsic Contact Estimation
Sep 22, 2024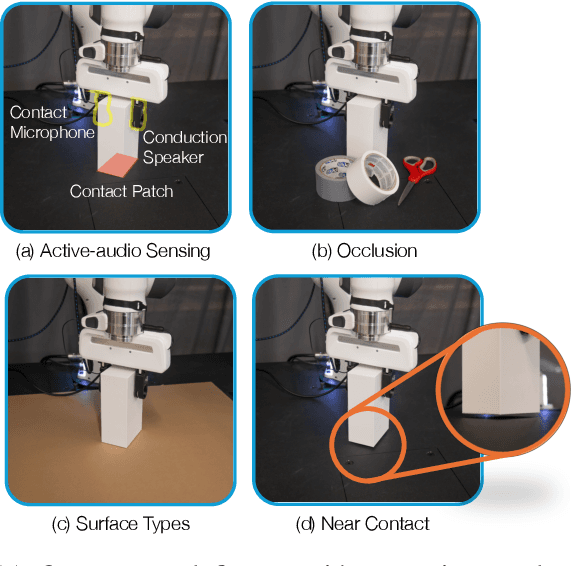
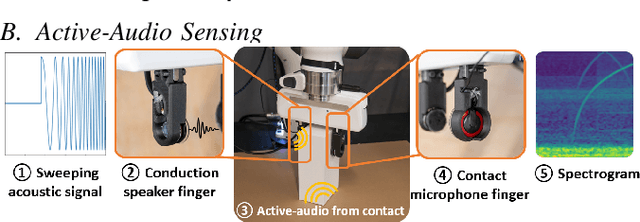
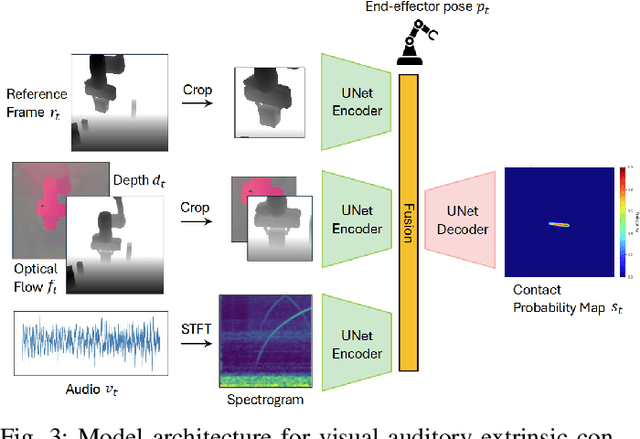
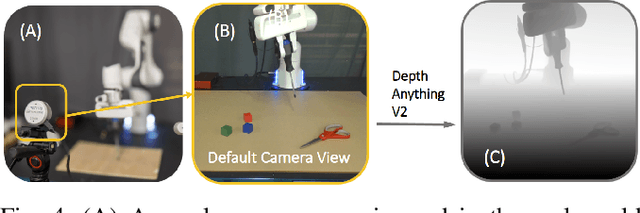
Estimating contact locations between a grasped object and the environment is important for robust manipulation. In this paper, we present a visual-auditory method for extrinsic contact estimation, featuring a real-to-sim approach for auditory signals. Our method equips a robotic manipulator with contact microphones and speakers on its fingers, along with an externally mounted static camera providing a visual feed of the scene. As the robot manipulates objects, it detects contact events with surrounding surfaces using auditory feedback from the fingertips and visual feedback from the camera. A key feature of our approach is the transfer of auditory feedback into a simulated environment, where we learn a multimodal representation that is then applied to real world scenes without additional training. This zero-shot transfer is accurate and robust in estimating contact location and size, as demonstrated in our simulated and real world experiments in various cluttered environments.
Precise Object Sliding with Top Contact via Asymmetric Dual Limit Surfaces
May 23, 2023In this paper, we discuss the mechanics and planning algorithms to slide an object on a horizontal planar surface via frictional patch contact made with its top surface. Here, we propose an asymmetric dual limit surface model to determine slip boundary conditions for both the top and bottom contact. With this model, we obtain a range of twists that can keep the object in sticking contact with the robot end-effector while slipping on the supporting plane. Based on these constraints, we derive a planning algorithm to slide objects with only top contact to arbitrary goal poses without slippage between end effector and the object. We validate the proposed model empirically and demonstrate its predictive accuracy on a variety of object geometries and motions. We also evaluate the planning algorithm over a variety of objects and goals demonstrate an orientation error improvement of 90\% when compared to methods naive to linear path planners.
Lumped-Parameter Modeling and Control for Robotic High-Viscosity Fluid Dispensing in Additive Manufacturing
Oct 19, 2022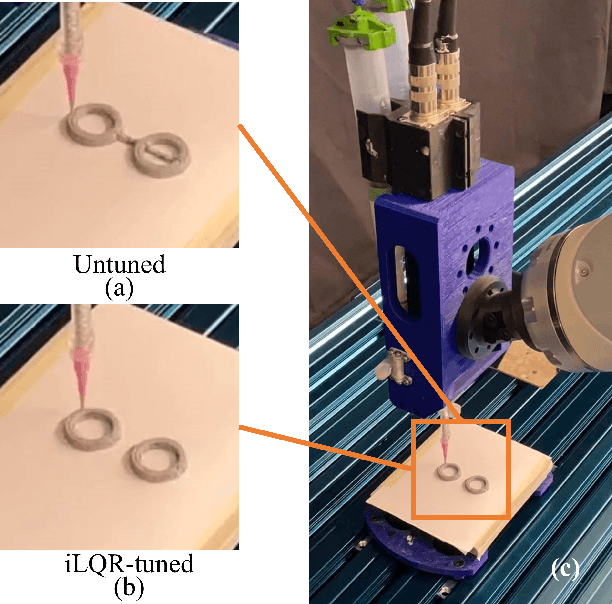
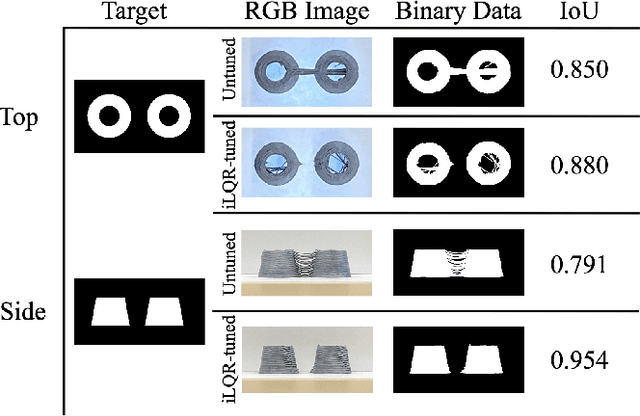
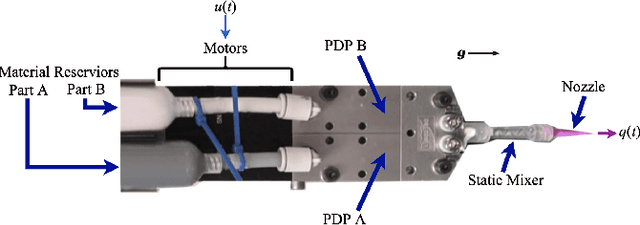
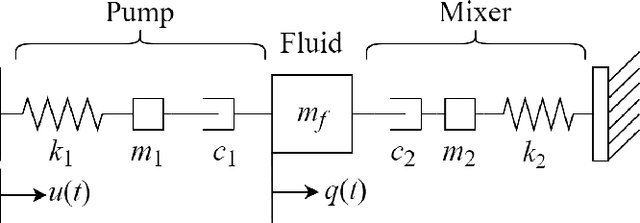
In this paper, we present a novel flow model and compensation strategy for high-viscosity fluid deposition that yields high quality parts in the face of large transient delays and nonlinearity. Robotic high-viscosity fluid deposition is an essential process for a broad range of manufacturing applications including additive manufacturing, adhesive and sealant dispensing, and soft robotics. However, high-viscosity fluid deposition without compensation can lead to poor part quality and defects due to large transient delays and complex fluid dynamics. Our computationally efficient model is well-suited to real-time control and can be quickly calibrated and our compensation strategy leverages an iterative Linear-Quadratic Regulator to compute compensated deposition paths that can be deployed on most dispensing systems, without additional hardware. We demonstrate the improvements provided by our method when 3D printing using a robotic manipulator.