 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNitroGen: An Open Foundation Model for Generalist Gaming Agents
Jan 04, 2026We introduce NitroGen, a vision-action foundation model for generalist gaming agents that is trained on 40,000 hours of gameplay videos across more than 1,000 games. We incorporate three key ingredients: 1) an internet-scale video-action dataset constructed by automatically extracting player actions from publicly available gameplay videos, 2) a multi-game benchmark environment that can measure cross-game generalization, and 3) a unified vision-action model trained with large-scale behavior cloning. NitroGen exhibits strong competence across diverse domains, including combat encounters in 3D action games, high-precision control in 2D platformers, and exploration in procedurally generated worlds. It transfers effectively to unseen games, achieving up to 52% relative improvement in task success rates over models trained from scratch. We release the dataset, evaluation suite, and model weights to advance research on generalist embodied agents.
CHIP: Adaptive Compliance for Humanoid Control through Hindsight Perturbation
Dec 16, 2025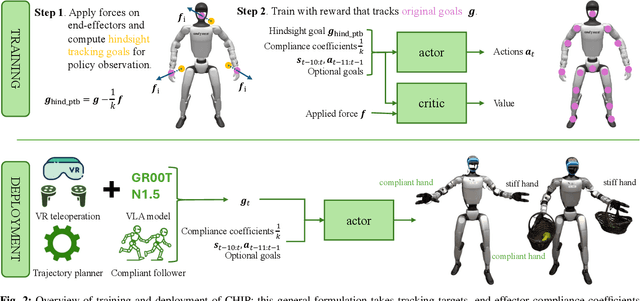
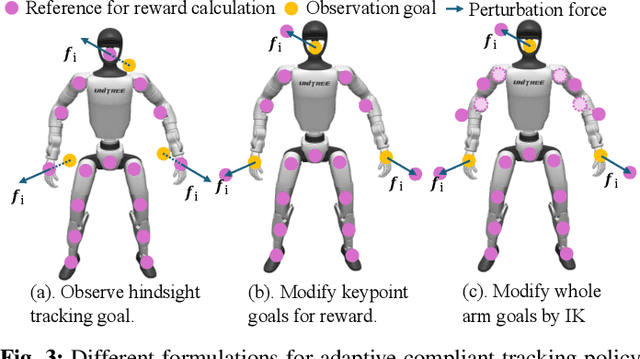
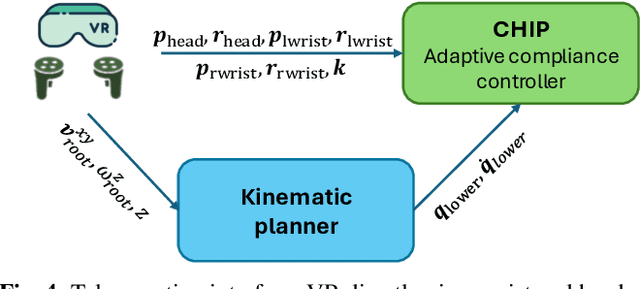
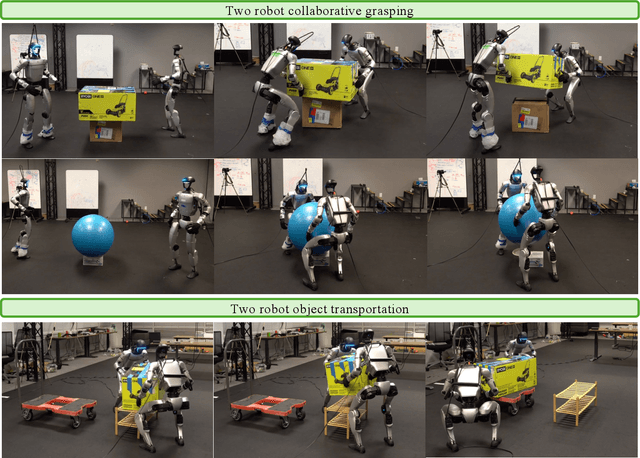
Recent progress in humanoid robots has unlocked agile locomotion skills, including backflipping, running, and crawling. Yet it remains challenging for a humanoid robot to perform forceful manipulation tasks such as moving objects, wiping, and pushing a cart. We propose adaptive Compliance Humanoid control through hIsight Perturbation (CHIP), a plug-and-play module that enables controllable end-effector stiffness while preserving agile tracking of dynamic reference motions. CHIP is easy to implement and requires neither data augmentation nor additional reward tuning. We show that a generalist motion-tracking controller trained with CHIP can perform a diverse set of forceful manipulation tasks that require different end-effector compliance, such as multi-robot collaboration, wiping, box delivery, and door opening.
SONIC: Supersizing Motion Tracking for Natural Humanoid Whole-Body Control
Nov 11, 2025Despite the rise of billion-parameter foundation models trained across thousands of GPUs, similar scaling gains have not been shown for humanoid control. Current neural controllers for humanoids remain modest in size, target a limited behavior set, and are trained on a handful of GPUs over several days. We show that scaling up model capacity, data, and compute yields a generalist humanoid controller capable of creating natural and robust whole-body movements. Specifically, we posit motion tracking as a natural and scalable task for humanoid control, leverageing dense supervision from diverse motion-capture data to acquire human motion priors without manual reward engineering. We build a foundation model for motion tracking by scaling along three axes: network size (from 1.2M to 42M parameters), dataset volume (over 100M frames, 700 hours of high-quality motion data), and compute (9k GPU hours). Beyond demonstrating the benefits of scale, we show the practical utility of our model through two mechanisms: (1) a real-time universal kinematic planner that bridges motion tracking to downstream task execution, enabling natural and interactive control, and (2) a unified token space that supports various motion input interfaces, such as VR teleoperation devices, human videos, and vision-language-action (VLA) models, all using the same policy. Scaling motion tracking exhibits favorable properties: performance improves steadily with increased compute and data diversity, and learned representations generalize to unseen motions, establishing motion tracking at scale as a practical foundation for humanoid control.
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Mar 18, 2025General-purpose robots need a versatile body and an intelligent mind. Recent advancements in humanoid robots have shown great promise as a hardware platform for building generalist autonomy in the human world. A robot foundation model, trained on massive and diverse data sources, is essential for enabling the robots to reason about novel situations, robustly handle real-world variability, and rapidly learn new tasks. To this end, we introduce GR00T N1, an open foundation model for humanoid robots. GR00T N1 is a Vision-Language-Action (VLA) model with a dual-system architecture. The vision-language module (System 2) interprets the environment through vision and language instructions. The subsequent diffusion transformer module (System 1) generates fluid motor actions in real time. Both modules are tightly coupled and jointly trained end-to-end. We train GR00T N1 with a heterogeneous mixture of real-robot trajectories, human videos, and synthetically generated datasets. We show that our generalist robot model GR00T N1 outperforms the state-of-the-art imitation learning baselines on standard simulation benchmarks across multiple robot embodiments. Furthermore, we deploy our model on the Fourier GR-1 humanoid robot for language-conditioned bimanual manipulation tasks, achieving strong performance with high data efficiency.
ASAP: Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills
Feb 03, 2025Humanoid robots hold the potential for unparalleled versatility in performing human-like, whole-body skills. However, achieving agile and coordinated whole-body motions remains a significant challenge due to the dynamics mismatch between simulation and the real world. Existing approaches, such as system identification (SysID) and domain randomization (DR) methods, often rely on labor-intensive parameter tuning or result in overly conservative policies that sacrifice agility. In this paper, we present ASAP (Aligning Simulation and Real-World Physics), a two-stage framework designed to tackle the dynamics mismatch and enable agile humanoid whole-body skills. In the first stage, we pre-train motion tracking policies in simulation using retargeted human motion data. In the second stage, we deploy the policies in the real world and collect real-world data to train a delta (residual) action model that compensates for the dynamics mismatch. Then, ASAP fine-tunes pre-trained policies with the delta action model integrated into the simulator to align effectively with real-world dynamics. We evaluate ASAP across three transfer scenarios: IsaacGym to IsaacSim, IsaacGym to Genesis, and IsaacGym to the real-world Unitree G1 humanoid robot. Our approach significantly improves agility and whole-body coordination across various dynamic motions, reducing tracking error compared to SysID, DR, and delta dynamics learning baselines. ASAP enables highly agile motions that were previously difficult to achieve, demonstrating the potential of delta action learning in bridging simulation and real-world dynamics. These results suggest a promising sim-to-real direction for developing more expressive and agile humanoids.
Cross-Episodic Curriculum for Transformer Agents
Oct 12, 2023We present a new algorithm, Cross-Episodic Curriculum (CEC), to boost the learning efficiency and generalization of Transformer agents. Central to CEC is the placement of cross-episodic experiences into a Transformer's context, which forms the basis of a curriculum. By sequentially structuring online learning trials and mixed-quality demonstrations, CEC constructs curricula that encapsulate learning progression and proficiency increase across episodes. Such synergy combined with the potent pattern recognition capabilities of Transformer models delivers a powerful cross-episodic attention mechanism. The effectiveness of CEC is demonstrated under two representative scenarios: one involving multi-task reinforcement learning with discrete control, such as in DeepMind Lab, where the curriculum captures the learning progression in both individual and progressively complex settings; and the other involving imitation learning with mixed-quality data for continuous control, as seen in RoboMimic, where the curriculum captures the improvement in demonstrators' expertise. In all instances, policies resulting from CEC exhibit superior performance and strong generalization. Code is open-sourced at https://cec-agent.github.io/ to facilitate research on Transformer agent learning.