 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgoScale: Scaling Dexterous Manipulation with Diverse Egocentric Human Data
Feb 18, 2026Human behavior is among the most scalable sources of data for learning physical intelligence, yet how to effectively leverage it for dexterous manipulation remains unclear. While prior work demonstrates human to robot transfer in constrained settings, it is unclear whether large scale human data can support fine grained, high degree of freedom dexterous manipulation. We present EgoScale, a human to dexterous manipulation transfer framework built on large scale egocentric human data. We train a Vision Language Action (VLA) model on over 20,854 hours of action labeled egocentric human video, more than 20 times larger than prior efforts, and uncover a log linear scaling law between human data scale and validation loss. This validation loss strongly correlates with downstream real robot performance, establishing large scale human data as a predictable supervision source. Beyond scale, we introduce a simple two stage transfer recipe: large scale human pretraining followed by lightweight aligned human robot mid training. This enables strong long horizon dexterous manipulation and one shot task adaptation with minimal robot supervision. Our final policy improves average success rate by 54% over a no pretraining baseline using a 22 DoF dexterous robotic hand, and transfers effectively to robots with lower DoF hands, indicating that large scale human motion provides a reusable, embodiment agnostic motor prior.
CHIP: Adaptive Compliance for Humanoid Control through Hindsight Perturbation
Dec 16, 2025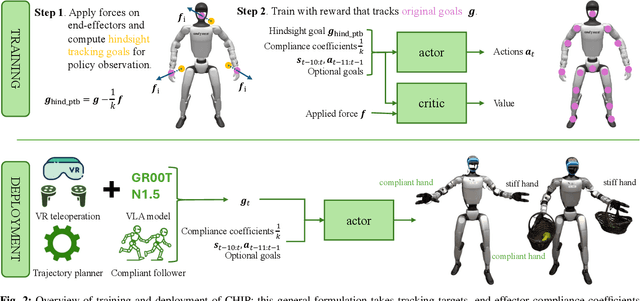
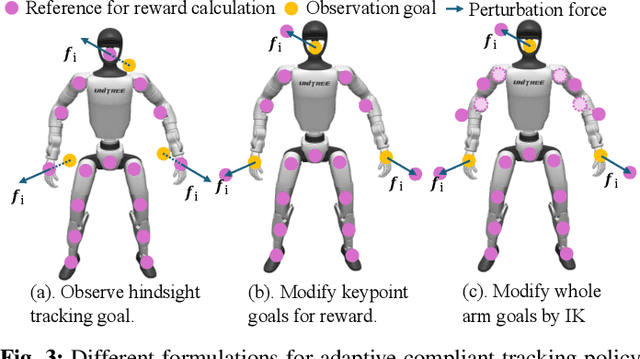
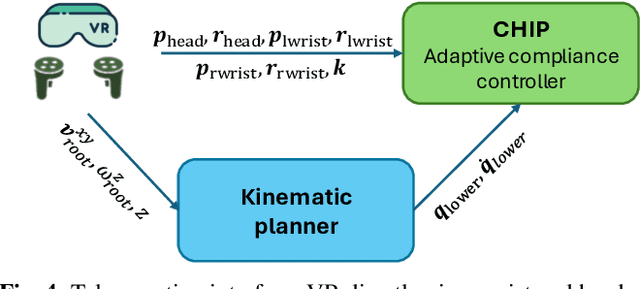
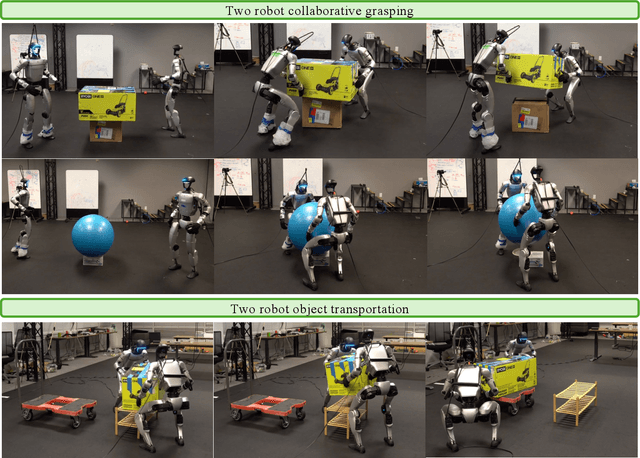
Recent progress in humanoid robots has unlocked agile locomotion skills, including backflipping, running, and crawling. Yet it remains challenging for a humanoid robot to perform forceful manipulation tasks such as moving objects, wiping, and pushing a cart. We propose adaptive Compliance Humanoid control through hIsight Perturbation (CHIP), a plug-and-play module that enables controllable end-effector stiffness while preserving agile tracking of dynamic reference motions. CHIP is easy to implement and requires neither data augmentation nor additional reward tuning. We show that a generalist motion-tracking controller trained with CHIP can perform a diverse set of forceful manipulation tasks that require different end-effector compliance, such as multi-robot collaboration, wiping, box delivery, and door opening.
VIRAL: Visual Sim-to-Real at Scale for Humanoid Loco-Manipulation
Nov 19, 2025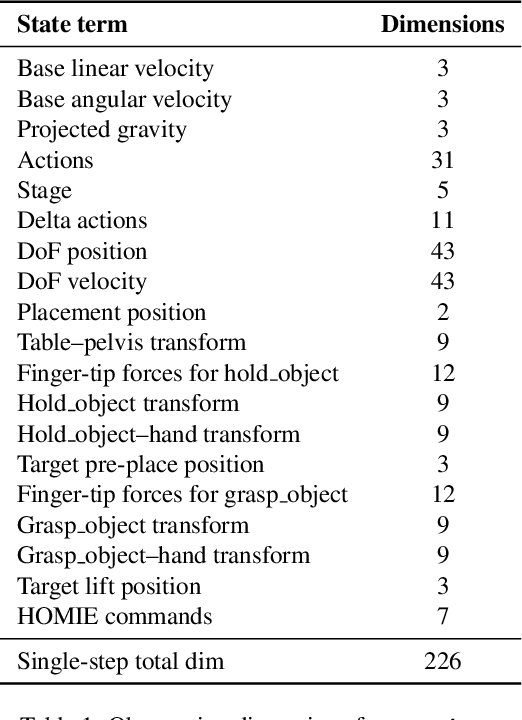
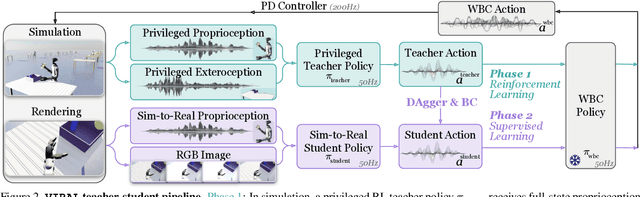
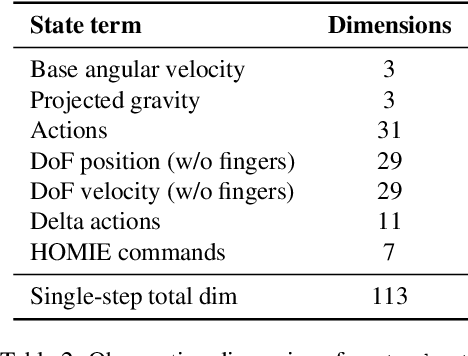
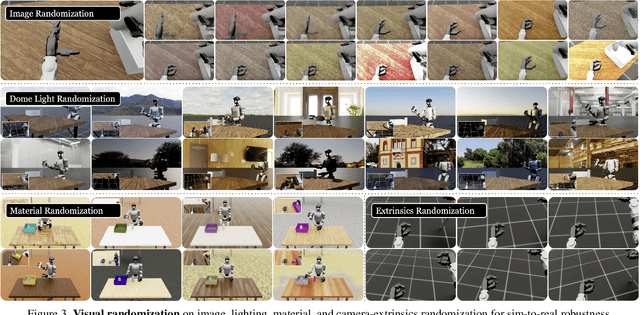
A key barrier to the real-world deployment of humanoid robots is the lack of autonomous loco-manipulation skills. We introduce VIRAL, a visual sim-to-real framework that learns humanoid loco-manipulation entirely in simulation and deploys it zero-shot to real hardware. VIRAL follows a teacher-student design: a privileged RL teacher, operating on full state, learns long-horizon loco-manipulation using a delta action space and reference state initialization. A vision-based student policy is then distilled from the teacher via large-scale simulation with tiled rendering, trained with a mixture of online DAgger and behavior cloning. We find that compute scale is critical: scaling simulation to tens of GPUs (up to 64) makes both teacher and student training reliable, while low-compute regimes often fail. To bridge the sim-to-real gap, VIRAL combines large-scale visual domain randomization over lighting, materials, camera parameters, image quality, and sensor delays--with real-to-sim alignment of the dexterous hands and cameras. Deployed on a Unitree G1 humanoid, the resulting RGB-based policy performs continuous loco-manipulation for up to 54 cycles, generalizing to diverse spatial and appearance variations without any real-world fine-tuning, and approaching expert-level teleoperation performance. Extensive ablations dissect the key design choices required to make RGB-based humanoid loco-manipulation work in practice.
SONIC: Supersizing Motion Tracking for Natural Humanoid Whole-Body Control
Nov 11, 2025Despite the rise of billion-parameter foundation models trained across thousands of GPUs, similar scaling gains have not been shown for humanoid control. Current neural controllers for humanoids remain modest in size, target a limited behavior set, and are trained on a handful of GPUs over several days. We show that scaling up model capacity, data, and compute yields a generalist humanoid controller capable of creating natural and robust whole-body movements. Specifically, we posit motion tracking as a natural and scalable task for humanoid control, leverageing dense supervision from diverse motion-capture data to acquire human motion priors without manual reward engineering. We build a foundation model for motion tracking by scaling along three axes: network size (from 1.2M to 42M parameters), dataset volume (over 100M frames, 700 hours of high-quality motion data), and compute (9k GPU hours). Beyond demonstrating the benefits of scale, we show the practical utility of our model through two mechanisms: (1) a real-time universal kinematic planner that bridges motion tracking to downstream task execution, enabling natural and interactive control, and (2) a unified token space that supports various motion input interfaces, such as VR teleoperation devices, human videos, and vision-language-action (VLA) models, all using the same policy. Scaling motion tracking exhibits favorable properties: performance improves steadily with increased compute and data diversity, and learned representations generalize to unseen motions, establishing motion tracking at scale as a practical foundation for humanoid control.
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Mar 18, 2025General-purpose robots need a versatile body and an intelligent mind. Recent advancements in humanoid robots have shown great promise as a hardware platform for building generalist autonomy in the human world. A robot foundation model, trained on massive and diverse data sources, is essential for enabling the robots to reason about novel situations, robustly handle real-world variability, and rapidly learn new tasks. To this end, we introduce GR00T N1, an open foundation model for humanoid robots. GR00T N1 is a Vision-Language-Action (VLA) model with a dual-system architecture. The vision-language module (System 2) interprets the environment through vision and language instructions. The subsequent diffusion transformer module (System 1) generates fluid motor actions in real time. Both modules are tightly coupled and jointly trained end-to-end. We train GR00T N1 with a heterogeneous mixture of real-robot trajectories, human videos, and synthetically generated datasets. We show that our generalist robot model GR00T N1 outperforms the state-of-the-art imitation learning baselines on standard simulation benchmarks across multiple robot embodiments. Furthermore, we deploy our model on the Fourier GR-1 humanoid robot for language-conditioned bimanual manipulation tasks, achieving strong performance with high data efficiency.
Constraint-Guided Online Data Selection for Scalable Data-Driven Safety Filters in Uncertain Robotic Systems
Nov 23, 2023As the use of autonomous robotic systems expands in tasks that are complex and challenging to model, the demand for robust data-driven control methods that can certify safety and stability in uncertain conditions is increasing. However, the practical implementation of these methods often faces scalability issues due to the growing amount of data points with system complexity, and a significant reliance on high-quality training data. In response to these challenges, this study presents a scalable data-driven controller that efficiently identifies and infers from the most informative data points for implementing data-driven safety filters. Our approach is grounded in the integration of a model-based certificate function-based method and Gaussian Process (GP) regression, reinforced by a novel online data selection algorithm that reduces time complexity from quadratic to linear relative to dataset size. Empirical evidence, gathered from successful real-world cart-pole swing-up experiments and simulated locomotion of a five-link bipedal robot, demonstrates the efficacy of our approach. Our findings reveal that our efficient online data selection algorithm, which strategically selects key data points, enhances the practicality and efficiency of data-driven certifying filters in complex robotic systems, significantly mitigating scalability concerns inherent in nonparametric learning-based control methods.
In-Distribution Barrier Functions: Self-Supervised Policy Filters that Avoid Out-of-Distribution States
Jan 27, 2023Learning-based control approaches have shown great promise in performing complex tasks directly from high-dimensional perception data for real robotic systems. Nonetheless, the learned controllers can behave unexpectedly if the trajectories of the system divert from the training data distribution, which can compromise safety. In this work, we propose a control filter that wraps any reference policy and effectively encourages the system to stay in-distribution with respect to offline-collected safe demonstrations. Our methodology is inspired by Control Barrier Functions (CBFs), which are model-based tools from the nonlinear control literature that can be used to construct minimally invasive safe policy filters. While existing methods based on CBFs require a known low-dimensional state representation, our proposed approach is directly applicable to systems that rely solely on high-dimensional visual observations by learning in a latent state-space. We demonstrate that our method is effective for two different visuomotor control tasks in simulation environments, including both top-down and egocentric view settings.
Probabilistic Safe Online Learning with Control Barrier Functions
Aug 23, 2022

Learning-based control schemes have recently shown great efficacy performing complex tasks. However, in order to deploy them in real systems, it is of vital importance to guarantee that the system will remain safe during online training and execution. We therefore need safe online learning frameworks able to autonomously reason about whether the current information at their disposal is enough to ensure safety or, in contrast, new measurements are required. In this paper, we present a framework consisting of two parts: first, an out-of-distribution detection mechanism actively collecting measurements when needed to guarantee that at least one safety backup direction is always available for use; and second, a Gaussian Process-based probabilistic safety-critical controller that ensures the system stays safe at all times with high probability. Our method exploits model knowledge through the use of Control Barrier Functions, and collects measurements from the stream of online data in an event-triggered fashion to guarantee recursive feasibility of the learned safety-critical controller. This, in turn, allows us to provide formal results of forward invariance of a safe set with high probability, even in a priori unexplored regions. Finally, we validate the proposed framework in numerical simulations of an adaptive cruise control system.
Pointwise Feasibility of Gaussian Process-based Safety-Critical Control under Model Uncertainty
Jun 13, 2021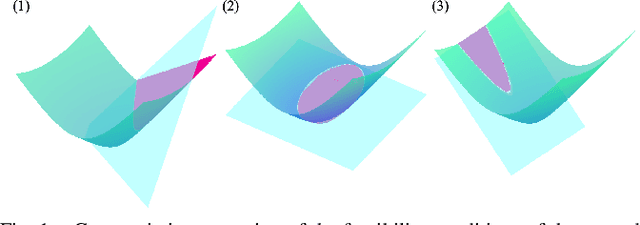
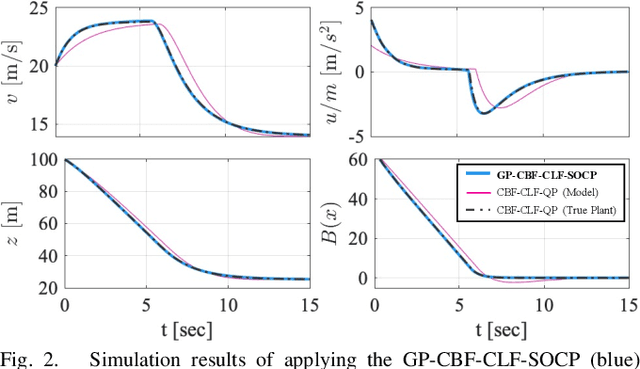
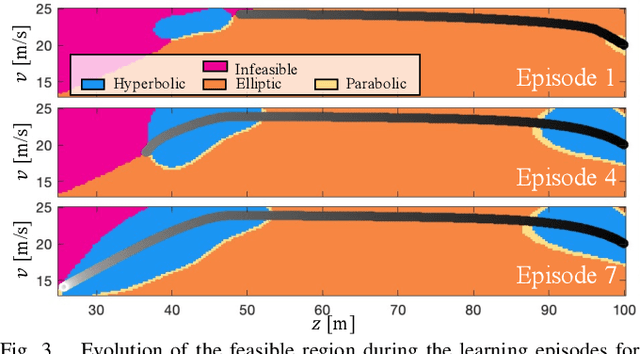
Control Barrier Functions (CBFs) and Control Lyapunov Functions (CLFs) are popular tools for enforcing safety and stability of a controlled system, respectively. They are commonly utilized to build constraints that can be incorporated in a min-norm quadratic program (CBF-CLF-QP) which solves for a safety-critical control input. However, since these constraints rely on a model of the system, when this model is inaccurate the guarantees of safety and stability can be easily lost. In this paper, we present a Gaussian Process (GP)-based approach to tackle the problem of model uncertainty in safety-critical controllers that use CBFs and CLFs. The considered model uncertainty is affected by both state and control input. We derive probabilistic bounds on the effects that such model uncertainty has on the dynamics of the CBF and CLF. Then, we use these bounds to build safety and stability chance constraints that can be incorporated in a min-norm convex optimization program, called GP-CBF-CLF-SOCP. As the main theoretical result of the paper, we present necessary and sufficient conditions for pointwise feasibility of the proposed optimization problem. We believe that these conditions could serve as a starting point towards understanding what are the minimal requirements on the distribution of data collected from the real system in order to guarantee safety. Finally, we validate the proposed framework with numerical simulations of an adaptive cruise controller for an automotive system.
Gaussian Process-based Min-norm Stabilizing Controller for Control-Affine Systems with Uncertain Input Effects
Nov 14, 2020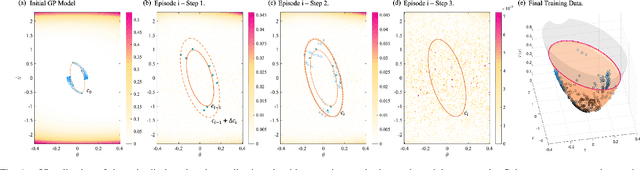
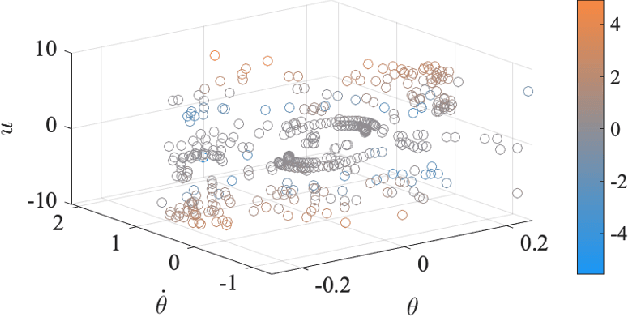
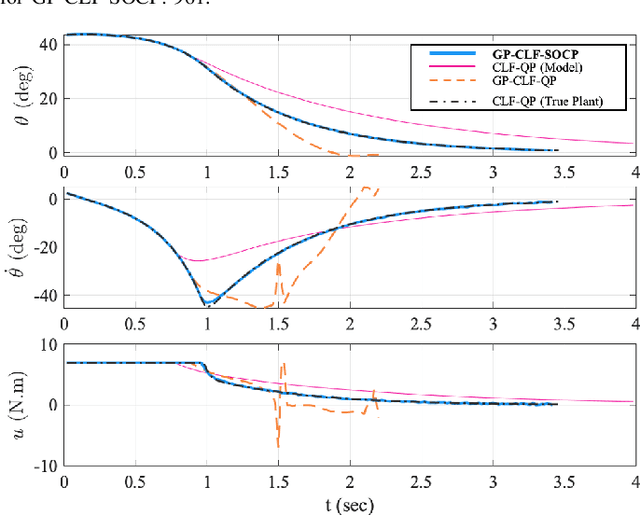
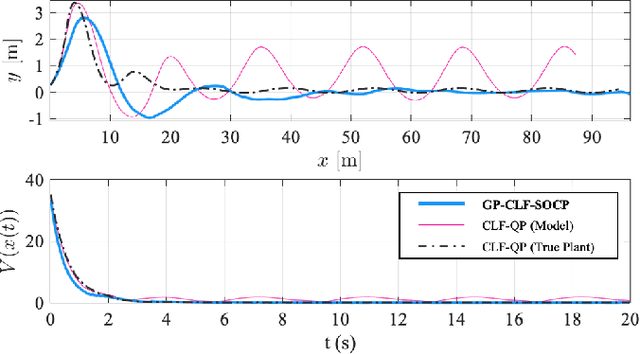
This paper presents a method to design a min-norm Control Lyapunov Function (CLF)-based stabilizing controller for a control-affine system with uncertain dynamics using Gaussian Process (GP) regression. We propose a novel compound kernel that captures the control-affine nature of the problem, which permits the estimation of both state and input-dependent model uncertainty in a single GP regression problem. Furthermore, we provide probabilistic guarantees of convergence by the use of GP Upper Confidence Bound analysis and the formulation of a CLF-based stability chance constraint which can be incorporated in a min-norm optimization problem. We show that this resulting optimization problem is convex, and we call it Gaussian Process-based Control Lyapunov Function Second-Order Cone Program (GP-CLF-SOCP). The data-collection process and the training of the GP regression model are carried out in an episodic learning fashion. We validate the proposed algorithm and controller in numerical simulations of an inverted pendulum and a kinematic bicycle model, resulting in stable trajectories which are very similar to the ones obtained if we actually knew the true plant dynamics.