 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFLARE: Robot Learning with Implicit World Modeling
May 21, 2025We introduce $\textbf{F}$uture $\textbf{LA}$tent $\textbf{RE}$presentation Alignment ($\textbf{FLARE}$), a novel framework that integrates predictive latent world modeling into robot policy learning. By aligning features from a diffusion transformer with latent embeddings of future observations, $\textbf{FLARE}$ enables a diffusion transformer policy to anticipate latent representations of future observations, allowing it to reason about long-term consequences while generating actions. Remarkably lightweight, $\textbf{FLARE}$ requires only minimal architectural modifications -- adding a few tokens to standard vision-language-action (VLA) models -- yet delivers substantial performance gains. Across two challenging multitask simulation imitation learning benchmarks spanning single-arm and humanoid tabletop manipulation, $\textbf{FLARE}$ achieves state-of-the-art performance, outperforming prior policy learning baselines by up to 26%. Moreover, $\textbf{FLARE}$ unlocks the ability to co-train with human egocentric video demonstrations without action labels, significantly boosting policy generalization to a novel object with unseen geometry with as few as a single robot demonstration. Our results establish $\textbf{FLARE}$ as a general and scalable approach for combining implicit world modeling with high-frequency robotic control.
DreamGen: Unlocking Generalization in Robot Learning through Neural Trajectories
May 19, 2025We introduce DreamGen, a simple yet highly effective 4-stage pipeline for training robot policies that generalize across behaviors and environments through neural trajectories - synthetic robot data generated from video world models. DreamGen leverages state-of-the-art image-to-video generative models, adapting them to the target robot embodiment to produce photorealistic synthetic videos of familiar or novel tasks in diverse environments. Since these models generate only videos, we recover pseudo-action sequences using either a latent action model or an inverse-dynamics model (IDM). Despite its simplicity, DreamGen unlocks strong behavior and environment generalization: a humanoid robot can perform 22 new behaviors in both seen and unseen environments, while requiring teleoperation data from only a single pick-and-place task in one environment. To evaluate the pipeline systematically, we introduce DreamGen Bench, a video generation benchmark that shows a strong correlation between benchmark performance and downstream policy success. Our work establishes a promising new axis for scaling robot learning well beyond manual data collection.
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Mar 18, 2025General-purpose robots need a versatile body and an intelligent mind. Recent advancements in humanoid robots have shown great promise as a hardware platform for building generalist autonomy in the human world. A robot foundation model, trained on massive and diverse data sources, is essential for enabling the robots to reason about novel situations, robustly handle real-world variability, and rapidly learn new tasks. To this end, we introduce GR00T N1, an open foundation model for humanoid robots. GR00T N1 is a Vision-Language-Action (VLA) model with a dual-system architecture. The vision-language module (System 2) interprets the environment through vision and language instructions. The subsequent diffusion transformer module (System 1) generates fluid motor actions in real time. Both modules are tightly coupled and jointly trained end-to-end. We train GR00T N1 with a heterogeneous mixture of real-robot trajectories, human videos, and synthetically generated datasets. We show that our generalist robot model GR00T N1 outperforms the state-of-the-art imitation learning baselines on standard simulation benchmarks across multiple robot embodiments. Furthermore, we deploy our model on the Fourier GR-1 humanoid robot for language-conditioned bimanual manipulation tasks, achieving strong performance with high data efficiency.
Magma: A Foundation Model for Multimodal AI Agents
Feb 18, 2025We present Magma, a foundation model that serves multimodal AI agentic tasks in both the digital and physical worlds. Magma is a significant extension of vision-language (VL) models in that it not only retains the VL understanding ability (verbal intelligence) of the latter, but is also equipped with the ability to plan and act in the visual-spatial world (spatial-temporal intelligence) and complete agentic tasks ranging from UI navigation to robot manipulation. To endow the agentic capabilities, Magma is pretrained on large amounts of heterogeneous datasets spanning from images, videos to robotics data, where the actionable visual objects (e.g., clickable buttons in GUI) in images are labeled by Set-of-Mark (SoM) for action grounding, and the object movements (e.g., the trace of human hands or robotic arms) in videos are labeled by Trace-of-Mark (ToM) for action planning. Extensive experiments show that SoM and ToM reach great synergy and facilitate the acquisition of spatial-temporal intelligence for our Magma model, which is fundamental to a wide range of tasks as shown in Fig.1. In particular, Magma creates new state-of-the-art results on UI navigation and robotic manipulation tasks, outperforming previous models that are specifically tailored to these tasks. On image and video-related multimodal tasks, Magma also compares favorably to popular large multimodal models that are trained on much larger datasets. We make our model and code public for reproducibility at https://microsoft.github.io/Magma.
HAMSTER: Hierarchical Action Models For Open-World Robot Manipulation
Feb 08, 2025



Large foundation models have shown strong open-world generalization to complex problems in vision and language, but similar levels of generalization have yet to be achieved in robotics. One fundamental challenge is the lack of robotic data, which are typically obtained through expensive on-robot operation. A promising remedy is to leverage cheaper, off-domain data such as action-free videos, hand-drawn sketches or simulation data. In this work, we posit that hierarchical vision-language-action (VLA) models can be more effective in utilizing off-domain data than standard monolithic VLA models that directly finetune vision-language models (VLMs) to predict actions. In particular, we study a class of hierarchical VLA models, where the high-level VLM is finetuned to produce a coarse 2D path indicating the desired robot end-effector trajectory given an RGB image and a task description. The intermediate 2D path prediction is then served as guidance to the low-level, 3D-aware control policy capable of precise manipulation. Doing so alleviates the high-level VLM from fine-grained action prediction, while reducing the low-level policy's burden on complex task-level reasoning. We show that, with the hierarchical design, the high-level VLM can transfer across significant domain gaps between the off-domain finetuning data and real-robot testing scenarios, including differences on embodiments, dynamics, visual appearances and task semantics, etc. In the real-robot experiments, we observe an average of 20% improvement in success rate across seven different axes of generalization over OpenVLA, representing a 50% relative gain. Visual results are provided at: https://hamster-robot.github.io/
GRAPE: Generalizing Robot Policy via Preference Alignment
Nov 28, 2024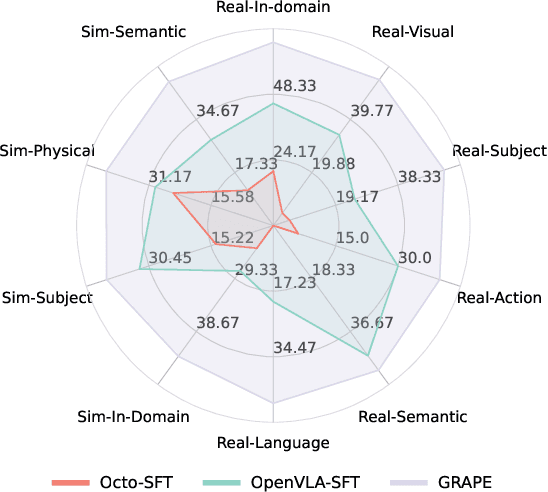

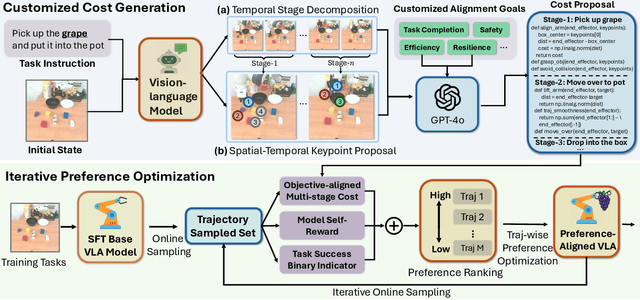
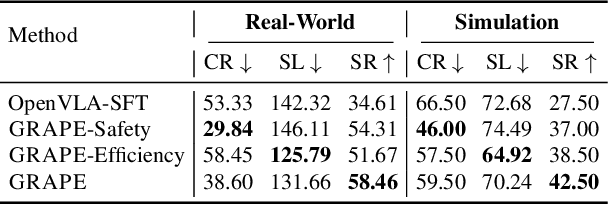
Despite the recent advancements of vision-language-action (VLA) models on a variety of robotics tasks, they suffer from critical issues such as poor generalizability to unseen tasks, due to their reliance on behavior cloning exclusively from successful rollouts. Furthermore, they are typically fine-tuned to replicate demonstrations collected by experts under different settings, thus introducing distribution bias and limiting their adaptability to diverse manipulation objectives, such as efficiency, safety, and task completion. To bridge this gap, we introduce GRAPE: Generalizing Robot Policy via Preference Alignment. Specifically, GRAPE aligns VLAs on a trajectory level and implicitly models reward from both successful and failure trials to boost generalizability to diverse tasks. Moreover, GRAPE breaks down complex manipulation tasks to independent stages and automatically guides preference modeling through customized spatiotemporal constraints with keypoints proposed by a large vision-language model. Notably, these constraints are flexible and can be customized to align the model with varying objectives, such as safety, efficiency, or task success. We evaluate GRAPE across a diverse array of tasks in both real-world and simulated environments. Experimental results demonstrate that GRAPE enhances the performance of state-of-the-art VLA models, increasing success rates on in-domain and unseen manipulation tasks by 51.79% and 60.36%, respectively. Additionally, GRAPE can be aligned with various objectives, such as safety and efficiency, reducing collision rates by 44.31% and rollout step-length by 11.15%, respectively. All code, models, and data are available at https://grape-vla.github.io/
Latent Action Pretraining from Videos
Oct 15, 2024



We introduce Latent Action Pretraining for general Action models (LAPA), an unsupervised method for pretraining Vision-Language-Action (VLA) models without ground-truth robot action labels. Existing Vision-Language-Action models require action labels typically collected by human teleoperators during pretraining, which significantly limits possible data sources and scale. In this work, we propose a method to learn from internet-scale videos that do not have robot action labels. We first train an action quantization model leveraging VQ-VAE-based objective to learn discrete latent actions between image frames, then pretrain a latent VLA model to predict these latent actions from observations and task descriptions, and finally finetune the VLA on small-scale robot manipulation data to map from latent to robot actions. Experimental results demonstrate that our method significantly outperforms existing techniques that train robot manipulation policies from large-scale videos. Furthermore, it outperforms the state-of-the-art VLA model trained with robotic action labels on real-world manipulation tasks that require language conditioning, generalization to unseen objects, and semantic generalization to unseen instructions. Training only on human manipulation videos also shows positive transfer, opening up the potential for leveraging web-scale data for robotics foundation model.
Knowledge Entropy Decay during Language Model Pretraining Hinders New Knowledge Acquisition
Oct 02, 2024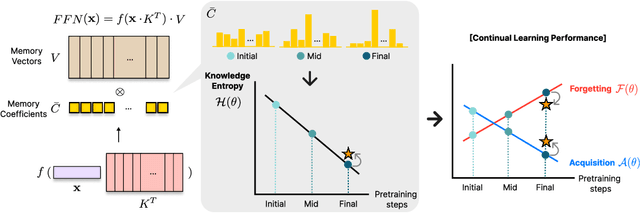
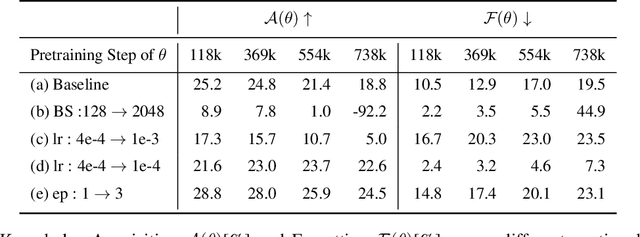
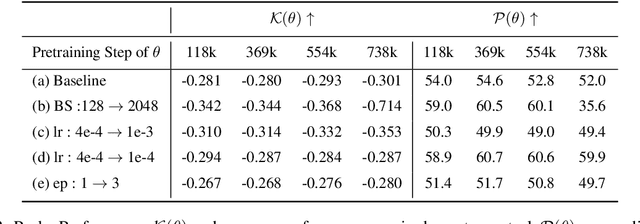
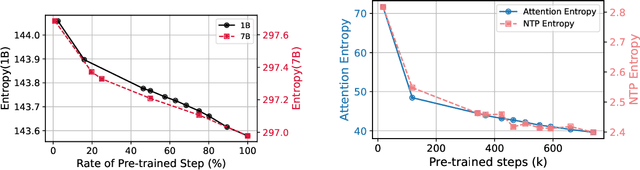
In this work, we investigate how a model's tendency to broadly integrate its parametric knowledge evolves throughout pretraining, and how this behavior affects overall performance, particularly in terms of knowledge acquisition and forgetting. We introduce the concept of knowledge entropy, which quantifies the range of memory sources the model engages with; high knowledge entropy indicates that the model utilizes a wide range of memory sources, while low knowledge entropy suggests reliance on specific sources with greater certainty. Our analysis reveals a consistent decline in knowledge entropy as pretraining advances. We also find that the decline is closely associated with a reduction in the model's ability to acquire and retain knowledge, leading us to conclude that diminishing knowledge entropy (smaller number of active memory sources) impairs the model's knowledge acquisition and retention capabilities. We find further support for this by demonstrating that increasing the activity of inactive memory sources enhances the model's capacity for knowledge acquisition and retention.
The BiGGen Bench: A Principled Benchmark for Fine-grained Evaluation of Language Models with Language Models
Jun 09, 2024



As language models (LMs) become capable of handling a wide range of tasks, their evaluation is becoming as challenging as their development. Most generation benchmarks currently assess LMs using abstract evaluation criteria like helpfulness and harmlessness, which often lack the flexibility and granularity of human assessment. Additionally, these benchmarks tend to focus disproportionately on specific capabilities such as instruction following, leading to coverage bias. To overcome these limitations, we introduce the BiGGen Bench, a principled generation benchmark designed to thoroughly evaluate nine distinct capabilities of LMs across 77 diverse tasks. A key feature of the BiGGen Bench is its use of instance-specific evaluation criteria, closely mirroring the nuanced discernment of human evaluation. We apply this benchmark to assess 103 frontier LMs using five evaluator LMs. Our code, data, and evaluation results are all publicly available at https://github.com/prometheus-eval/prometheus-eval/tree/main/BiGGen-Bench.
Semiparametric Token-Sequence Co-Supervision
Mar 14, 2024



In this work, we introduce a semiparametric token-sequence co-supervision training method. It trains a language model by simultaneously leveraging supervision from the traditional next token prediction loss which is calculated over the parametric token embedding space and the next sequence prediction loss which is calculated over the nonparametric sequence embedding space. The nonparametric sequence embedding space is constructed by a separate language model tasked to condense an input text into a single representative embedding. Our experiments demonstrate that a model trained via both supervisions consistently surpasses models trained via each supervision independently. Analysis suggests that this co-supervision encourages a broader generalization capability across the model. Especially, the robustness of parametric token space which is established during the pretraining step tends to effectively enhance the stability of nonparametric sequence embedding space, a new space established by another language model.