 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTele-Catch: Adaptive Teleoperation for Dexterous Dynamic 3D Object Catching
Mar 30, 2026Teleoperation is a key paradigm for transferring human dexterity to robots, yet most prior work targets objects that are initially static, such as grasping or manipulation. Dynamic object catch, where objects move before contact, remains underexplored. Pure teleoperation in this task often fails due to timing, pose, and force errors, highlighting the need for shared autonomy that combines human input with autonomous policies. To this end, we present Tele-Catch, a systematic framework for dexterous hand teleoperation in dynamic object catching. At its core, we design DAIM, a dynamics-aware adaptive integration mechanism that realizes shared autonomy by fusing glove-based teleoperation signals into the diffusion policy denoising process. It adaptively modulates control based on the interaction object state. To improve policy robustness, we introduce DP-U3R, which integrates unsupervised geometric representations from point cloud observations into diffusion policy learning, enabling geometry-aware decision making. Extensive experiments demonstrate that Tele-Catch significantly improves accuracy and robustness in dynamic catching tasks, while also exhibiting consistent gains across distinct dexterous hand embodiments and previously unseen object categories.
Gallant: Voxel Grid-based Humanoid Locomotion and Local-navigation across 3D Constrained Terrains
Nov 18, 2025Robust humanoid locomotion requires accurate and globally consistent perception of the surrounding 3D environment. However, existing perception modules, mainly based on depth images or elevation maps, offer only partial and locally flattened views of the environment, failing to capture the full 3D structure. This paper presents Gallant, a voxel-grid-based framework for humanoid locomotion and local navigation in 3D constrained terrains. It leverages voxelized LiDAR data as a lightweight and structured perceptual representation, and employs a z-grouped 2D CNN to map this representation to the control policy, enabling fully end-to-end optimization. A high-fidelity LiDAR simulation that dynamically generates realistic observations is developed to support scalable, LiDAR-based training and ensure sim-to-real consistency. Experimental results show that Gallant's broader perceptual coverage facilitates the use of a single policy that goes beyond the limitations of previous methods confined to ground-level obstacles, extending to lateral clutter, overhead constraints, multi-level structures, and narrow passages. Gallant also firstly achieves near 100% success rates in challenging scenarios such as stair climbing and stepping onto elevated platforms through improved end-to-end optimization.
ManipTrans: Efficient Dexterous Bimanual Manipulation Transfer via Residual Learning
Mar 27, 2025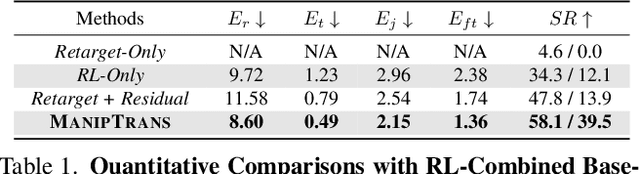
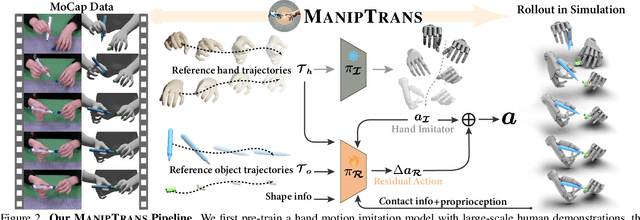
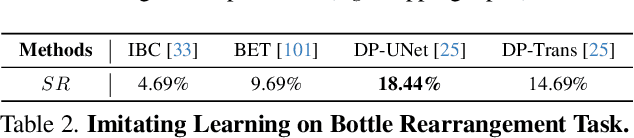
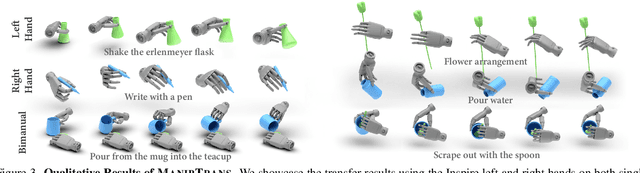
Human hands play a central role in interacting, motivating increasing research in dexterous robotic manipulation. Data-driven embodied AI algorithms demand precise, large-scale, human-like manipulation sequences, which are challenging to obtain with conventional reinforcement learning or real-world teleoperation. To address this, we introduce ManipTrans, a novel two-stage method for efficiently transferring human bimanual skills to dexterous robotic hands in simulation. ManipTrans first pre-trains a generalist trajectory imitator to mimic hand motion, then fine-tunes a specific residual module under interaction constraints, enabling efficient learning and accurate execution of complex bimanual tasks. Experiments show that ManipTrans surpasses state-of-the-art methods in success rate, fidelity, and efficiency. Leveraging ManipTrans, we transfer multiple hand-object datasets to robotic hands, creating DexManipNet, a large-scale dataset featuring previously unexplored tasks like pen capping and bottle unscrewing. DexManipNet comprises 3.3K episodes of robotic manipulation and is easily extensible, facilitating further policy training for dexterous hands and enabling real-world deployments.
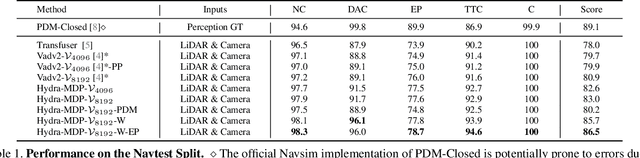
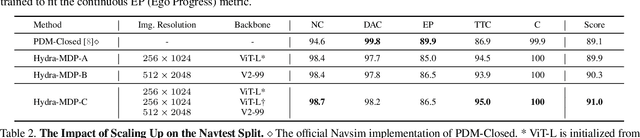
Hydra-MDP++: Advancing End-to-End Driving via Expert-Guided Hydra-Distillation
Mar 17, 2025Hydra-MDP++ introduces a novel teacher-student knowledge distillation framework with a multi-head decoder that learns from human demonstrations and rule-based experts. Using a lightweight ResNet-34 network without complex components, the framework incorporates expanded evaluation metrics, including traffic light compliance (TL), lane-keeping ability (LK), and extended comfort (EC) to address unsafe behaviors not captured by traditional NAVSIM-derived teachers. Like other end-to-end autonomous driving approaches, \hydra processes raw images directly without relying on privileged perception signals. Hydra-MDP++ achieves state-of-the-art performance by integrating these components with a 91.0% drive score on NAVSIM through scaling to a V2-99 image encoder, demonstrating its effectiveness in handling diverse driving scenarios while maintaining computational efficiency.
Hydra-MDP: End-to-end Multimodal Planning with Multi-target Hydra-Distillation
Jun 11, 2024
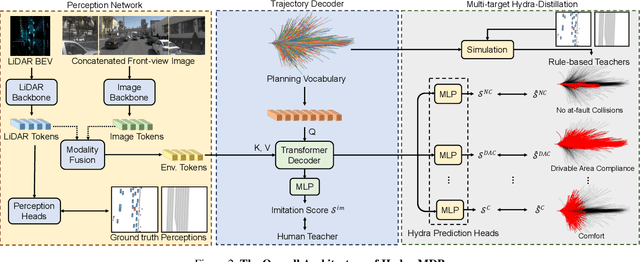
We propose Hydra-MDP, a novel paradigm employing multiple teachers in a teacher-student model. This approach uses knowledge distillation from both human and rule-based teachers to train the student model, which features a multi-head decoder to learn diverse trajectory candidates tailored to various evaluation metrics. With the knowledge of rule-based teachers, Hydra-MDP learns how the environment influences the planning in an end-to-end manner instead of resorting to non-differentiable post-processing. This method achieves the $1^{st}$ place in the Navsim challenge, demonstrating significant improvements in generalization across diverse driving environments and conditions. Code will be available at \url{https://github.com/woxihuanjiangguo/Hydra-MDP}
SemGrasp: Semantic Grasp Generation via Language Aligned Discretization
Apr 04, 2024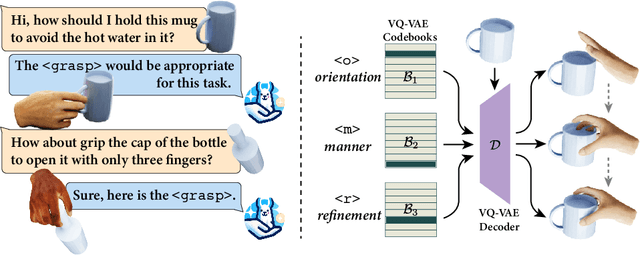
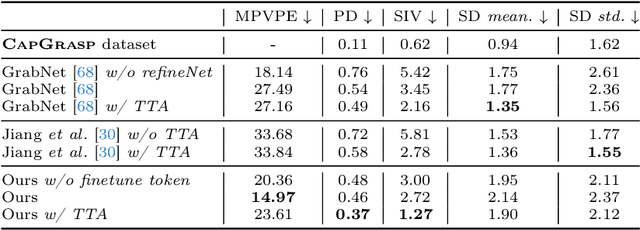
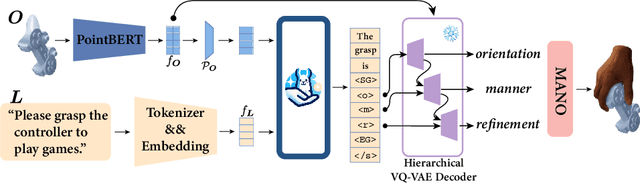

Generating natural human grasps necessitates consideration of not just object geometry but also semantic information. Solely depending on object shape for grasp generation confines the applications of prior methods in downstream tasks. This paper presents a novel semantic-based grasp generation method, termed SemGrasp, which generates a static human grasp pose by incorporating semantic information into the grasp representation. We introduce a discrete representation that aligns the grasp space with semantic space, enabling the generation of grasp postures in accordance with language instructions. A Multimodal Large Language Model (MLLM) is subsequently fine-tuned, integrating object, grasp, and language within a unified semantic space. To facilitate the training of SemGrasp, we have compiled a large-scale, grasp-text-aligned dataset named CapGrasp, featuring about 260k detailed captions and 50k diverse grasps. Experimental findings demonstrate that SemGrasp efficiently generates natural human grasps in alignment with linguistic intentions. Our code, models, and dataset are available publicly at: https://kailinli.github.io/SemGrasp.
OAKINK2: A Dataset of Bimanual Hands-Object Manipulation in Complex Task Completion
Mar 28, 2024



We present OAKINK2, a dataset of bimanual object manipulation tasks for complex daily activities. In pursuit of constructing the complex tasks into a structured representation, OAKINK2 introduces three level of abstraction to organize the manipulation tasks: Affordance, Primitive Task, and Complex Task. OAKINK2 features on an object-centric perspective for decoding the complex tasks, treating them as a sequence of object affordance fulfillment. The first level, Affordance, outlines the functionalities that objects in the scene can afford, the second level, Primitive Task, describes the minimal interaction units that humans interact with the object to achieve its affordance, and the third level, Complex Task, illustrates how Primitive Tasks are composed and interdependent. OAKINK2 dataset provides multi-view image streams and precise pose annotations for the human body, hands and various interacting objects. This extensive collection supports applications such as interaction reconstruction and motion synthesis. Based on the 3-level abstraction of OAKINK2, we explore a task-oriented framework for Complex Task Completion (CTC). CTC aims to generate a sequence of bimanual manipulation to achieve task objectives. Within the CTC framework, we employ Large Language Models (LLMs) to decompose the complex task objectives into sequences of Primitive Tasks and have developed a Motion Fulfillment Model that generates bimanual hand motion for each Primitive Task. OAKINK2 datasets and models are available at https://oakink.net/v2.
CHORD: Category-level Hand-held Object Reconstruction via Shape Deformation
Aug 21, 2023



In daily life, humans utilize hands to manipulate objects. Modeling the shape of objects that are manipulated by the hand is essential for AI to comprehend daily tasks and to learn manipulation skills. However, previous approaches have encountered difficulties in reconstructing the precise shapes of hand-held objects, primarily owing to a deficiency in prior shape knowledge and inadequate data for training. As illustrated, given a particular type of tool, such as a mug, despite its infinite variations in shape and appearance, humans have a limited number of 'effective' modes and poses for its manipulation. This can be attributed to the fact that humans have mastered the shape prior of the 'mug' category, and can quickly establish the corresponding relations between different mug instances and the prior, such as where the rim and handle are located. In light of this, we propose a new method, CHORD, for Category-level Hand-held Object Reconstruction via shape Deformation. CHORD deforms a categorical shape prior for reconstructing the intra-class objects. To ensure accurate reconstruction, we empower CHORD with three types of awareness: appearance, shape, and interacting pose. In addition, we have constructed a new dataset, COMIC, of category-level hand-object interaction. COMIC contains a rich array of object instances, materials, hand interactions, and viewing directions. Extensive evaluation shows that CHORD outperforms state-of-the-art approaches in both quantitative and qualitative measures. Code, model, and datasets are available at https://kailinli.github.io/CHORD.
Color-NeuS: Reconstructing Neural Implicit Surfaces with Color
Aug 14, 2023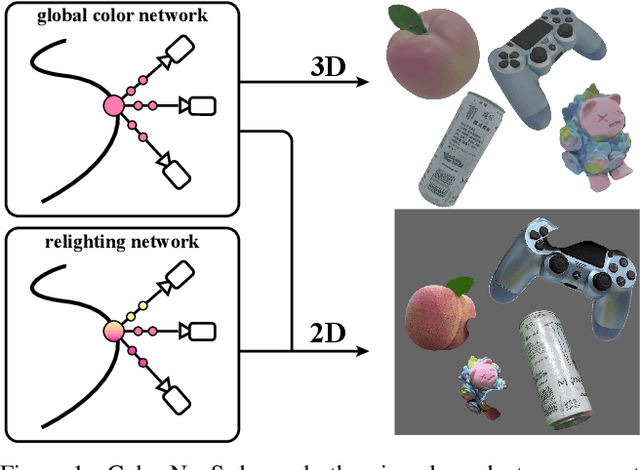
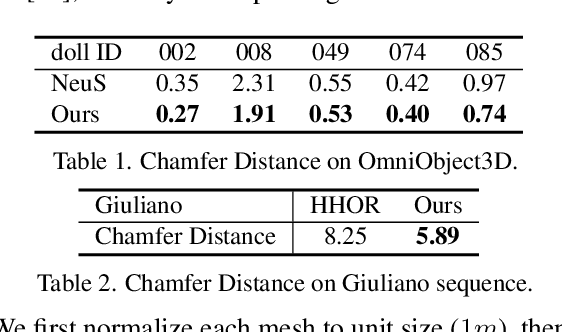
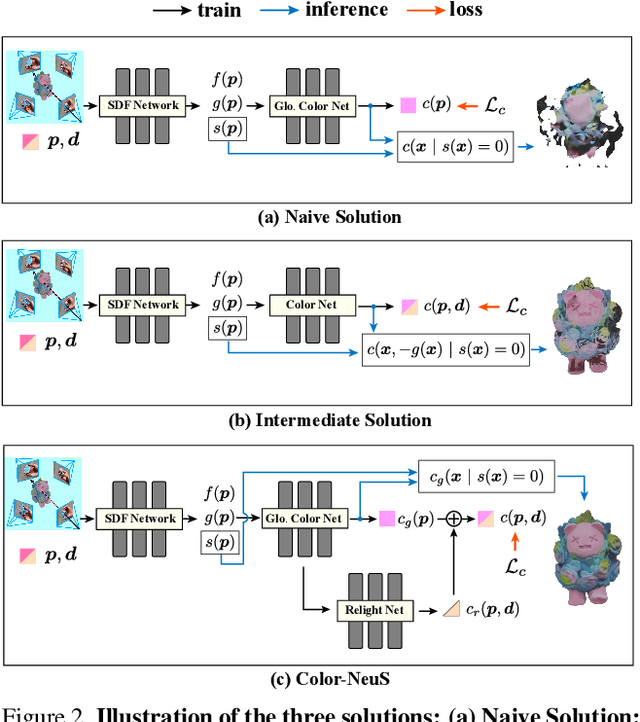
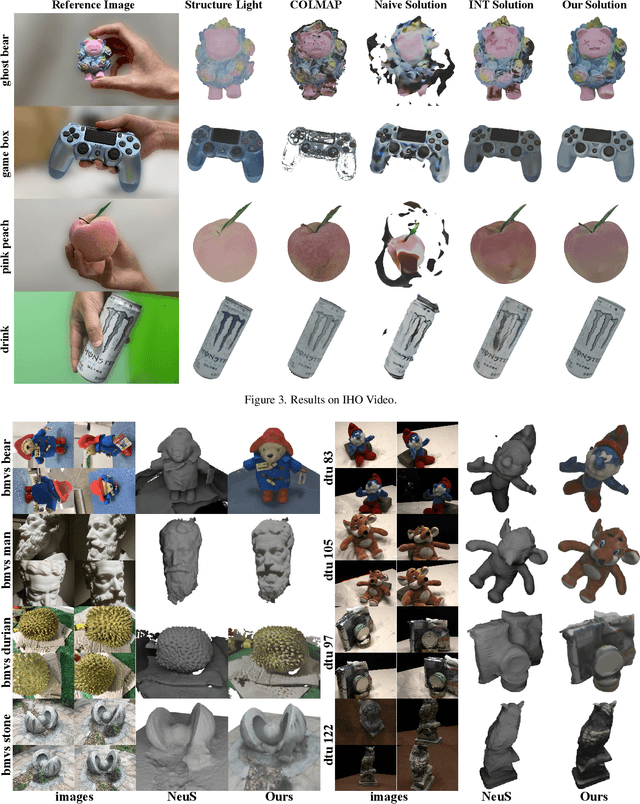
The reconstruction of object surfaces from multi-view images or monocular video is a fundamental issue in computer vision. However, much of the recent research concentrates on reconstructing geometry through implicit or explicit methods. In this paper, we shift our focus towards reconstructing mesh in conjunction with color. We remove the view-dependent color from neural volume rendering while retaining volume rendering performance through a relighting network. Mesh is extracted from the signed distance function (SDF) network for the surface, and color for each surface vertex is drawn from the global color network. To evaluate our approach, we conceived a in hand object scanning task featuring numerous occlusions and dramatic shifts in lighting conditions. We've gathered several videos for this task, and the results surpass those of any existing methods capable of reconstructing mesh alongside color. Additionally, our method's performance was assessed using public datasets, including DTU, BlendedMVS, and OmniObject3D. The results indicated that our method performs well across all these datasets. Project page: https://colmar-zlicheng.github.io/color_neus.
DART: Articulated Hand Model with Diverse Accessories and Rich Textures
Oct 14, 2022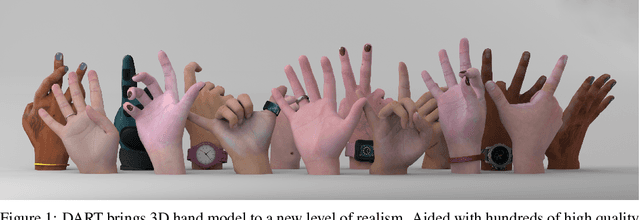
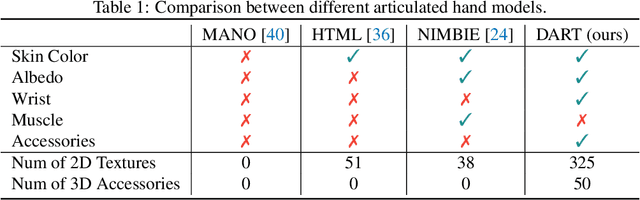

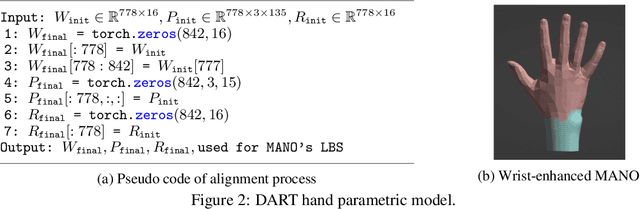
Hand, the bearer of human productivity and intelligence, is receiving much attention due to the recent fever of digital twins. Among different hand morphable models, MANO has been widely used in vision and graphics community. However, MANO disregards textures and accessories, which largely limits its power to synthesize photorealistic hand data. In this paper, we extend MANO with Diverse Accessories and Rich Textures, namely DART. DART is composed of 50 daily 3D accessories which varies in appearance and shape, and 325 hand-crafted 2D texture maps covers different kinds of blemishes or make-ups. Unity GUI is also provided to generate synthetic hand data with user-defined settings, e.g., pose, camera, background, lighting, textures, and accessories. Finally, we release DARTset, which contains large-scale (800K), high-fidelity synthetic hand images, paired with perfect-aligned 3D labels. Experiments demonstrate its superiority in diversity. As a complement to existing hand datasets, DARTset boosts the generalization in both hand pose estimation and mesh recovery tasks. Raw ingredients (textures, accessories), Unity GUI, source code and DARTset are publicly available at dart2022.github.io