 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEMemBench: Interactive Benchmarking of Episodic Memory for VLM Agents
Jan 23, 2026We introduce EMemBench, a programmatic benchmark for evaluating long-term memory of agents through interactive games. Rather than using a fixed set of questions, EMemBench generates questions from each agent's own trajectory, covering both text and visual game environments. Each template computes verifiable ground truth from underlying game signals, with controlled answerability and balanced coverage over memory skills: single/multi-hop recall, induction, temporal, spatial, logical, and adversarial. We evaluate memory agents with strong LMs/VLMs as backbones, using in-context prompting as baselines. Across 15 text games and multiple visual seeds, results are far from saturated: induction and spatial reasoning are persistent bottlenecks, especially in visual setting. Persistent memory yields clear gains for open backbones on text games, but improvements are less consistent for VLM agents, suggesting that visually grounded episodic memory remains an open challenge. A human study further confirms the difficulty of EMemBench.
What Do LLM Agents Know About Their World? Task2Quiz: A Paradigm for Studying Environment Understanding
Jan 14, 2026Large language model (LLM) agents have demonstrated remarkable capabilities in complex decision-making and tool-use tasks, yet their ability to generalize across varying environments remains a under-examined concern. Current evaluation paradigms predominantly rely on trajectory-based metrics that measure task success, while failing to assess whether agents possess a grounded, transferable model of the environment. To address this gap, we propose Task-to-Quiz (T2Q), a deterministic and automated evaluation paradigm designed to decouple task execution from world-state understanding. We instantiate this paradigm in T2QBench, a suite comprising 30 environments and 1,967 grounded QA pairs across multiple difficulty levels. Our extensive experiments reveal that task success is often a poor proxy for environment understanding, and that current memory machanism can not effectively help agents acquire a grounded model of the environment. These findings identify proactive exploration and fine-grained state representation as primary bottlenecks, offering a robust foundation for developing more generalizable autonomous agents.
VoxelSplat: Dynamic Gaussian Splatting as an Effective Loss for Occupancy and Flow Prediction
Jun 05, 2025Recent advancements in camera-based occupancy prediction have focused on the simultaneous prediction of 3D semantics and scene flow, a task that presents significant challenges due to specific difficulties, e.g., occlusions and unbalanced dynamic environments. In this paper, we analyze these challenges and their underlying causes. To address them, we propose a novel regularization framework called VoxelSplat. This framework leverages recent developments in 3D Gaussian Splatting to enhance model performance in two key ways: (i) Enhanced Semantics Supervision through 2D Projection: During training, our method decodes sparse semantic 3D Gaussians from 3D representations and projects them onto the 2D camera view. This provides additional supervision signals in the camera-visible space, allowing 2D labels to improve the learning of 3D semantics. (ii) Scene Flow Learning: Our framework uses the predicted scene flow to model the motion of Gaussians, and is thus able to learn the scene flow of moving objects in a self-supervised manner using the labels of adjacent frames. Our method can be seamlessly integrated into various existing occupancy models, enhancing performance without increasing inference time. Extensive experiments on benchmark datasets demonstrate the effectiveness of VoxelSplat in improving the accuracy of both semantic occupancy and scene flow estimation. The project page and codes are available at https://zzy816.github.io/VoxelSplat-Demo/.
CoGen: 3D Consistent Video Generation via Adaptive Conditioning for Autonomous Driving
Mar 28, 2025Recent progress in driving video generation has shown significant potential for enhancing self-driving systems by providing scalable and controllable training data. Although pretrained state-of-the-art generation models, guided by 2D layout conditions (e.g., HD maps and bounding boxes), can produce photorealistic driving videos, achieving controllable multi-view videos with high 3D consistency remains a major challenge. To tackle this, we introduce a novel spatial adaptive generation framework, CoGen, which leverages advances in 3D generation to improve performance in two key aspects: (i) To ensure 3D consistency, we first generate high-quality, controllable 3D conditions that capture the geometry of driving scenes. By replacing coarse 2D conditions with these fine-grained 3D representations, our approach significantly enhances the spatial consistency of the generated videos. (ii) Additionally, we introduce a consistency adapter module to strengthen the robustness of the model to multi-condition control. The results demonstrate that this method excels in preserving geometric fidelity and visual realism, offering a reliable video generation solution for autonomous driving.
Hydra-MDP: End-to-end Multimodal Planning with Multi-target Hydra-Distillation
Jun 11, 2024
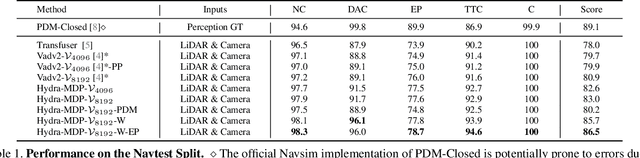
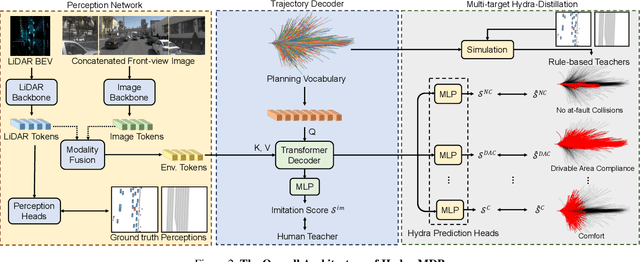
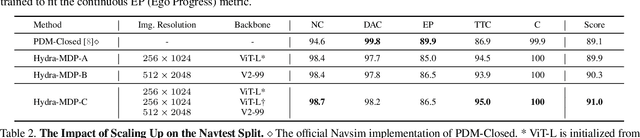
We propose Hydra-MDP, a novel paradigm employing multiple teachers in a teacher-student model. This approach uses knowledge distillation from both human and rule-based teachers to train the student model, which features a multi-head decoder to learn diverse trajectory candidates tailored to various evaluation metrics. With the knowledge of rule-based teachers, Hydra-MDP learns how the environment influences the planning in an end-to-end manner instead of resorting to non-differentiable post-processing. This method achieves the $1^{st}$ place in the Navsim challenge, demonstrating significant improvements in generalization across diverse driving environments and conditions. Code will be available at \url{https://github.com/woxihuanjiangguo/Hydra-MDP}
Curricular Object Manipulation in LiDAR-based Object Detection
Apr 09, 2023



This paper explores the potential of curriculum learning in LiDAR-based 3D object detection by proposing a curricular object manipulation (COM) framework. The framework embeds the curricular training strategy into both the loss design and the augmentation process. For the loss design, we propose the COMLoss to dynamically predict object-level difficulties and emphasize objects of different difficulties based on training stages. On top of the widely-used augmentation technique called GT-Aug in LiDAR detection tasks, we propose a novel COMAug strategy which first clusters objects in ground-truth database based on well-designed heuristics. Group-level difficulties rather than individual ones are then predicted and updated during training for stable results. Model performance and generalization capabilities can be improved by sampling and augmenting progressively more difficult objects into the training samples. Extensive experiments and ablation studies reveal the superior and generality of the proposed framework. The code is available at https://github.com/ZZY816/COM.
Co-Salient Object Detection with Co-Representation Purification
Mar 14, 2023Co-salient object detection (Co-SOD) aims at discovering the common objects in a group of relevant images. Mining a co-representation is essential for locating co-salient objects. Unfortunately, the current Co-SOD method does not pay enough attention that the information not related to the co-salient object is included in the co-representation. Such irrelevant information in the co-representation interferes with its locating of co-salient objects. In this paper, we propose a Co-Representation Purification (CoRP) method aiming at searching noise-free co-representation. We search a few pixel-wise embeddings probably belonging to co-salient regions. These embeddings constitute our co-representation and guide our prediction. For obtaining purer co-representation, we use the prediction to iteratively reduce irrelevant embeddings in our co-representation. Experiments on three datasets demonstrate that our CoRP achieves state-of-the-art performances on the benchmark datasets. Our source code is available at https://github.com/ZZY816/CoRP.
Image Harmonization by Matching Regional References
Apr 10, 2022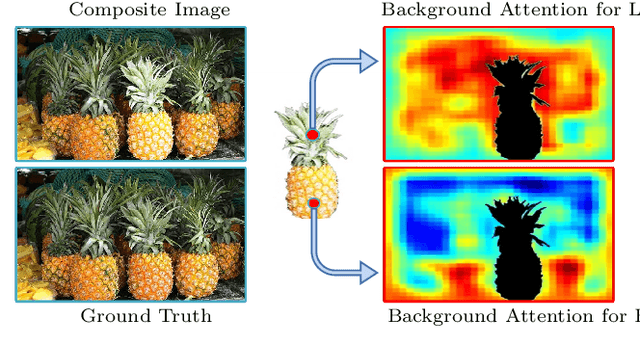
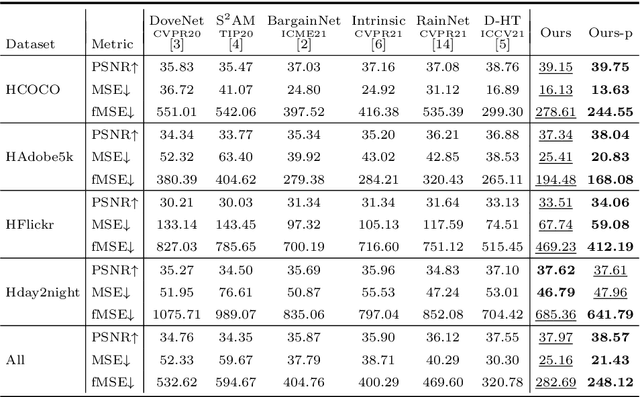
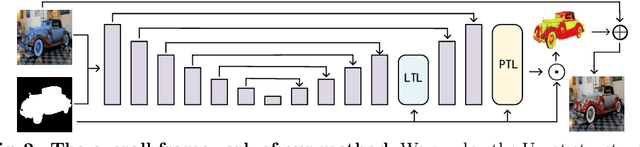
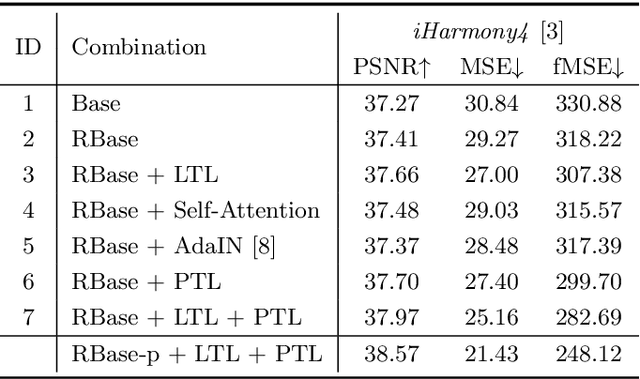
To achieve visual consistency in composite images, recent image harmonization methods typically summarize the appearance pattern of global background and apply it to the global foreground without location discrepancy. However, for a real image, the appearances (illumination, color temperature, saturation, hue, texture, etc) of different regions can vary significantly. So previous methods, which transfer the appearance globally, are not optimal. Trying to solve this issue, we firstly match the contents between the foreground and background and then adaptively adjust every foreground location according to the appearance of its content-related background regions. Further, we design a residual reconstruction strategy, that uses the predicted residual to adjust the appearance, and the composite foreground to reserve the image details. Extensive experiments demonstrate the effectiveness of our method. The source code will be available publicly.