 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Physically Consistent Driving Video World Models under Challenging Trajectories
Mar 25, 2026Video generation models have shown strong potential as world models for autonomous driving simulation. However, existing approaches are primarily trained on real-world driving datasets, which mostly contain natural and safe driving scenarios. As a result, current models often fail when conditioned on challenging or counterfactual trajectories-such as imperfect trajectories generated by simulators or planning systems-producing videos with severe physical inconsistencies and artifacts. To address this limitation, we propose PhyGenesis, a world model designed to generate driving videos with high visual fidelity and strong physical consistency. Our framework consists of two key components: (1) a physical condition generator that transforms potentially invalid trajectory inputs into physically plausible conditions, and (2) a physics-enhanced video generator that produces high-fidelity multi-view driving videos under these conditions. To effectively train these components, we construct a large-scale, physics-rich heterogeneous dataset. Specifically, in addition to real-world driving videos, we generate diverse challenging driving scenarios using the CARLA simulator, from which we derive supervision signals that guide the model to learn physically grounded dynamics under extreme conditions. This challenging-trajectory learning strategy enables trajectory correction and promotes physically consistent video generation. Extensive experiments demonstrate that PhyGenesis consistently outperforms state-of-the-art methods, especially on challenging trajectories. Our project page is available at: https://wm-research.github.io/PhyGenesis/.
Rethinking Driving World Model as Synthetic Data Generator for Perception Tasks
Oct 22, 2025Recent advancements in driving world models enable controllable generation of high-quality RGB videos or multimodal videos. Existing methods primarily focus on metrics related to generation quality and controllability. However, they often overlook the evaluation of downstream perception tasks, which are $\mathbf{really\ crucial}$ for the performance of autonomous driving. Existing methods usually leverage a training strategy that first pretrains on synthetic data and finetunes on real data, resulting in twice the epochs compared to the baseline (real data only). When we double the epochs in the baseline, the benefit of synthetic data becomes negligible. To thoroughly demonstrate the benefit of synthetic data, we introduce Dream4Drive, a novel synthetic data generation framework designed for enhancing the downstream perception tasks. Dream4Drive first decomposes the input video into several 3D-aware guidance maps and subsequently renders the 3D assets onto these guidance maps. Finally, the driving world model is fine-tuned to produce the edited, multi-view photorealistic videos, which can be used to train the downstream perception models. Dream4Drive enables unprecedented flexibility in generating multi-view corner cases at scale, significantly boosting corner case perception in autonomous driving. To facilitate future research, we also contribute a large-scale 3D asset dataset named DriveObj3D, covering the typical categories in driving scenarios and enabling diverse 3D-aware video editing. We conduct comprehensive experiments to show that Dream4Drive can effectively boost the performance of downstream perception models under various training epochs. Project: $\href{https://wm-research.github.io/Dream4Drive/}{this\ https\ URL}$
Reusing Attention for One-stage Lane Topology Understanding
Jul 23, 2025Understanding lane toplogy relationships accurately is critical for safe autonomous driving. However, existing two-stage methods suffer from inefficiencies due to error propagations and increased computational overheads. To address these challenges, we propose a one-stage architecture that simultaneously predicts traffic elements, lane centerlines and topology relationship, improving both the accuracy and inference speed of lane topology understanding for autonomous driving. Our key innovation lies in reusing intermediate attention resources within distinct transformer decoders. This approach effectively leverages the inherent relational knowledge within the element detection module to enable the modeling of topology relationships among traffic elements and lanes without requiring additional computationally expensive graph networks. Furthermore, we are the first to demonstrate that knowledge can be distilled from models that utilize standard definition (SD) maps to those operates without using SD maps, enabling superior performance even in the absence of SD maps. Extensive experiments on the OpenLane-V2 dataset show that our approach outperforms baseline methods in both accuracy and efficiency, achieving superior results in lane detection, traffic element identification, and topology reasoning. Our code is available at https://github.com/Yang-Li-2000/one-stage.git.
PosePilot: Steering Camera Pose for Generative World Models with Self-supervised Depth
May 03, 2025Recent advancements in autonomous driving (AD) systems have highlighted the potential of world models in achieving robust and generalizable performance across both ordinary and challenging driving conditions. However, a key challenge remains: precise and flexible camera pose control, which is crucial for accurate viewpoint transformation and realistic simulation of scene dynamics. In this paper, we introduce PosePilot, a lightweight yet powerful framework that significantly enhances camera pose controllability in generative world models. Drawing inspiration from self-supervised depth estimation, PosePilot leverages structure-from-motion principles to establish a tight coupling between camera pose and video generation. Specifically, we incorporate self-supervised depth and pose readouts, allowing the model to infer depth and relative camera motion directly from video sequences. These outputs drive pose-aware frame warping, guided by a photometric warping loss that enforces geometric consistency across synthesized frames. To further refine camera pose estimation, we introduce a reverse warping step and a pose regression loss, improving viewpoint precision and adaptability. Extensive experiments on autonomous driving and general-domain video datasets demonstrate that PosePilot significantly enhances structural understanding and motion reasoning in both diffusion-based and auto-regressive world models. By steering camera pose with self-supervised depth, PosePilot sets a new benchmark for pose controllability, enabling physically consistent, reliable viewpoint synthesis in generative world models.
CoGen: 3D Consistent Video Generation via Adaptive Conditioning for Autonomous Driving
Mar 28, 2025Recent progress in driving video generation has shown significant potential for enhancing self-driving systems by providing scalable and controllable training data. Although pretrained state-of-the-art generation models, guided by 2D layout conditions (e.g., HD maps and bounding boxes), can produce photorealistic driving videos, achieving controllable multi-view videos with high 3D consistency remains a major challenge. To tackle this, we introduce a novel spatial adaptive generation framework, CoGen, which leverages advances in 3D generation to improve performance in two key aspects: (i) To ensure 3D consistency, we first generate high-quality, controllable 3D conditions that capture the geometry of driving scenes. By replacing coarse 2D conditions with these fine-grained 3D representations, our approach significantly enhances the spatial consistency of the generated videos. (ii) Additionally, we introduce a consistency adapter module to strengthen the robustness of the model to multi-condition control. The results demonstrate that this method excels in preserving geometric fidelity and visual realism, offering a reliable video generation solution for autonomous driving.
Camera Relocalization in Shadow-free Neural Radiance Fields
May 23, 2024



Camera relocalization is a crucial problem in computer vision and robotics. Recent advancements in neural radiance fields (NeRFs) have shown promise in synthesizing photo-realistic images. Several works have utilized NeRFs for refining camera poses, but they do not account for lighting changes that can affect scene appearance and shadow regions, causing a degraded pose optimization process. In this paper, we propose a two-staged pipeline that normalizes images with varying lighting and shadow conditions to improve camera relocalization. We implement our scene representation upon a hash-encoded NeRF which significantly boosts up the pose optimization process. To account for the noisy image gradient computing problem in grid-based NeRFs, we further propose a re-devised truncated dynamic low-pass filter (TDLF) and a numerical gradient averaging technique to smoothen the process. Experimental results on several datasets with varying lighting conditions demonstrate that our method achieves state-of-the-art results in camera relocalization under varying lighting conditions. Code and data will be made publicly available.
Spectrally Pruned Gaussian Fields with Neural Compensation
May 01, 2024Recently, 3D Gaussian Splatting, as a novel 3D representation, has garnered attention for its fast rendering speed and high rendering quality. However, this comes with high memory consumption, e.g., a well-trained Gaussian field may utilize three million Gaussian primitives and over 700 MB of memory. We credit this high memory footprint to the lack of consideration for the relationship between primitives. In this paper, we propose a memory-efficient Gaussian field named SUNDAE with spectral pruning and neural compensation. On one hand, we construct a graph on the set of Gaussian primitives to model their relationship and design a spectral down-sampling module to prune out primitives while preserving desired signals. On the other hand, to compensate for the quality loss of pruning Gaussians, we exploit a lightweight neural network head to mix splatted features, which effectively compensates for quality losses while capturing the relationship between primitives in its weights. We demonstrate the performance of SUNDAE with extensive results. For example, SUNDAE can achieve 26.80 PSNR at 145 FPS using 104 MB memory while the vanilla Gaussian splatting algorithm achieves 25.60 PSNR at 160 FPS using 523 MB memory, on the Mip-NeRF360 dataset. Codes are publicly available at https://runyiyang.github.io/projects/SUNDAE/.
P-MapNet: Far-seeing Map Generator Enhanced by both SDMap and HDMap Priors
Mar 29, 2024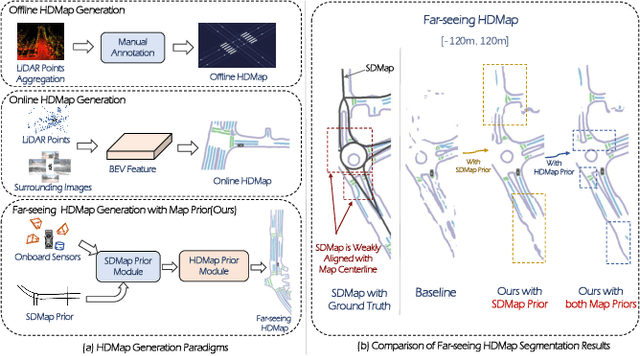
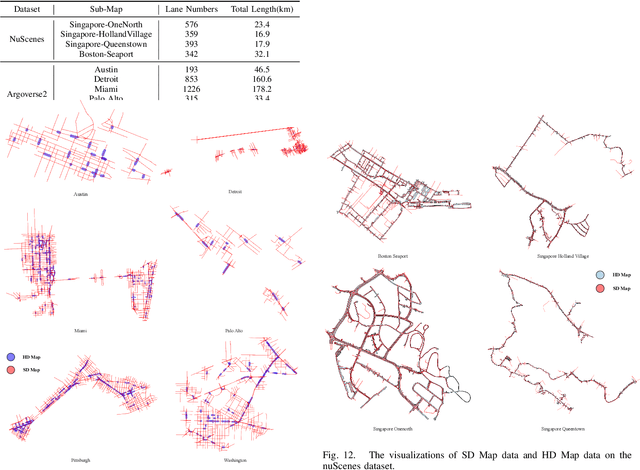
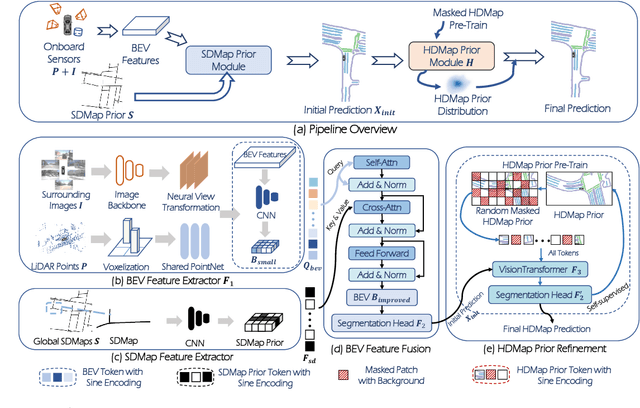
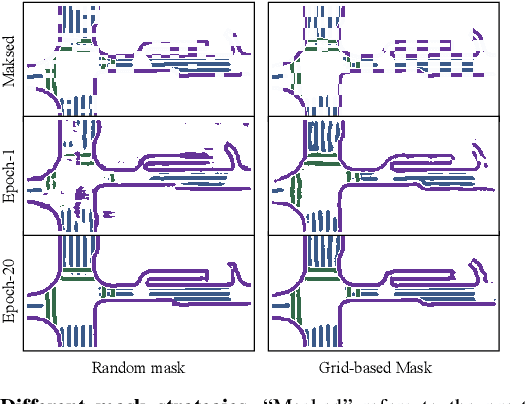
Autonomous vehicles are gradually entering city roads today, with the help of high-definition maps (HDMaps). However, the reliance on HDMaps prevents autonomous vehicles from stepping into regions without this expensive digital infrastructure. This fact drives many researchers to study online HDMap generation algorithms, but the performance of these algorithms at far regions is still unsatisfying. We present P-MapNet, in which the letter P highlights the fact that we focus on incorporating map priors to improve model performance. Specifically, we exploit priors in both SDMap and HDMap. On one hand, we extract weakly aligned SDMap from OpenStreetMap, and encode it as an additional conditioning branch. Despite the misalignment challenge, our attention-based architecture adaptively attends to relevant SDMap skeletons and significantly improves performance. On the other hand, we exploit a masked autoencoder to capture the prior distribution of HDMap, which can serve as a refinement module to mitigate occlusions and artifacts. We benchmark on the nuScenes and Argoverse2 datasets. Through comprehensive experiments, we show that: (1) our SDMap prior can improve online map generation performance, using both rasterized (by up to $+18.73$ $\rm mIoU$) and vectorized (by up to $+8.50$ $\rm mAP$) output representations. (2) our HDMap prior can improve map perceptual metrics by up to $6.34\%$. (3) P-MapNet can be switched into different inference modes that covers different regions of the accuracy-efficiency trade-off landscape. (4) P-MapNet is a far-seeing solution that brings larger improvements on longer ranges. Codes and models are publicly available at https://jike5.github.io/P-MapNet.
AsyncNeRF: Learning Large-scale Radiance Fields from Asynchronous RGB-D Sequences with Time-Pose Function
Nov 14, 2022Large-scale radiance fields are promising mapping tools for smart transportation applications like autonomous driving or drone delivery. But for large-scale scenes, compact synchronized RGB-D cameras are not applicable due to limited sensing range, and using separate RGB and depth sensors inevitably leads to unsynchronized sequences. Inspired by the recent success of self-calibrating radiance field training methods that do not require known intrinsic or extrinsic parameters, we propose the first solution that self-calibrates the mismatch between RGB and depth frames. We leverage the important domain-specific fact that RGB and depth frames are actually sampled from the same trajectory and develop a novel implicit network called the time-pose function. Combining it with a large-scale radiance field leads to an architecture that cascades two implicit representation networks. To validate its effectiveness, we construct a diverse and photorealistic dataset that covers various RGB-D mismatch scenarios. Through a comprehensive benchmarking on this dataset, we demonstrate the flexibility of our method in different scenarios and superior performance over applicable prior counterparts. Codes, data, and models will be made publicly available.
LATITUDE: Robotic Global Localization with Truncated Dynamic Low-pass Filter in City-scale NeRF
Sep 18, 2022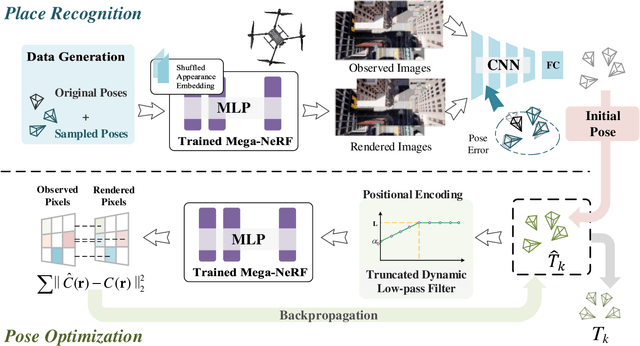
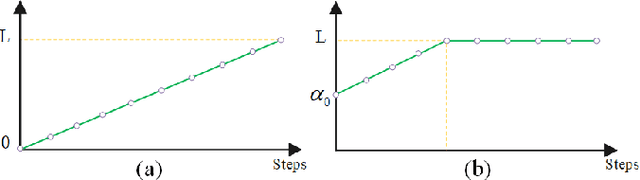
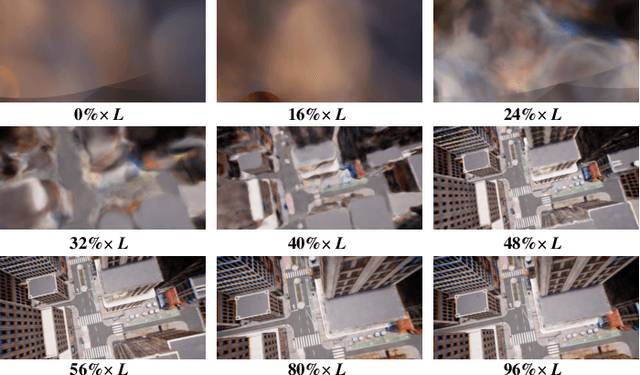
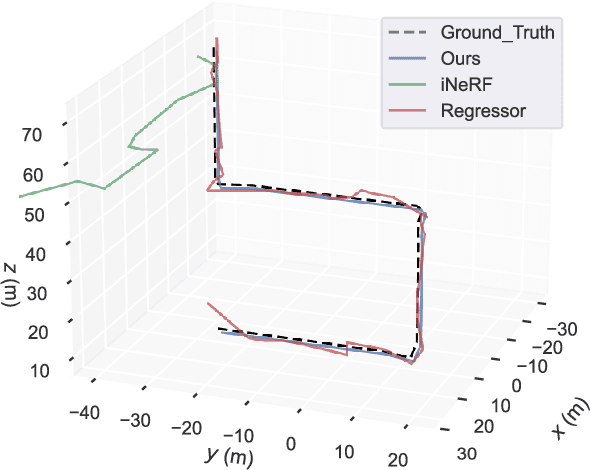
Neural Radiance Fields (NeRFs) have made great success in representing complex 3D scenes with high-resolution details and efficient memory. Nevertheless, current NeRF-based pose estimators have no initial pose prediction and are prone to local optima during optimization. In this paper, we present LATITUDE: Global Localization with Truncated Dynamic Low-pass Filter, which introduces a two-stage localization mechanism in city-scale NeRF. In place recognition stage, we train a regressor through images generated from trained NeRFs, which provides an initial value for global localization. In pose optimization stage, we minimize the residual between the observed image and rendered image by directly optimizing the pose on tangent plane. To avoid convergence to local optimum, we introduce a Truncated Dynamic Low-pass Filter (TDLF) for coarse-to-fine pose registration. We evaluate our method on both synthetic and real-world data and show its potential applications for high-precision navigation in large-scale city scenes. Codes and data will be publicly available at https://github.com/jike5/LATITUDE.