 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Fidelity Compression of Seismic Velocity Models via SIREN Auto-Decoders
Mar 17, 2026Implicit Neural Representations (INRs) have emerged as a powerful paradigm for representing continuous signals independently of grid resolution. In this paper, we propose a high-fidelity neural compression framework based on a SIREN (Sinusoidal Representation Networks) auto-decoder to represent multi-structural seismic velocity models from the OpenFWI benchmark. Our method compresses each 70x70 velocity map (4,900 points) into a compact 256-dimensional latent vector, achieving a compression ratio of 19:1. We evaluate the framework on 1,000 samples across five diverse geological families: FlatVel, CurveVel, FlatFault, CurveFault, and Style. Experimental results demonstrate an average PSNR of 32.47 dB and SSIM of 0.956, indicating high-quality reconstruction. Furthermore, we showcase two key advantages of our implicit representation: (1) smooth latent space interpolation that generates plausible intermediate velocity structures, and (2) zero-shot super-resolution capability that reconstructs velocity fields at arbitrary resolutions up to 280x280 without additional training. The results highlight the potential of INR-based auto-decoders for efficient storage, multi-scale analysis, and downstream geophysical applications such as full waveform inversion.
Seismic full-waveform inversion based on a physics-driven generative adversarial network
Mar 16, 2026Objectives: Full-waveform inversion (FWI) is a high-resolution geophysical imaging technique that reconstructs subsurface velocity models by iteratively minimizing the misfit between predicted and observed seismic data. However, under complex geological conditions, conventional FWI suffers from strong dependence on the initial model and tends to produce unstable results when the data are sparse or contaminated by noise. Methods: To address these limitations, this paper proposes a physics-driven generative adversarial network-based full-waveform inversion method. The proposed approach integrates the data-driven capability of deep neural networks with the physical constraints imposed by the seismic wave equation, and employs adversarial training through a discriminator to enhance the stability and robustness of the inversion results. Results: Experimental results on two representative benchmark geological models demonstrate that the proposed method can effectively recover complex velocity structures and achieves superior performance in terms of structural similarity (SSIM) and signal-to-noise ratio (SNR). Conclusions: This method provides a promising solution for alleviating the initial-model dependence in full-waveform inversion and shows strong potential for practical applications.
Robust and High-Fidelity 3D Gaussian Splatting: Fusing Pose Priors and Geometry Constraints for Texture-Deficient Outdoor Scenes
Nov 10, 20253D Gaussian Splatting (3DGS) has emerged as a key rendering pipeline for digital asset creation due to its balance between efficiency and visual quality. To address the issues of unstable pose estimation and scene representation distortion caused by geometric texture inconsistency in large outdoor scenes with weak or repetitive textures, we approach the problem from two aspects: pose estimation and scene representation. For pose estimation, we leverage LiDAR-IMU Odometry to provide prior poses for cameras in large-scale environments. These prior pose constraints are incorporated into COLMAP's triangulation process, with pose optimization performed via bundle adjustment. Ensuring consistency between pixel data association and prior poses helps maintain both robustness and accuracy. For scene representation, we introduce normal vector constraints and effective rank regularization to enforce consistency in the direction and shape of Gaussian primitives. These constraints are jointly optimized with the existing photometric loss to enhance the map quality. We evaluate our approach using both public and self-collected datasets. In terms of pose optimization, our method requires only one-third of the time while maintaining accuracy and robustness across both datasets. In terms of scene representation, the results show that our method significantly outperforms conventional 3DGS pipelines. Notably, on self-collected datasets characterized by weak or repetitive textures, our approach demonstrates enhanced visualization capabilities and achieves superior overall performance. Codes and data will be publicly available at https://github.com/justinyeah/normal_shape.git.
Camera Relocalization in Shadow-free Neural Radiance Fields
May 23, 2024



Camera relocalization is a crucial problem in computer vision and robotics. Recent advancements in neural radiance fields (NeRFs) have shown promise in synthesizing photo-realistic images. Several works have utilized NeRFs for refining camera poses, but they do not account for lighting changes that can affect scene appearance and shadow regions, causing a degraded pose optimization process. In this paper, we propose a two-staged pipeline that normalizes images with varying lighting and shadow conditions to improve camera relocalization. We implement our scene representation upon a hash-encoded NeRF which significantly boosts up the pose optimization process. To account for the noisy image gradient computing problem in grid-based NeRFs, we further propose a re-devised truncated dynamic low-pass filter (TDLF) and a numerical gradient averaging technique to smoothen the process. Experimental results on several datasets with varying lighting conditions demonstrate that our method achieves state-of-the-art results in camera relocalization under varying lighting conditions. Code and data will be made publicly available.
Blending Distributed NeRFs with Tri-stage Robust Pose Optimization
May 05, 2024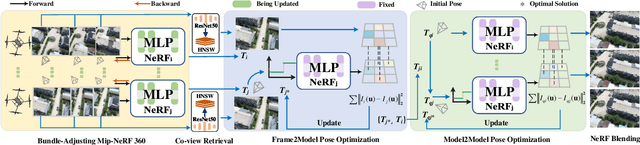
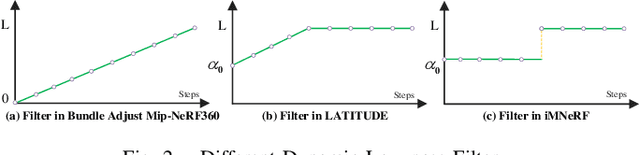

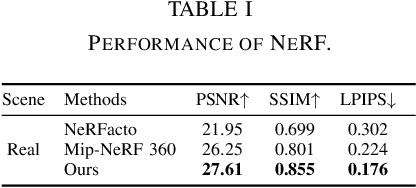
Due to the limited model capacity, leveraging distributed Neural Radiance Fields (NeRFs) for modeling extensive urban environments has become a necessity. However, current distributed NeRF registration approaches encounter aliasing artifacts, arising from discrepancies in rendering resolutions and suboptimal pose precision. These factors collectively deteriorate the fidelity of pose estimation within NeRF frameworks, resulting in occlusion artifacts during the NeRF blending stage. In this paper, we present a distributed NeRF system with tri-stage pose optimization. In the first stage, precise poses of images are achieved by bundle adjusting Mip-NeRF 360 with a coarse-to-fine strategy. In the second stage, we incorporate the inverting Mip-NeRF 360, coupled with the truncated dynamic low-pass filter, to enable the achievement of robust and precise poses, termed Frame2Model optimization. On top of this, we obtain a coarse transformation between NeRFs in different coordinate systems. In the third stage, we fine-tune the transformation between NeRFs by Model2Model pose optimization. After obtaining precise transformation parameters, we proceed to implement NeRF blending, showcasing superior performance metrics in both real-world and simulation scenarios. Codes and data will be publicly available at https://github.com/boilcy/Distributed-NeRF.