 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeT2VUnlearning: A Concept Erasing Method for Text-to-Video Diffusion Models
May 23, 2025Recent advances in text-to-video (T2V) diffusion models have significantly enhanced the quality of generated videos. However, their ability to produce explicit or harmful content raises concerns about misuse and potential rights violations. Inspired by the success of unlearning techniques in erasing undesirable concepts from text-to-image (T2I) models, we extend unlearning to T2V models and propose a robust and precise unlearning method. Specifically, we adopt negatively-guided velocity prediction fine-tuning and enhance it with prompt augmentation to ensure robustness against LLM-refined prompts. To achieve precise unlearning, we incorporate a localization and a preservation regularization to preserve the model's ability to generate non-target concepts. Extensive experiments demonstrate that our method effectively erases a specific concept while preserving the model's generation capability for all other concepts, outperforming existing methods. We provide the unlearned models in \href{https://github.com/VDIGPKU/T2VUnlearning.git}{https://github.com/VDIGPKU/T2VUnlearning.git}.
SA-GS: Semantic-Aware Gaussian Splatting for Large Scene Reconstruction with Geometry Constrain
May 28, 2024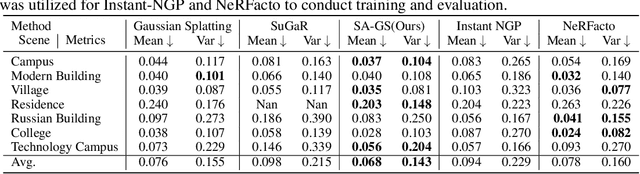
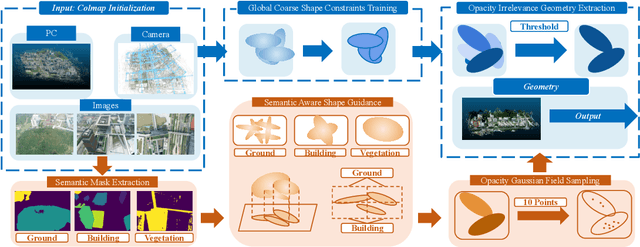
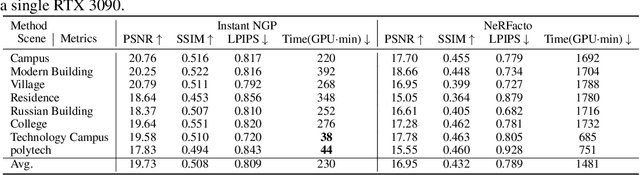
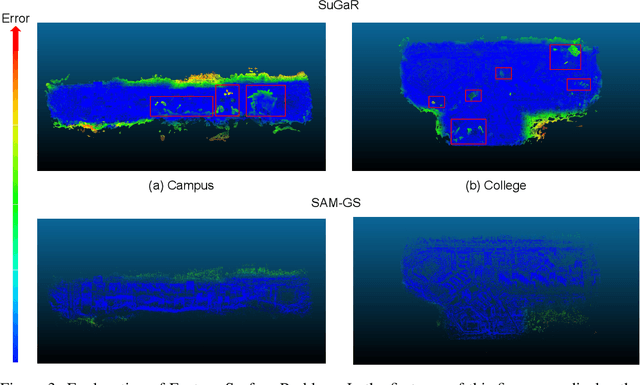
With the emergence of Gaussian Splats, recent efforts have focused on large-scale scene geometric reconstruction. However, most of these efforts either concentrate on memory reduction or spatial space division, neglecting information in the semantic space. In this paper, we propose a novel method, named SA-GS, for fine-grained 3D geometry reconstruction using semantic-aware 3D Gaussian Splats. Specifically, we leverage prior information stored in large vision models such as SAM and DINO to generate semantic masks. We then introduce a geometric complexity measurement function to serve as soft regularization, guiding the shape of each Gaussian Splat within specific semantic areas. Additionally, we present a method that estimates the expected number of Gaussian Splats in different semantic areas, effectively providing a lower bound for Gaussian Splats in these areas. Subsequently, we extract the point cloud using a novel probability density-based extraction method, transforming Gaussian Splats into a point cloud crucial for downstream tasks. Our method also offers the potential for detailed semantic inquiries while maintaining high image-based reconstruction results. We provide extensive experiments on publicly available large-scale scene reconstruction datasets with highly accurate point clouds as ground truth and our novel dataset. Our results demonstrate the superiority of our method over current state-of-the-art Gaussian Splats reconstruction methods by a significant margin in terms of geometric-based measurement metrics. Code and additional results will soon be available on our project page.
Blending Distributed NeRFs with Tri-stage Robust Pose Optimization
May 05, 2024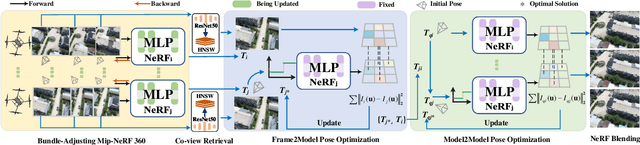
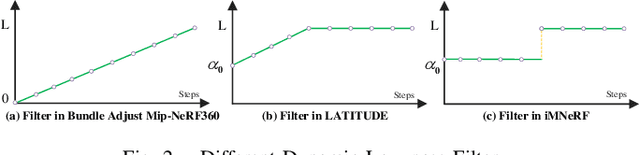

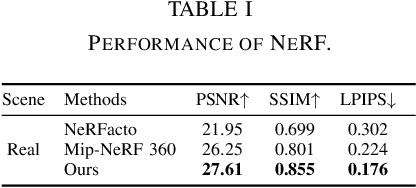
Due to the limited model capacity, leveraging distributed Neural Radiance Fields (NeRFs) for modeling extensive urban environments has become a necessity. However, current distributed NeRF registration approaches encounter aliasing artifacts, arising from discrepancies in rendering resolutions and suboptimal pose precision. These factors collectively deteriorate the fidelity of pose estimation within NeRF frameworks, resulting in occlusion artifacts during the NeRF blending stage. In this paper, we present a distributed NeRF system with tri-stage pose optimization. In the first stage, precise poses of images are achieved by bundle adjusting Mip-NeRF 360 with a coarse-to-fine strategy. In the second stage, we incorporate the inverting Mip-NeRF 360, coupled with the truncated dynamic low-pass filter, to enable the achievement of robust and precise poses, termed Frame2Model optimization. On top of this, we obtain a coarse transformation between NeRFs in different coordinate systems. In the third stage, we fine-tune the transformation between NeRFs by Model2Model pose optimization. After obtaining precise transformation parameters, we proceed to implement NeRF blending, showcasing superior performance metrics in both real-world and simulation scenarios. Codes and data will be publicly available at https://github.com/boilcy/Distributed-NeRF.
Semi-Aerodynamic Model Aided Invariant Kalman Filtering for UAV Full-State Estimation
Oct 03, 2023Due to the state trajectory-independent features of invariant Kalman filtering (InEKF), it has attracted widespread attention in the research community for its significantly improved state estimation accuracy and convergence under disturbance. In this paper, we formulate the full-source data fusion navigation problem for fixed-wing unmanned aerial vehicle (UAV) within a framework based on error state right-invariant extended Kalman filtering (ES-RIEKF) on Lie groups. We merge measurements from a multi-rate onboard sensor network on UAVs to achieve real-time estimation of pose, air flow angles, and wind speed. Detailed derivations are provided, and the algorithm's convergence and accuracy improvements over established methods like Error State EKF (ES-EKF) and Nonlinear Complementary Filter (NCF) are demonstrated using real-flight data from UAVs. Additionally, we introduce a semi-aerodynamic model fusion framework that relies solely on ground-measurable parameters. We design and train an Long Short Term Memory (LSTM) deep network to achieve drift-free prediction of the UAV's angle of attack (AOA) and side-slip angle (SA) using easily obtainable onboard data like control surface deflections, thereby significantly reducing dependency on GNSS or complicated aerodynamic model parameters. Further, we validate the algorithm's robust advantages under GNSS denied, where flight data shows that the maximum positioning error stays within 30 meters over a 130-second denial period. To the best of our knowledge, this study is the first to apply ES-RIEKF to full-source navigation applications for fixed-wing UAVs, aiming to provide engineering references for designers. Our implementations using MATLAB/Simulink will open source.
DUAW: Data-free Universal Adversarial Watermark against Stable Diffusion Customization
Aug 19, 2023



Stable Diffusion (SD) customization approaches enable users to personalize SD model outputs, greatly enhancing the flexibility and diversity of AI art. However, they also allow individuals to plagiarize specific styles or subjects from copyrighted images, which raises significant concerns about potential copyright infringement. To address this issue, we propose an invisible data-free universal adversarial watermark (DUAW), aiming to protect a myriad of copyrighted images from different customization approaches across various versions of SD models. First, DUAW is designed to disrupt the variational autoencoder during SD customization. Second, DUAW operates in a data-free context, where it is trained on synthetic images produced by a Large Language Model (LLM) and a pretrained SD model. This approach circumvents the necessity of directly handling copyrighted images, thereby preserving their confidentiality. Once crafted, DUAW can be imperceptibly integrated into massive copyrighted images, serving as a protective measure by inducing significant distortions in the images generated by customized SD models. Experimental results demonstrate that DUAW can effectively distort the outputs of fine-tuned SD models, rendering them discernible to both human observers and a simple classifier.
MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving
Jul 27, 2023Nowadays, autonomous cars can drive smoothly in ordinary cases, and it is widely recognized that realistic sensor simulation will play a critical role in solving remaining corner cases by simulating them. To this end, we propose an autonomous driving simulator based upon neural radiance fields (NeRFs). Compared with existing works, ours has three notable features: (1) Instance-aware. Our simulator models the foreground instances and background environments separately with independent networks so that the static (e.g., size and appearance) and dynamic (e.g., trajectory) properties of instances can be controlled separately. (2) Modular. Our simulator allows flexible switching between different modern NeRF-related backbones, sampling strategies, input modalities, etc. We expect this modular design to boost academic progress and industrial deployment of NeRF-based autonomous driving simulation. (3) Realistic. Our simulator set new state-of-the-art photo-realism results given the best module selection. Our simulator will be open-sourced while most of our counterparts are not. Project page: https://open-air-sun.github.io/mars/.