 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLATITUDE: Robotic Global Localization with Truncated Dynamic Low-pass Filter in City-scale NeRF
Paper and Code
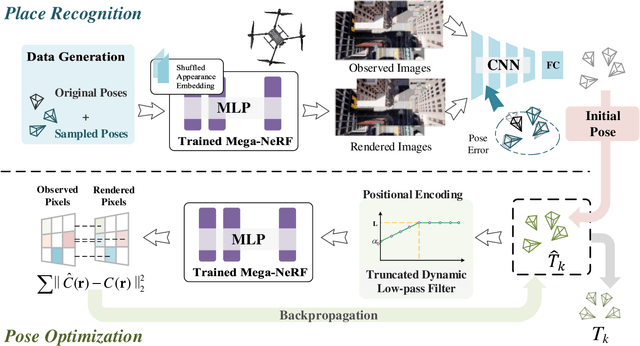
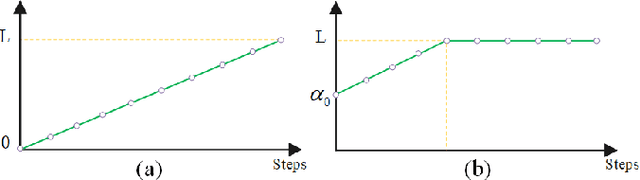
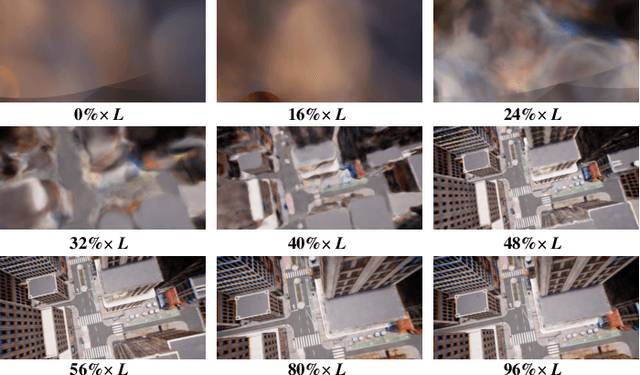
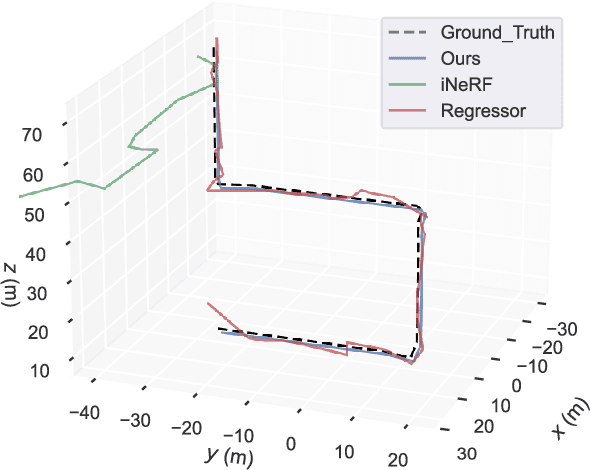
Neural Radiance Fields (NeRFs) have made great success in representing complex 3D scenes with high-resolution details and efficient memory. Nevertheless, current NeRF-based pose estimators have no initial pose prediction and are prone to local optima during optimization. In this paper, we present LATITUDE: Global Localization with Truncated Dynamic Low-pass Filter, which introduces a two-stage localization mechanism in city-scale NeRF. In place recognition stage, we train a regressor through images generated from trained NeRFs, which provides an initial value for global localization. In pose optimization stage, we minimize the residual between the observed image and rendered image by directly optimizing the pose on tangent plane. To avoid convergence to local optimum, we introduce a Truncated Dynamic Low-pass Filter (TDLF) for coarse-to-fine pose registration. We evaluate our method on both synthetic and real-world data and show its potential applications for high-precision navigation in large-scale city scenes. Codes and data will be publicly available at https://github.com/jike5/LATITUDE.