 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoGen: 3D Consistent Video Generation via Adaptive Conditioning for Autonomous Driving
Mar 28, 2025Recent progress in driving video generation has shown significant potential for enhancing self-driving systems by providing scalable and controllable training data. Although pretrained state-of-the-art generation models, guided by 2D layout conditions (e.g., HD maps and bounding boxes), can produce photorealistic driving videos, achieving controllable multi-view videos with high 3D consistency remains a major challenge. To tackle this, we introduce a novel spatial adaptive generation framework, CoGen, which leverages advances in 3D generation to improve performance in two key aspects: (i) To ensure 3D consistency, we first generate high-quality, controllable 3D conditions that capture the geometry of driving scenes. By replacing coarse 2D conditions with these fine-grained 3D representations, our approach significantly enhances the spatial consistency of the generated videos. (ii) Additionally, we introduce a consistency adapter module to strengthen the robustness of the model to multi-condition control. The results demonstrate that this method excels in preserving geometric fidelity and visual realism, offering a reliable video generation solution for autonomous driving.
ImagineMap: Enhanced HD Map Construction with SD Maps
Dec 22, 2024Track Mapless demands models to process multi-view images and Standard-Definition (SD) maps, outputting lane and traffic element perceptions along with their topological relationships. We propose a novel architecture that integrates SD map priors to improve lane line and area detection performance. Inspired by TopoMLP, our model employs a two-stage structure: perception and reasoning. The downstream topology head uses the output from the upstream detection head, meaning accuracy improvements in detection significantly boost downstream performance.
Hydra-MDP: End-to-end Multimodal Planning with Multi-target Hydra-Distillation
Jun 11, 2024
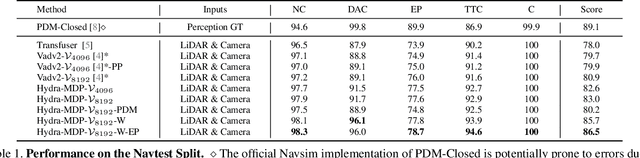
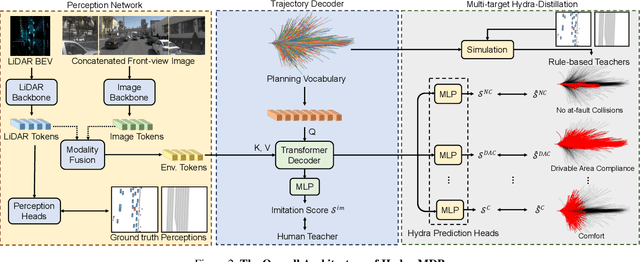
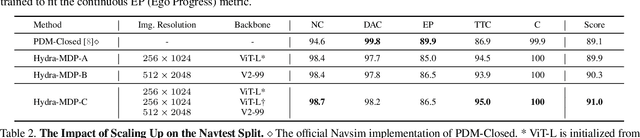
We propose Hydra-MDP, a novel paradigm employing multiple teachers in a teacher-student model. This approach uses knowledge distillation from both human and rule-based teachers to train the student model, which features a multi-head decoder to learn diverse trajectory candidates tailored to various evaluation metrics. With the knowledge of rule-based teachers, Hydra-MDP learns how the environment influences the planning in an end-to-end manner instead of resorting to non-differentiable post-processing. This method achieves the $1^{st}$ place in the Navsim challenge, demonstrating significant improvements in generalization across diverse driving environments and conditions. Code will be available at \url{https://github.com/woxihuanjiangguo/Hydra-MDP}