 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Test-Time Learning Approach to Reparameterize the Geophysical Inverse Problem with a Convolutional Neural Network
Dec 07, 2023



Regularization is critical in solving the ill-posed geo-physical inversion problems. Explicit regularization is often used, but there are opportunities to explore the implicit regularization effect inherently from a Neural Network structure. Researchers in Computer Vision (CV) have discovered that the Convolutional Neural Network (CNN) architecture inherently enforces a regularization that is advantageous for addressing diverse CV inverse problems, including de-noising and in-painting. In this study, we examine the applicability of this implicit regularization to geophysical inversions. The CNN maps an arbitrary vector to the model space (e.g. log-conductivity on the simulation mesh). The predicted subsurface model is then fed into a forward numerical simulation process to generate corresponding predicted measurements. Subsequently, the objective function value is computed by comparing these predicted measurements with the observed field measurements. The backpropagation algorithm is employed to update the trainable parameters of the CNN during the inversion. Note that the CNN in our proposed method does not require training before the inversion, rather, the CNN weights are estimated in the inversion algorithm, hence this is a test-time learning (TTL) approach. The results demonstrate that the implicit regularization provided by the CNN can be useful in DC resistivity inversions. We also provide a detailed discussion of the potential sources of this implicit regularization and some practical guides for applying the proposed method to other geophysical scenarios. The proposed approach for reparameterizing the inverse problem can be adapted to other Tikhonov-style geophysical inversions.
OakInk: A Large-scale Knowledge Repository for Understanding Hand-Object Interaction
Mar 29, 2022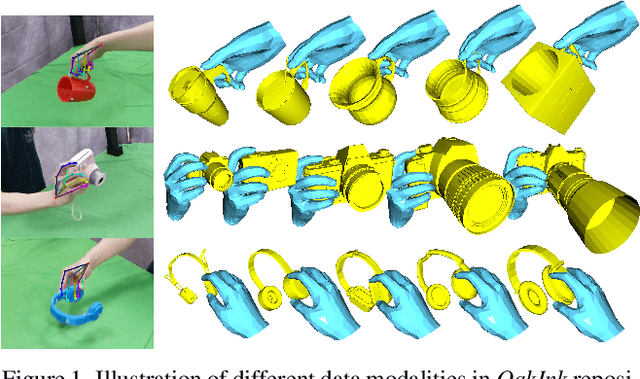
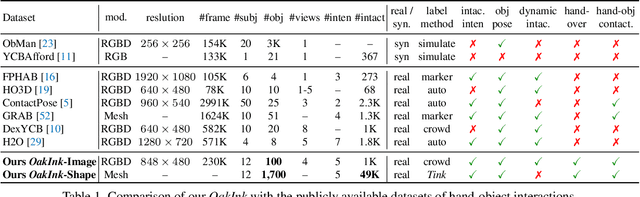
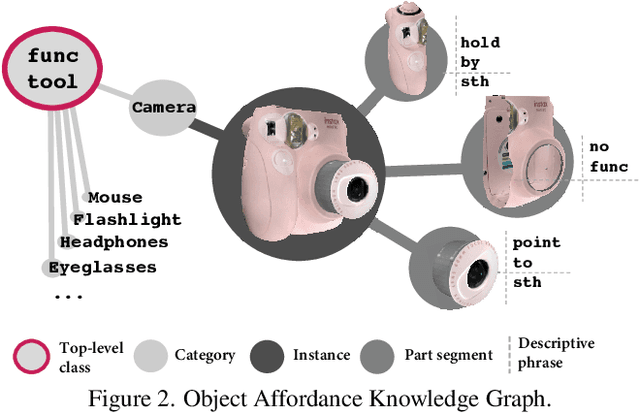
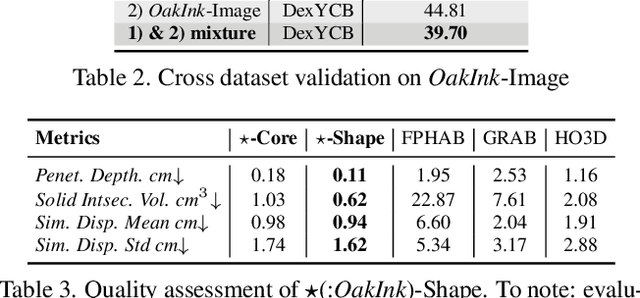
Learning how humans manipulate objects requires machines to acquire knowledge from two perspectives: one for understanding object affordances and the other for learning human's interactions based on the affordances. Even though these two knowledge bases are crucial, we find that current databases lack a comprehensive awareness of them. In this work, we propose a multi-modal and rich-annotated knowledge repository, OakInk, for visual and cognitive understanding of hand-object interactions. We start to collect 1,800 common household objects and annotate their affordances to construct the first knowledge base: Oak. Given the affordance, we record rich human interactions with 100 selected objects in Oak. Finally, we transfer the interactions on the 100 recorded objects to their virtual counterparts through a novel method: Tink. The recorded and transferred hand-object interactions constitute the second knowledge base: Ink. As a result, OakInk contains 50,000 distinct affordance-aware and intent-oriented hand-object interactions. We benchmark OakInk on pose estimation and grasp generation tasks. Moreover, we propose two practical applications of OakInk: intent-based interaction generation and handover generation. Our datasets and source code are publicly available at https://github.com/lixiny/OakInk.
Off-Road Drivable Area Extraction Using 3D LiDAR Data
Mar 10, 2020


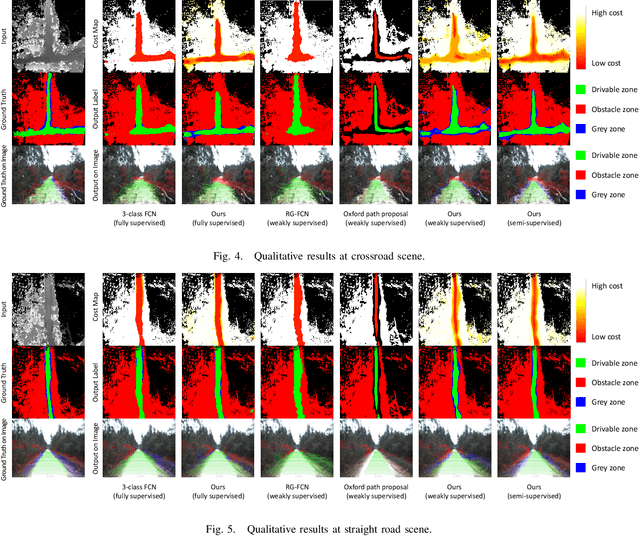
We propose a method for off-road drivable area extraction using 3D LiDAR data with the goal of autonomous driving application. A specific deep learning framework is designed to deal with the ambiguous area, which is one of the main challenges in the off-road environment. To reduce the considerable demand for human-annotated data for network training, we utilize the information from vast quantities of vehicle paths and auto-generated obstacle labels. Using these autogenerated annotations, the proposed network can be trained using weakly supervised or semi-supervised methods, which can achieve better performance with fewer human annotations. The experiments on our dataset illustrate the reasonability of our framework and the validity of our weakly and semi-supervised methods.