 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAWEMixer: Adaptive Wavelet-Enhanced Mixer Network for Long-Term Time Series Forecasting
Nov 06, 2025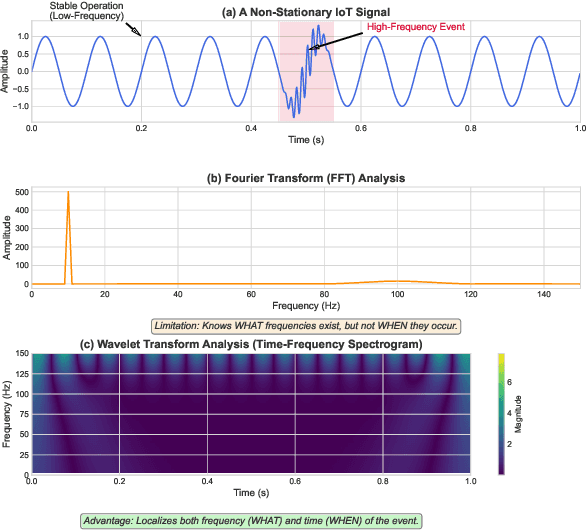
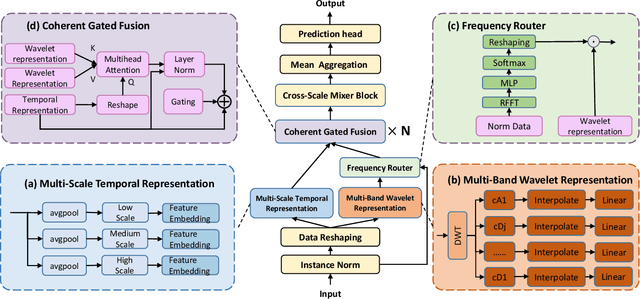
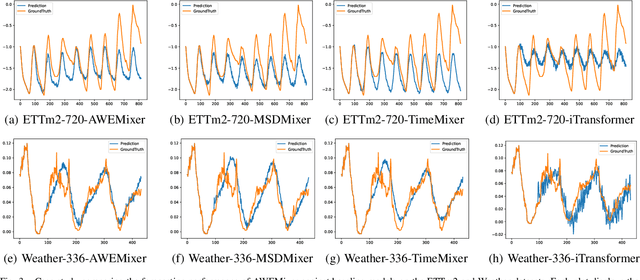
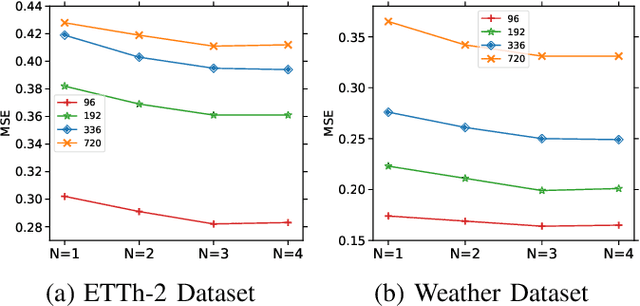
Forecasting long-term time series in IoT environments remains a significant challenge due to the non-stationary and multi-scale characteristics of sensor signals. Furthermore, error accumulation causes a decrease in forecast quality when predicting further into the future. Traditional methods are restricted to operate in time-domain, while the global frequency information achieved by Fourier transform would be regarded as stationary signals leading to blur the temporal patterns of transient events. We propose AWEMixer, an Adaptive Wavelet-Enhanced Mixer Network including two innovative components: 1) a Frequency Router designs to utilize the global periodicity pattern achieved by Fast Fourier Transform to adaptively weight localized wavelet subband, and 2) a Coherent Gated Fusion Block to achieve selective integration of prominent frequency features with multi-scale temporal representation through cross-attention and gating mechanism, which realizes accurate time-frequency localization while remaining robust to noise. Seven public benchmarks validate that our model is more effective than recent state-of-the-art models. Specifically, our model consistently achieves performance improvement compared with transformer-based and MLP-based state-of-the-art models in long-sequence time series forecasting. Code is available at https://github.com/hit636/AWEMixer
Adaptive Rectification Sampling for Test-Time Compute Scaling
Apr 02, 2025The newly released OpenAI-o1 and DeepSeek-R1 have demonstrated that test-time scaling can significantly improve model performance, especially in complex tasks such as logical reasoning. Common test-time scaling methods involve generating more chain of thoughts (CoTs) or longer CoTs with self-correction. However, while self-correction can improve performance, it may lead to significant token waste and reduce readability of the CoT if the reasoning steps are already correct. To demonstrate that large language models (LLMs) can rectify errors at a more fine-grained level, we propose Adaptive Rectification Sampling (AR-Sampling), which can guide the LLMs to self-correction at the appropriate step. AR-Sampling leverages a process-supervised reward model (PRM) as a verifier and constructed trigger sentences to guide the model in adaptive step-level rethinking. Through the experiments on GSM8K and MATH500, it indicate that our approach enables the models to rethink in more fine-grained level, improving the accuracy of solutions, while generating a reasonable number of additional tokens.
Understanding the Challenges When 3D Semantic Segmentation Faces Class Imbalanced and OOD Data
Mar 01, 2022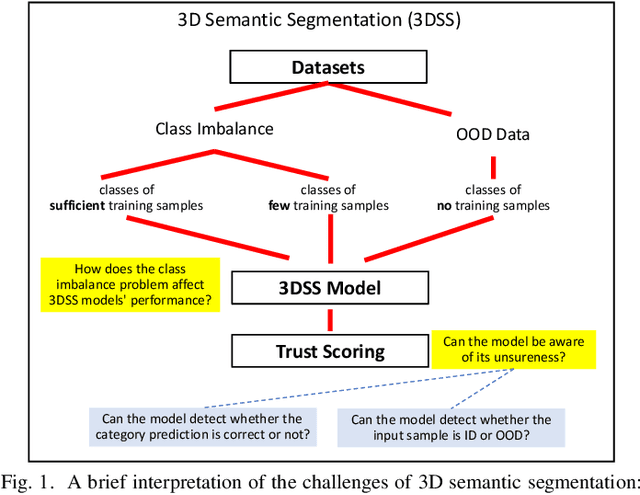

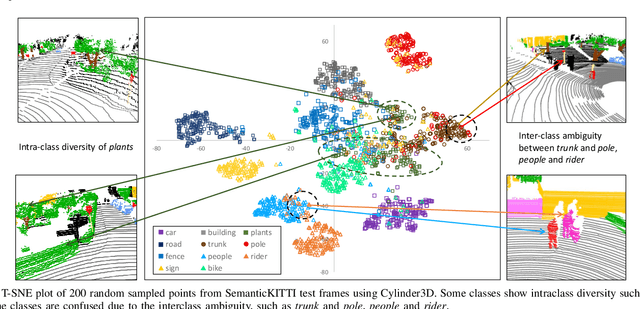

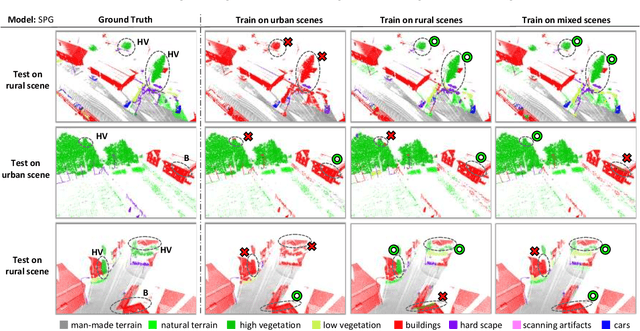
3D semantic segmentation (3DSS) is an essential process in the creation of a safe autonomous driving system. However, deep learning models for 3D semantic segmentation often suffer from the class imbalance problem and out-of-distribution (OOD) data. In this study, we explore how the class imbalance problem affects 3DSS performance and whether the model can detect the category prediction correctness, or whether data is ID (in-distribution) or OOD. For these purposes, we conduct two experiments using three representative 3DSS models and five trust scoring methods, and conduct both a confusion and feature analysis of each class. Furthermore, a data augmentation method for the 3D LiDAR dataset is proposed to create a new dataset based on SemanticKITTI and SemanticPOSS, called AugKITTI. We propose the wPre metric and TSD for a more in-depth analysis of the results, and follow are proposals with an insightful discussion. Based on the experimental results, we find that: (1) the classes are not only imbalanced in their data size but also in the basic properties of each semantic category. (2) The intraclass diversity and interclass ambiguity make class learning difficult and greatly limit the models' performance, creating the challenges of semantic and data gaps. (3) The trust scores are unreliable for classes whose features are confused with other classes. For 3DSS models, those misclassified ID classes and OODs may also be given high trust scores, making the 3DSS predictions unreliable, and leading to the challenges in judging 3DSS result trustworthiness. All of these outcomes point to several research directions for improving the performance and reliability of the 3DSS models used for real-world applications.
Are We Hungry for 3D LiDAR Data for Semantic Segmentation?
Jun 08, 2020
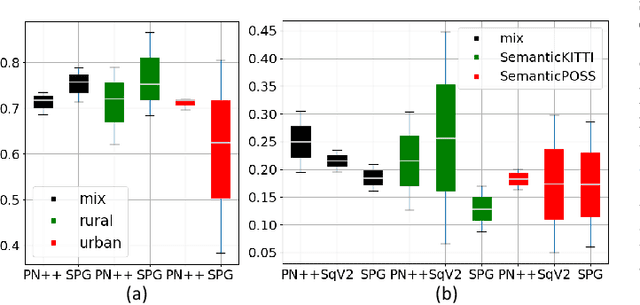
3D LiDAR semantic segmentation is a pivotal task that is widely involved in many applications, such as autonomous driving and robotics. Studies of 3D LiDAR semantic segmentation have recently achieved considerable development, especially in terms of deep learning strategies. However, these studies usually rely heavily on considerable fine annotated data, while point-wise 3D LiDAR datasets are extremely insufficient and expensive to label. The performance limitation caused by the lack of training data is called the data hungry effect. This survey aims to explore whether and how we are hungry for 3D LiDAR data for semantic segmentation. Thus, we first provide an organized review of existing 3D datasets and 3D semantic segmentation methods. Then, we provide an in-depth analysis of three representative datasets and several experiments to evaluate the data hungry effects in different aspects. Efforts to solve data hungry problems are summarized for both 3D LiDAR-focused methods and general-purpose methods. Finally, insightful topics are discussed for future research on data hungry problems and open questions.
Off-Road Drivable Area Extraction Using 3D LiDAR Data
Mar 10, 2020


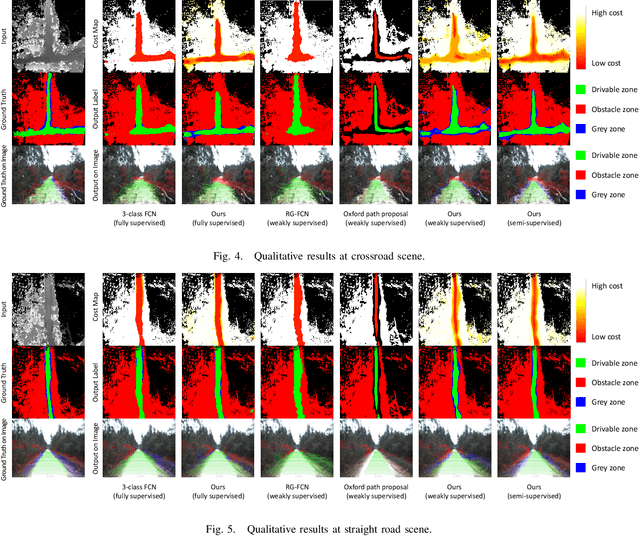
We propose a method for off-road drivable area extraction using 3D LiDAR data with the goal of autonomous driving application. A specific deep learning framework is designed to deal with the ambiguous area, which is one of the main challenges in the off-road environment. To reduce the considerable demand for human-annotated data for network training, we utilize the information from vast quantities of vehicle paths and auto-generated obstacle labels. Using these autogenerated annotations, the proposed network can be trained using weakly supervised or semi-supervised methods, which can achieve better performance with fewer human annotations. The experiments on our dataset illustrate the reasonability of our framework and the validity of our weakly and semi-supervised methods.
SemanticPOSS: A Point Cloud Dataset with Large Quantity of Dynamic Instances
Feb 21, 2020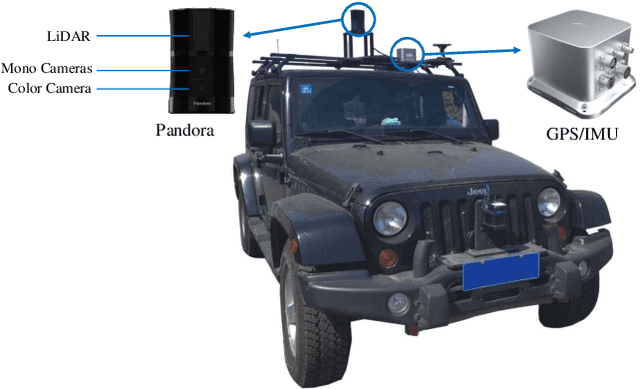
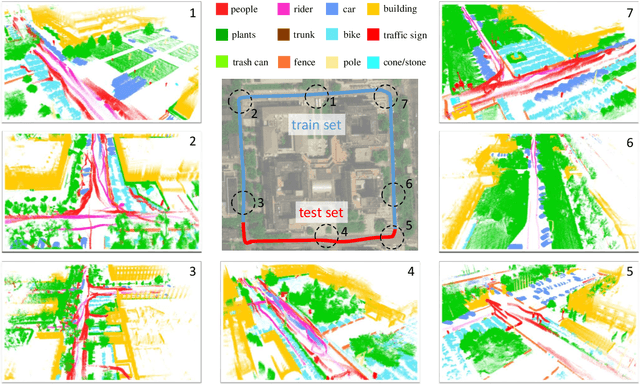

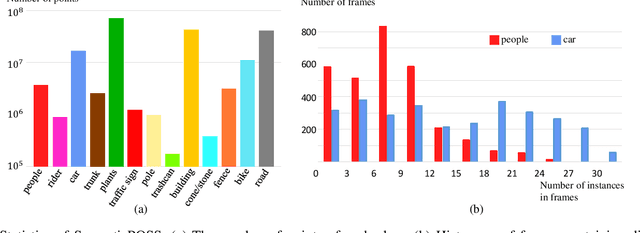
3D semantic segmentation is one of the key tasks for autonomous driving system. Recently, deep learning models for 3D semantic segmentation task have been widely researched, but they usually require large amounts of training data. However, the present datasets for 3D semantic segmentation are lack of point-wise annotation, diversiform scenes and dynamic objects. In this paper, we propose the SemanticPOSS dataset, which contains 2988 various and complicated LiDAR scans with large quantity of dynamic instances. The data is collected in Peking University and uses the same data format as SemanticKITTI. In addition, we evaluate several typical 3D semantic segmentation models on our SemanticPOSS dataset. Experimental results show that SemanticPOSS can help to improve the prediction accuracy of dynamic objects as people, car in some degree. SemanticPOSS will be published at \url{www.poss.pku.edu.cn}.