 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHera: Learning Long-Horizon Coordination for Device-Cloud Collaborative LLM Agents
May 23, 2026Large language model (LLM) agents excel at solving complex long-horizon tasks through autonomous interaction with environments. However, their real-world deployment faces a fundamental device--cloud dilemma: on-device models are efficient but often brittle, while cloud models are stronger but costly in computation. State-of-the-art LLM device--cloud routers usually make coarse task-level decisions, which cannot adapt to the changing difficulty of multi-step agent interactions. To address this issue, we present Hera, a step-level device--cloud LLM agent coordinator for long-horizon tasks achieving a strong performance--cost Pareto frontier. Hera adopts a novel two-stage training paradigm: (1) imitation learning for cold-start, followed by (2) reinforcement learning that jointly optimizes task success and cloud usage efficiency. The first stage casts step-level routing as a supervised classification problem: the device agent is replayed on cloud trajectories, with each state labeled by the agreement between device and cloud actions. In the second stage, we perform cost-aware reinforcement learning by grouping identical states across trajectories and updating Hera with labels favoring higher expected return and fewer future cloud calls. We evaluate Hera on ALFWorld, WebShop, and AppWorld, where it consistently outperforms prior methods, achieving 92.5% of the cloud-only success rate with cloud use in only 46.3% of steps.
A reinforcement learning based construction material supply strategy using robotic crane and computer vision for building reconstruction after an earthquake
Aug 30, 2023



After an earthquake, it is particularly important to provide the necessary resources on site because a large number of infrastructures need to be repaired or newly constructed. Due to the complex construction environment after the disaster, there are potential safety hazards for human labors working in this environment. With the advancement of robotic technology and artificial intelligent (AI) algorithms, smart robotic technology is the potential solution to provide construction resources after an earthquake. In this paper, the robotic crane with advanced AI algorithms is proposed to provide resources for infrastructure reconstruction after an earthquake. The proximal policy optimization (PPO), a reinforcement learning (RL) algorithm, is implemented for 3D lift path planning when transporting the construction materials. The state and reward function are designed in detail for RL model training. Two models are trained through a loading task in different environments by using PPO algorithm, one considering the influence of obstacles and the other not considering obstacles. Then, the two trained models are compared and evaluated through an unloading task and a loading task in simulation environments. For each task, two different cases are considered. One is that there is no obstacle between the initial position where the construction material is lifted and the target position, and the other is that there are obstacles between the initial position and the target position. The results show that the model that considering the obstacles during training can generate proper actions for the robotic crane to execute so that the crane can automatically transport the construction materials to the desired location with swing suppression, short time consumption and collision avoidance.
Understanding the Challenges When 3D Semantic Segmentation Faces Class Imbalanced and OOD Data
Mar 01, 2022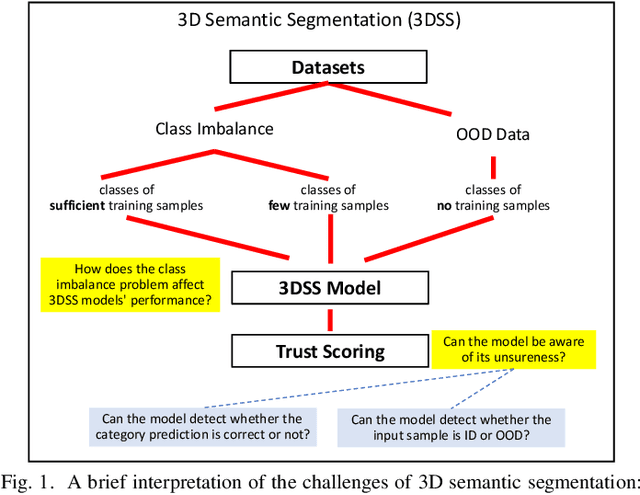

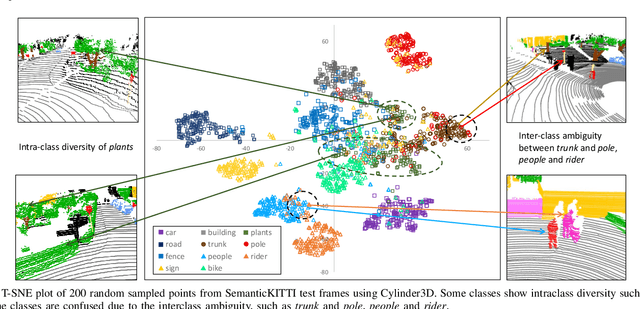

3D semantic segmentation (3DSS) is an essential process in the creation of a safe autonomous driving system. However, deep learning models for 3D semantic segmentation often suffer from the class imbalance problem and out-of-distribution (OOD) data. In this study, we explore how the class imbalance problem affects 3DSS performance and whether the model can detect the category prediction correctness, or whether data is ID (in-distribution) or OOD. For these purposes, we conduct two experiments using three representative 3DSS models and five trust scoring methods, and conduct both a confusion and feature analysis of each class. Furthermore, a data augmentation method for the 3D LiDAR dataset is proposed to create a new dataset based on SemanticKITTI and SemanticPOSS, called AugKITTI. We propose the wPre metric and TSD for a more in-depth analysis of the results, and follow are proposals with an insightful discussion. Based on the experimental results, we find that: (1) the classes are not only imbalanced in their data size but also in the basic properties of each semantic category. (2) The intraclass diversity and interclass ambiguity make class learning difficult and greatly limit the models' performance, creating the challenges of semantic and data gaps. (3) The trust scores are unreliable for classes whose features are confused with other classes. For 3DSS models, those misclassified ID classes and OODs may also be given high trust scores, making the 3DSS predictions unreliable, and leading to the challenges in judging 3DSS result trustworthiness. All of these outcomes point to several research directions for improving the performance and reliability of the 3DSS models used for real-world applications.
Deep Imitation Learning for Bimanual Robotic Manipulation
Oct 11, 2020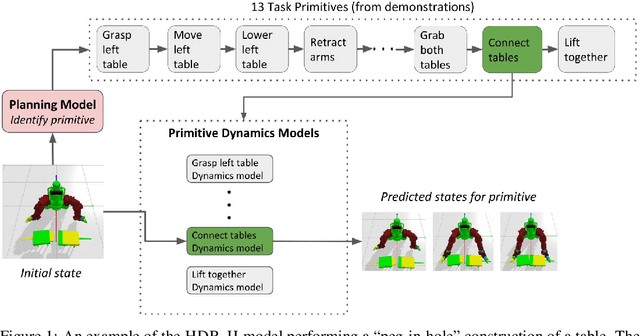
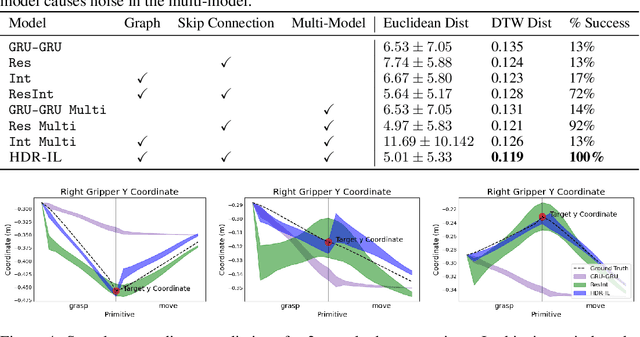
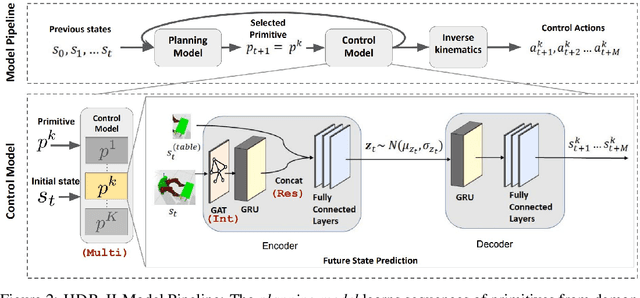
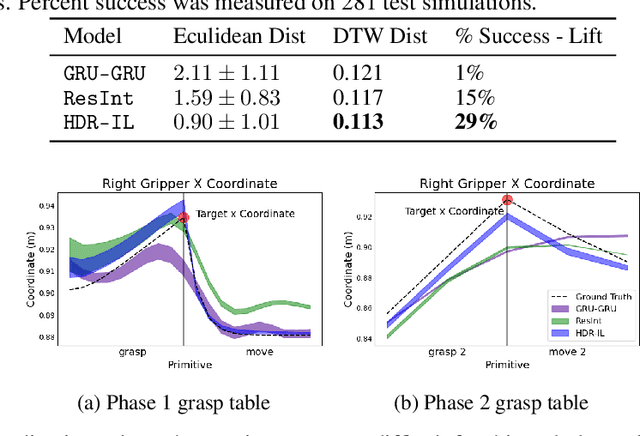
We present a deep imitation learning framework for robotic bimanual manipulation in a continuous state-action space. Imitation learning has been effectively utilized in mimicking bimanual manipulation movements, but generalizing the movement to objects in different locations has not been explored. We hypothesize that to precisely generalize the learned behavior relative to an object's location requires modeling relational information in the environment. To achieve this, we designed a method that (i) uses a multi-model framework to decomposes complex dynamics into elemental movement primitives, and (ii) parameterizes each primitive using a recurrent graph neural network to capture interactions. Our model is a deep, hierarchical, modular architecture with a high-level planner that learns to compose primitives sequentially and a low-level controller which integrates primitive dynamics modules and inverse kinematics control. We demonstrate the effectiveness using several simulated bimanual robotic manipulation tasks. Compared to models based on previous imitation learning studies, our model generalizes better and achieves higher success rates in the simulated tasks.