 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePost-disaster building indoor damage and survivor detection using autonomous path planning and deep learning with unmanned aerial vehicles
Mar 13, 2025



Rapid response to natural disasters such as earthquakes is a crucial element in ensuring the safety of civil infrastructures and minimizing casualties. Traditional manual inspection is labour-intensive, time-consuming, and can be dangerous for inspectors and rescue workers. This paper proposed an autonomous inspection approach for structural damage inspection and survivor detection in the post-disaster building indoor scenario, which incorporates an autonomous navigation method, deep learning-based damage and survivor detection method, and a customized low-cost micro aerial vehicle (MAV) with onboard sensors. Experimental studies in a pseudo-post-disaster office building have shown the proposed methodology can achieve high accuracy in structural damage inspection and survivor detection. Overall, the proposed inspection approach shows great potential to improve the efficiency of existing manual post-disaster building inspection.
Vision-aided nonlinear control framework for shake table tests
Sep 01, 2023The structural response under the earthquake excitations can be simulated by scaled-down model shake table tests or full-scale model shake table tests. In this paper, adaptive control theory is used as a nonlinear shake table control algorithm which considers the inherent nonlinearity of the shake table system and the Control-Structural Interaction (CSI) effect that the linear controller cannot consider, such as the Proportional-Integral-Derivative (PID) controller. The mass of the specimen can be assumed as an unknown variation and the unknown parameter will be replaced by an estimated value in the proposed control framework. The signal generated by the control law of the adaptive control method will be implemented by a loop-shaping controller. To verify the stability and feasibility of the proposed control framework, a simulation of a bare shake table and experiments with a bare shake table with a two-story frame were carried out. This study randomly selects Earthquake recordings from the Pacific Earthquake Engineering Research Center (PEER) database. The simulation and experimental results show that the proposed control framework can be effectively used in shake table control.
Autonomous damage assessment of structural columns using low-cost micro aerial vehicles and multi-view computer vision
Aug 30, 2023Structural columns are the crucial load-carrying components of buildings and bridges. Early detection of column damage is important for the assessment of the residual performance and the prevention of system-level collapse. This research proposes an innovative end-to-end micro aerial vehicles (MAVs)-based approach to automatically scan and inspect columns. First, an MAV-based automatic image collection method is proposed. The MAV is programmed to sense the structural columns and their surrounding environment. During the navigation, the MAV first detects and approaches the structural columns. Then, it starts to collect image data at multiple viewpoints around every detected column. Second, the collected images will be used to assess the damage types and damage locations. Third, the damage state of the structural column will be determined by fusing the evaluation outcomes from multiple camera views. In this study, reinforced concrete (RC) columns are selected to demonstrate the effectiveness of the approach. Experimental results indicate that the proposed MAV-based inspection approach can effectively collect images from multiple viewing angles, and accurately assess critical RC column damages. The approach improves the level of autonomy during the inspection. In addition, the evaluation outcomes are more comprehensive than the existing 2D vision methods. The concept of the proposed inspection approach can be extended to other structural columns such as bridge piers.
A reinforcement learning based construction material supply strategy using robotic crane and computer vision for building reconstruction after an earthquake
Aug 30, 2023



After an earthquake, it is particularly important to provide the necessary resources on site because a large number of infrastructures need to be repaired or newly constructed. Due to the complex construction environment after the disaster, there are potential safety hazards for human labors working in this environment. With the advancement of robotic technology and artificial intelligent (AI) algorithms, smart robotic technology is the potential solution to provide construction resources after an earthquake. In this paper, the robotic crane with advanced AI algorithms is proposed to provide resources for infrastructure reconstruction after an earthquake. The proximal policy optimization (PPO), a reinforcement learning (RL) algorithm, is implemented for 3D lift path planning when transporting the construction materials. The state and reward function are designed in detail for RL model training. Two models are trained through a loading task in different environments by using PPO algorithm, one considering the influence of obstacles and the other not considering obstacles. Then, the two trained models are compared and evaluated through an unloading task and a loading task in simulation environments. For each task, two different cases are considered. One is that there is no obstacle between the initial position where the construction material is lifted and the target position, and the other is that there are obstacles between the initial position and the target position. The results show that the model that considering the obstacles during training can generate proper actions for the robotic crane to execute so that the crane can automatically transport the construction materials to the desired location with swing suppression, short time consumption and collision avoidance.
Dynamic Analysis of Nonlinear Civil Engineering Structures using Artificial Neural Network with Adaptive Training
Nov 21, 2021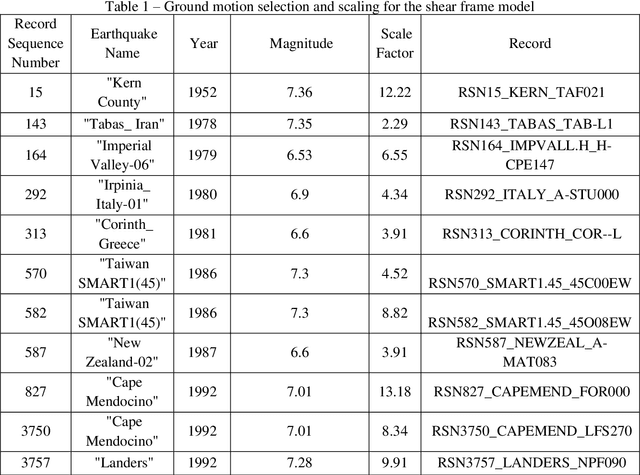
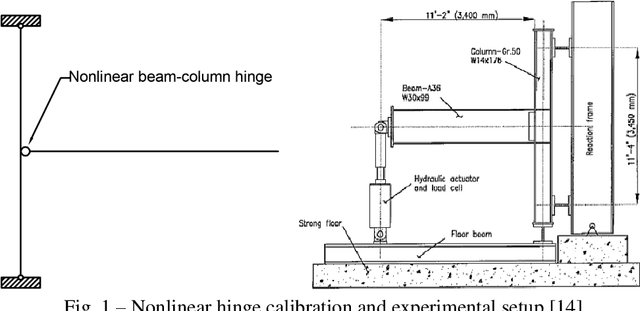
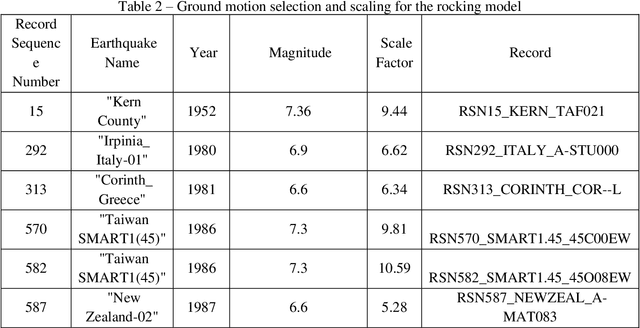
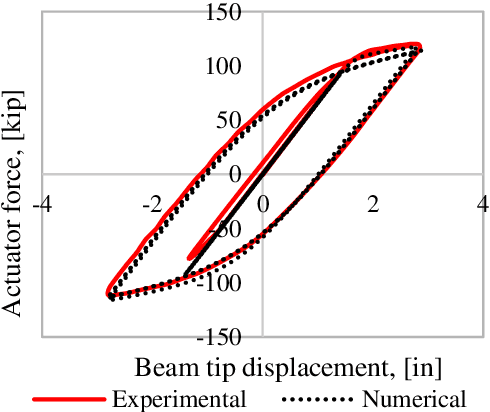
Dynamic analysis of structures subjected to earthquake excitation is a time-consuming process, particularly in the case of extremely small time step required, or in the presence of high geometric and material nonlinearity. Performing parametric studies in such cases is even more tedious. The advancement of computer graphics hardware in recent years enables efficient training of artificial neural networks that are well-known to be capable of learning highly nonlinear mappings. In this study, artificial neural networks are developed with adaptive training algorithms, which enables automatic nodes generation and layers addition. The hyperbolic tangent function is selected as the activation function. Stochastic Gradient Descent and Back Propagation algorithms are adopted to train the networks. The neural networks initiate with a small number of hidden layers and nodes. During training, the performance of the network is continuously tracked, and new nodes or layers are added to the hidden layers if the neural network reaches its capacity. At the end of the training process, the network with appropriate architecture is automatically formed. The performance of the networks has been validated for inelastic shear frames, as well as rocking structures, of which both are first built in finite element program for dynamic analysis to generate training data. Results have shown the developed networks can successfully predict the time-history response of the shear frame and the rock structure subjected to real ground motion records. The efficiency of the proposed neural networks is also examined, which shows the computational time can be reduced by 43% by the neural networks method than FE models. This indicates the trained networks can be utilized to generate rocking spectrums of structures more efficiently which demands a large number of time-history analyses.
A Novel Approach for Deterioration and Damage Identification in Building Structures Based on Stockwell-Transform and Deep Convolutional Neural Network
Nov 16, 2021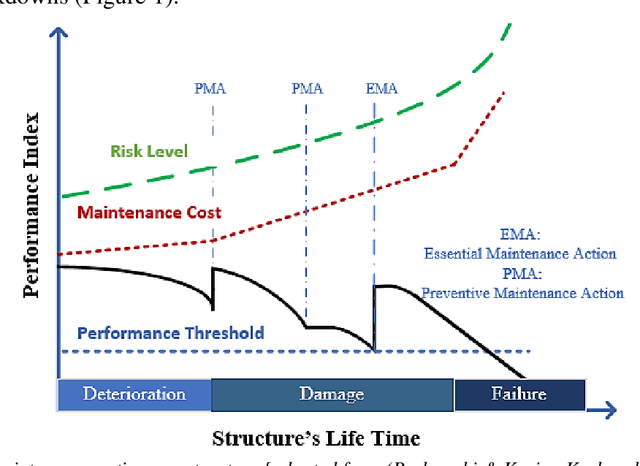
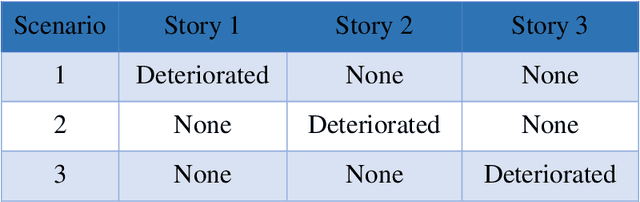
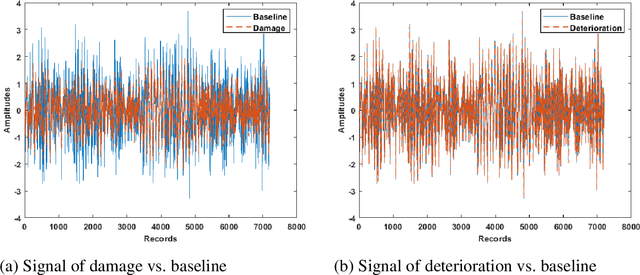
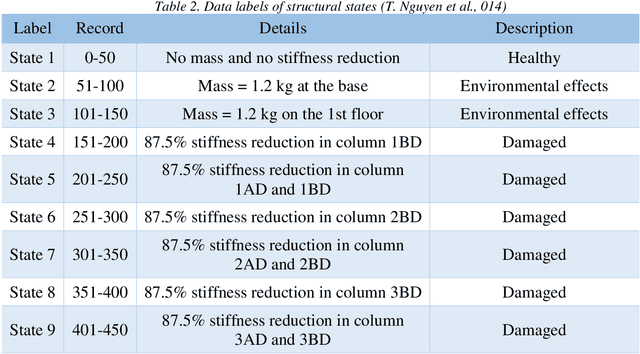
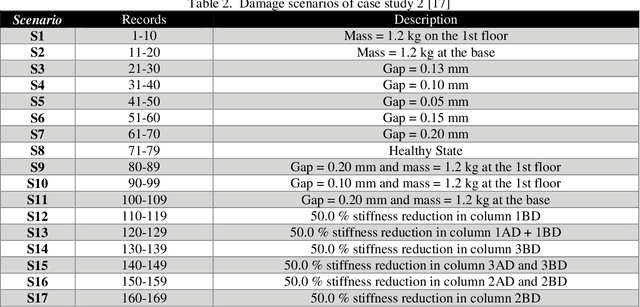
In this paper, a novel deterioration and damage identification procedure (DIP) is presented and applied to building models. The challenge associated with applications on these types of structures is related to the strong correlation of responses, which gets further complicated when coping with real ambient vibrations with high levels of noise. Thus, a DIP is designed utilizing low-cost ambient vibrations to analyze the acceleration responses using the Stockwell transform (ST) to generate spectrograms. Subsequently, the ST outputs become the input of two series of Convolutional Neural Networks (CNNs) established for identifying deterioration and damage to the building models. To the best of our knowledge, this is the first time that both damage and deterioration are evaluated on building models through a combination of ST and CNN with high accuracy.
A Data-Driven Approach for Linear and Nonlinear Damage Detection Using Variational Mode Decomposition and GARCH Model
Nov 16, 2021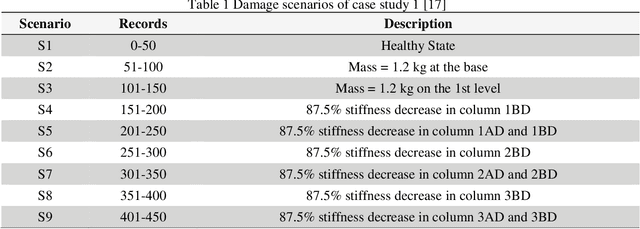


In this article, an original data-driven approach is proposed to detect both linear and nonlinear damage in structures using output-only responses. The method deploys variational mode decomposition (VMD) and a generalised autoregressive conditional heteroscedasticity (GARCH) model for signal processing and feature extraction. To this end, VMD decomposes the response signals into intrinsic mode functions (IMFs). Afterwards, the GARCH model is utilised to represent the statistics of IMFs. The model coefficients of IMFs construct the primary feature vector. Kernel-based principal component analysis (PCA) and linear discriminant analysis (LDA) are utilised to reduce the redundancy of the primary features by mapping them to the new feature space. The informative features are then fed separately into three supervised classifiers, namely support vector machine (SVM), k-nearest neighbour (kNN), and fine tree. The performance of the proposed method is evaluated on two experimentally scaled models in terms of linear and nonlinear damage assessment. Kurtosis and ARCH tests proved the compatibility of the GARCH model.
Image-based monitoring of bolt loosening through deep-learning-based integrated detection and tracking
Nov 16, 2021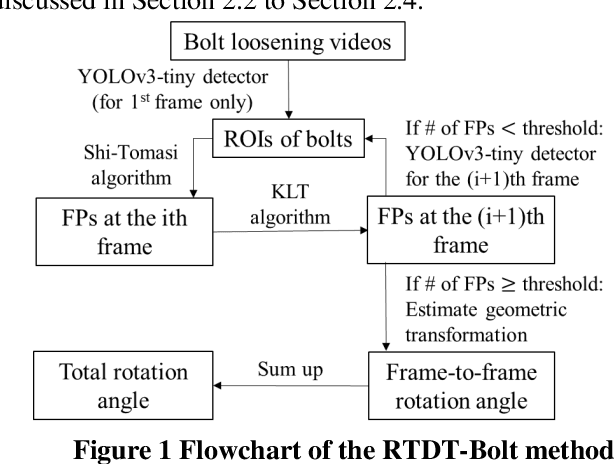
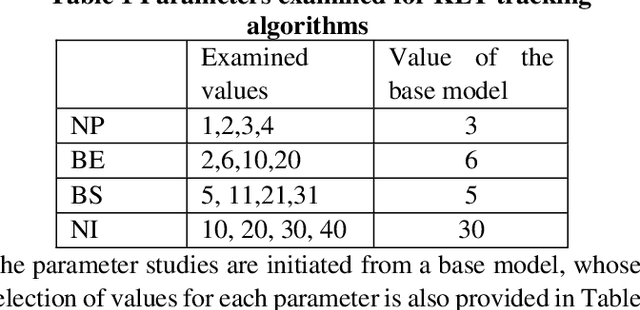
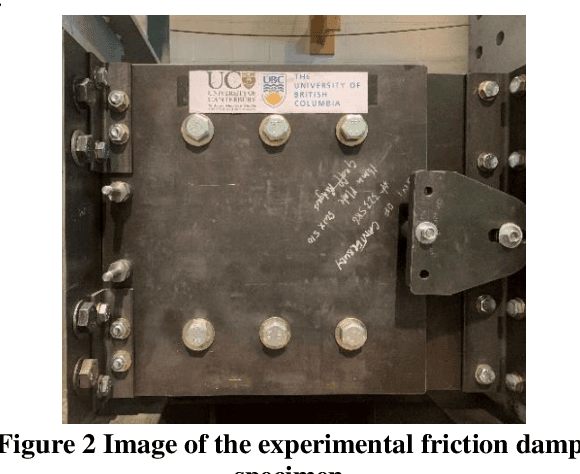
Structural bolts are critical components used in different structural elements, such as beam-column connections and friction damping devices. The clamping force in structural bolts is highly influenced by the bolt rotation. Much of the existing vision-based research about bolt rotation estimation relies on traditional computer vision algorithms such as Hough Transform to assess static images of bolts. This requires careful image preprocessing, and it may not perform well in the situation of complicated bolt assemblies, or in the presence of surrounding objects and background noise, thus hindering their real-world applications. In this study, an integrated real-time detect-track method, namely RTDT-Bolt, is proposed to monitor the bolt rotation angle. First, a real-time convolutional-neural-networks-based object detector, named YOLOv3-tiny, is established and trained to localize structural bolts. Then, the target-free object tracking algorithm based on optical flow is implemented, to continuously monitor and quantify the rotation of structural bolts. In order to enhance the tracking performance against background noise and potential illumination changes during tracking, the YOLOv3-tiny is integrated with the optical flow tracking algorithm to re-detect the bolts when the tracking gets lost. Extensive parameter studies were conducted to identify optimal tracking performance and examine the potential limitations. The results indicate the RTDT-Bolt method can greatly enhance the tracking performance of bolt rotation, which can achieve over 90% accuracy using the recommended range for the parameters.
Postdisaster image-based damage detection and repair cost estimation of reinforced concrete buildings using dual convolutional neural networks
Nov 16, 2021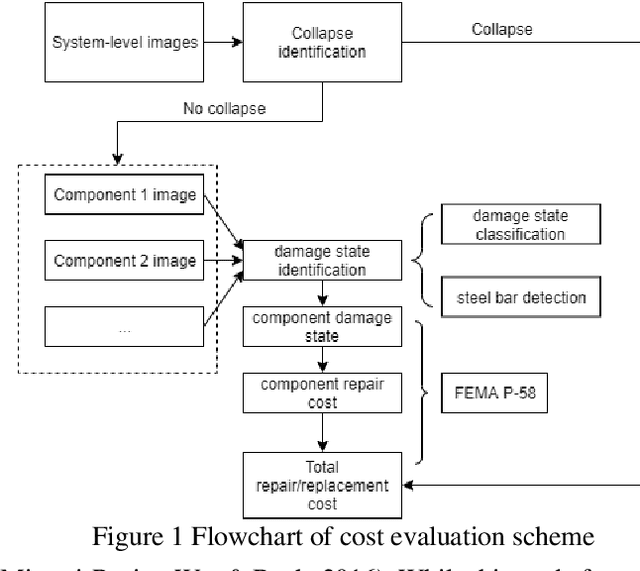
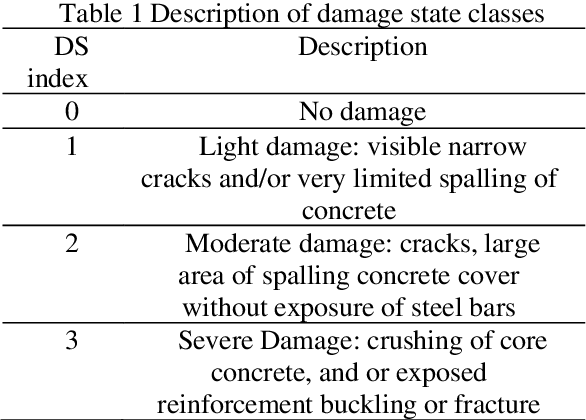

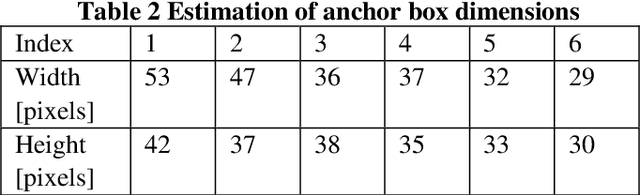
Reinforced concrete buildings are commonly used around the world. With recent earthquakes worldwide, rapid structural damage inspection and repair cost evaluation are crucial for building owners and policy makers to make informed risk management decisions. To improve the efficiency of such inspection, advanced computer vision techniques based on convolution neural networks have been adopted in recent research to rapidly quantify the damage state of structures. In this paper, an advanced object detection neural network, named YOLO-v2, is implemented which achieves 98.2% and 84.5% average precision in training and testing, respectively. The proposed YOLO-v2 is used in combination with the classification neural network, which improves the identification accuracy for critical damage state of reinforced concrete structures by 7.5%. The improved classification procedures allow engineers to rapidly and more accurately quantify the damage states of the structure, and also localize the critical damage features. The identified damage state can then be integrated with the state-of-the-art performance evaluation framework to quantify the financial losses of critical reinforced concrete buildings. The results can be used by the building owners and decision makers to make informed risk management decisions immediately after the strong earthquake shaking. Hence, resources can be allocated rapidly to improve the resiliency of the community.
* 16 pages, 21 figures