 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative AI in Embodied Systems: System-Level Analysis of Performance, Efficiency and Scalability
Apr 26, 2025Embodied systems, where generative autonomous agents engage with the physical world through integrated perception, cognition, action, and advanced reasoning powered by large language models (LLMs), hold immense potential for addressing complex, long-horizon, multi-objective tasks in real-world environments. However, deploying these systems remains challenging due to prolonged runtime latency, limited scalability, and heightened sensitivity, leading to significant system inefficiencies. In this paper, we aim to understand the workload characteristics of embodied agent systems and explore optimization solutions. We systematically categorize these systems into four paradigms and conduct benchmarking studies to evaluate their task performance and system efficiency across various modules, agent scales, and embodied tasks. Our benchmarking studies uncover critical challenges, such as prolonged planning and communication latency, redundant agent interactions, complex low-level control mechanisms, memory inconsistencies, exploding prompt lengths, sensitivity to self-correction and execution, sharp declines in success rates, and reduced collaboration efficiency as agent numbers increase. Leveraging these profiling insights, we suggest system optimization strategies to improve the performance, efficiency, and scalability of embodied agents across different paradigms. This paper presents the first system-level analysis of embodied AI agents, and explores opportunities for advancing future embodied system design.
A2Perf: Real-World Autonomous Agents Benchmark
Mar 04, 2025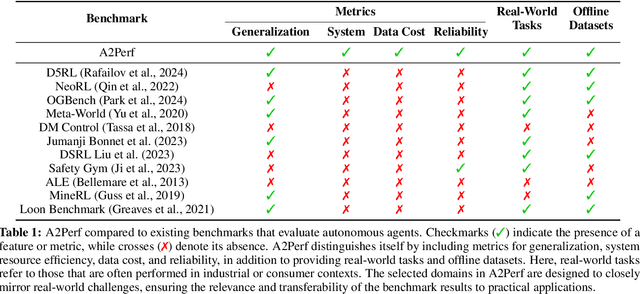
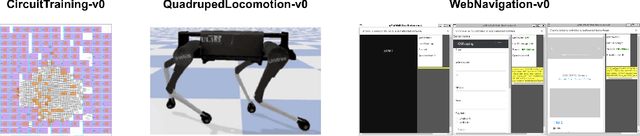
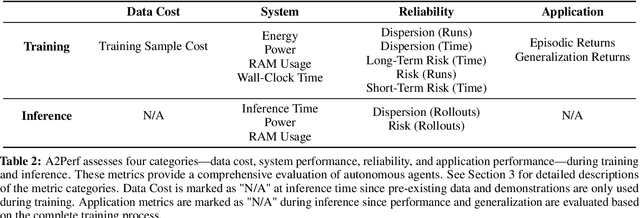
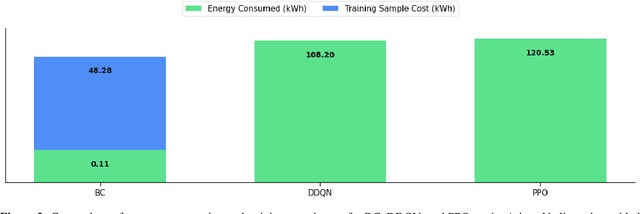
Autonomous agents and systems cover a number of application areas, from robotics and digital assistants to combinatorial optimization, all sharing common, unresolved research challenges. It is not sufficient for agents to merely solve a given task; they must generalize to out-of-distribution tasks, perform reliably, and use hardware resources efficiently during training and inference, among other requirements. Several methods, such as reinforcement learning and imitation learning, are commonly used to tackle these problems, each with different trade-offs. However, there is a lack of benchmarking suites that define the environments, datasets, and metrics which can be used to provide a meaningful way for the community to compare progress on applying these methods to real-world problems. We introduce A2Perf--a benchmark with three environments that closely resemble real-world domains: computer chip floorplanning, web navigation, and quadruped locomotion. A2Perf provides metrics that track task performance, generalization, system resource efficiency, and reliability, which are all critical to real-world applications. Using A2Perf, we demonstrate that web navigation agents can achieve latencies comparable to human reaction times on consumer hardware, reveal reliability trade-offs between algorithms for quadruped locomotion, and quantify the energy costs of different learning approaches for computer chip-design. In addition, we propose a data cost metric to account for the cost incurred acquiring offline data for imitation learning and hybrid algorithms, which allows us to better compare these approaches. A2Perf also contains several standard baselines, enabling apples-to-apples comparisons across methods and facilitating progress in real-world autonomy. As an open-source benchmark, A2Perf is designed to remain accessible, up-to-date, and useful to the research community over the long term.
Generative AI Agents in Autonomous Machines: A Safety Perspective
Oct 20, 2024



The integration of Generative Artificial Intelligence (AI) into autonomous machines represents a major paradigm shift in how these systems operate and unlocks new solutions to problems once deemed intractable. Although generative AI agents provide unparalleled capabilities, they also have unique safety concerns. These challenges require robust safeguards, especially for autonomous machines that operate in high-stakes environments. This work investigates the evolving safety requirements when generative models are integrated as agents into physical autonomous machines, comparing these to safety considerations in less critical AI applications. We explore the challenges and opportunities to ensure the safe deployment of generative AI-driven autonomous machines. Furthermore, we provide a forward-looking perspective on the future of AI-driven autonomous systems and emphasize the importance of evaluating and communicating safety risks. As an important step towards addressing these concerns, we recommend the development and implementation of comprehensive safety scorecards for the use of generative AI technologies in autonomous machines.
RobotPerf: An Open-Source, Vendor-Agnostic, Benchmarking Suite for Evaluating Robotics Computing System Performance
Sep 17, 2023
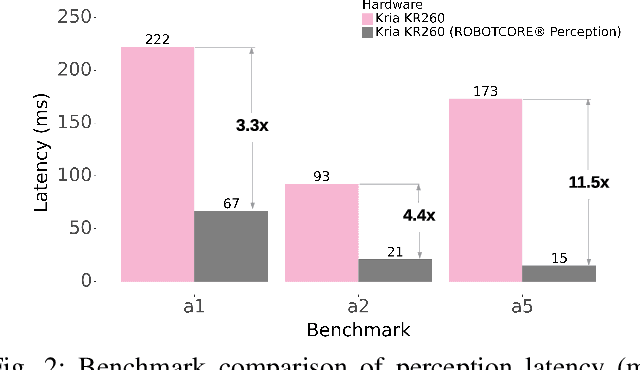

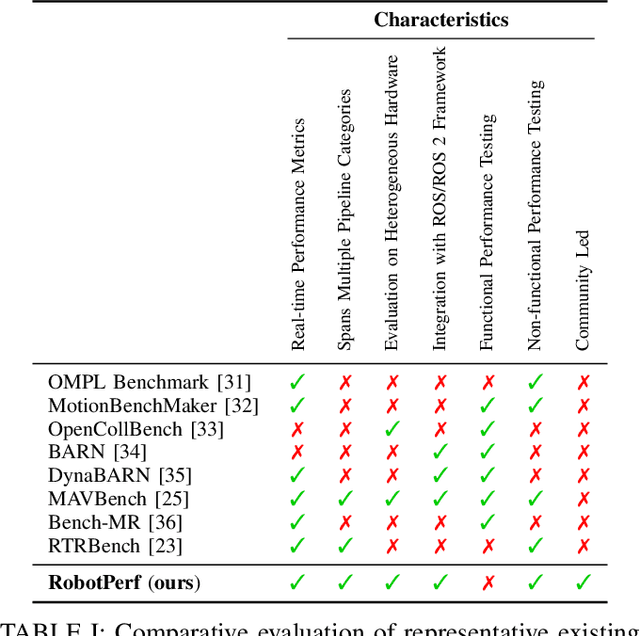
We introduce RobotPerf, a vendor-agnostic benchmarking suite designed to evaluate robotics computing performance across a diverse range of hardware platforms using ROS 2 as its common baseline. The suite encompasses ROS 2 packages covering the full robotics pipeline and integrates two distinct benchmarking approaches: black-box testing, which measures performance by eliminating upper layers and replacing them with a test application, and grey-box testing, an application-specific measure that observes internal system states with minimal interference. Our benchmarking framework provides ready-to-use tools and is easily adaptable for the assessment of custom ROS 2 computational graphs. Drawing from the knowledge of leading robot architects and system architecture experts, RobotPerf establishes a standardized approach to robotics benchmarking. As an open-source initiative, RobotPerf remains committed to evolving with community input to advance the future of hardware-accelerated robotics.
ArchGym: An Open-Source Gymnasium for Machine Learning Assisted Architecture Design
Jun 15, 2023Machine learning is a prevalent approach to tame the complexity of design space exploration for domain-specific architectures. Using ML for design space exploration poses challenges. First, it's not straightforward to identify the suitable algorithm from an increasing pool of ML methods. Second, assessing the trade-offs between performance and sample efficiency across these methods is inconclusive. Finally, lack of a holistic framework for fair, reproducible, and objective comparison across these methods hinders progress of adopting ML-aided architecture design space exploration and impedes creating repeatable artifacts. To mitigate these challenges, we introduce ArchGym, an open-source gym and easy-to-extend framework that connects diverse search algorithms to architecture simulators. To demonstrate utility, we evaluate ArchGym across multiple vanilla and domain-specific search algorithms in designing custom memory controller, deep neural network accelerators, and custom SoC for AR/VR workloads, encompassing over 21K experiments. Results suggest that with unlimited samples, ML algorithms are equally favorable to meet user-defined target specification if hyperparameters are tuned; no solution is necessarily better than another (e.g., reinforcement learning vs. Bayesian methods). We coin the term hyperparameter lottery to describe the chance for a search algorithm to find an optimal design provided meticulously selected hyperparameters. The ease of data collection and aggregation in ArchGym facilitates research in ML-aided architecture design space exploration. As a case study, we show this advantage by developing a proxy cost model with an RMSE of 0.61% that offers a 2,000-fold reduction in simulation time. Code and data for ArchGym is available at https://bit.ly/ArchGym.
Tiny Robot Learning: Challenges and Directions for Machine Learning in Resource-Constrained Robots
May 11, 2022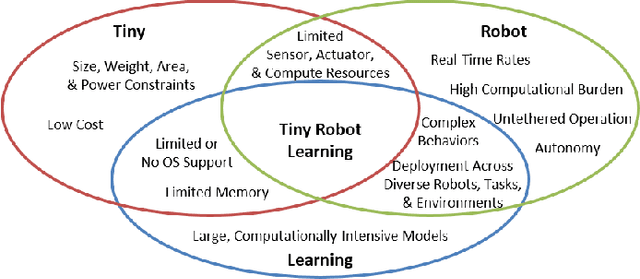
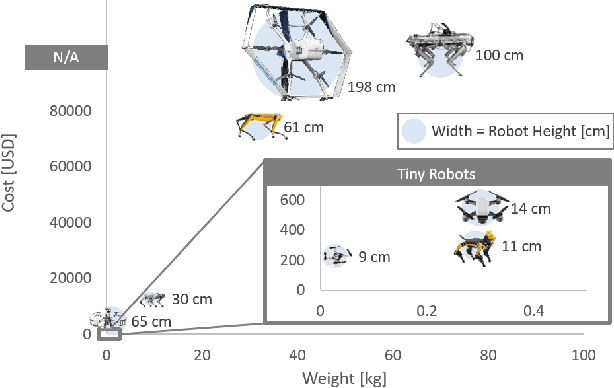
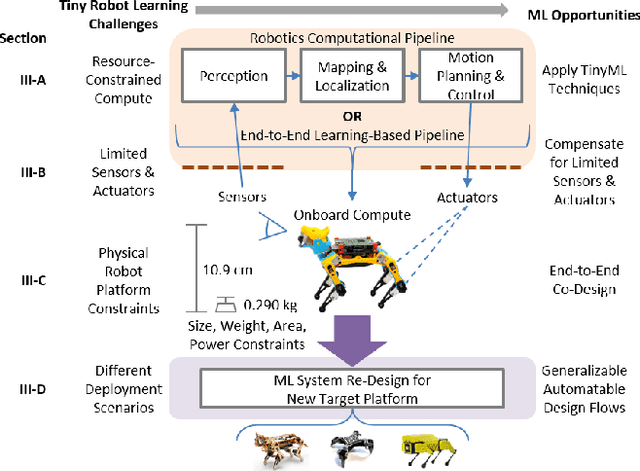
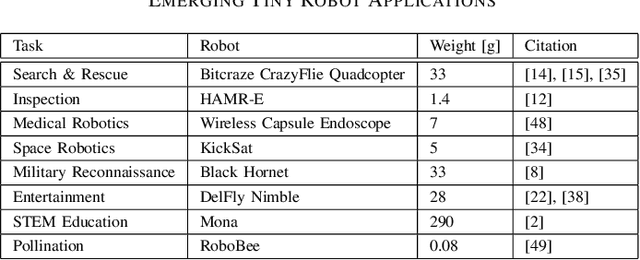
Machine learning (ML) has become a pervasive tool across computing systems. An emerging application that stress-tests the challenges of ML system design is tiny robot learning, the deployment of ML on resource-constrained low-cost autonomous robots. Tiny robot learning lies at the intersection of embedded systems, robotics, and ML, compounding the challenges of these domains. Tiny robot learning is subject to challenges from size, weight, area, and power (SWAP) constraints; sensor, actuator, and compute hardware limitations; end-to-end system tradeoffs; and a large diversity of possible deployment scenarios. Tiny robot learning requires ML models to be designed with these challenges in mind, providing a crucible that reveals the necessity of holistic ML system design and automated end-to-end design tools for agile development. This paper gives a brief survey of the tiny robot learning space, elaborates on key challenges, and proposes promising opportunities for future work in ML system design.