 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffensive Robot Cybersecurity
Jun 18, 2025Offensive Robot Cybersecurity introduces a groundbreaking approach by advocating for offensive security methods empowered by means of automation. It emphasizes the necessity of understanding attackers' tactics and identifying vulnerabilities in advance to develop effective defenses, thereby improving robots' security posture. This thesis leverages a decade of robotics experience, employing Machine Learning and Game Theory to streamline the vulnerability identification and exploitation process. Intrinsically, the thesis uncovers a profound connection between robotic architecture and cybersecurity, highlighting that the design and creation aspect of robotics deeply intertwines with its protection against attacks. This duality -- whereby the architecture that shapes robot behavior and capabilities also necessitates a defense mechanism through offensive and defensive cybersecurity strategies -- creates a unique equilibrium. Approaching cybersecurity with a dual perspective of defense and attack, rooted in an understanding of systems architecture, has been pivotal. Through comprehensive analysis, including ethical considerations, the development of security tools, and executing cyber attacks on robot software, hardware, and industry deployments, this thesis proposes a novel architecture for cybersecurity cognitive engines. These engines, powered by advanced game theory and machine learning, pave the way for autonomous offensive cybersecurity strategies for robots, marking a significant shift towards self-defending robotic systems. This research not only underscores the importance of offensive measures in enhancing robot cybersecurity but also sets the stage for future advancements where robots are not just resilient to cyber threats but are equipped to autonomously safeguard themselves.
ROS 2 on a Chip, Achieving Brain-Like Speeds and Efficiency in Robotic Networking
Apr 28, 2024The Robot Operating System (ROS) pubsub model played a pivotal role in developing sophisticated robotic applications. However, the complexities and real-time demands of modern robotics necessitate more efficient communication solutions that are deterministic and isochronous. This article introduces a groundbreaking approach: embedding ROS 2 message-passing infrastructure directly onto a specialized hardware chip, significantly enhancing speed and efficiency in robotic communications. Our FPGA prototypes of the chip design can send or receive packages in less than 2.5 microseconds, accelerating networking communications by more than 62x on average and improving energy consumption by more than 500x when compared to traditional ROS 2 software implementations on modern CPUs. Additionally, it dramatically reduces maximum latency in ROS 2 networking communication by more than 30,000x. In situations of peak latency, our design guarantees an isochronous response within 11 microseconds, a stark improvement over the potential hundreds of milliseconds reported by modern CPU systems under similar conditions.
RobotPerf: An Open-Source, Vendor-Agnostic, Benchmarking Suite for Evaluating Robotics Computing System Performance
Sep 17, 2023
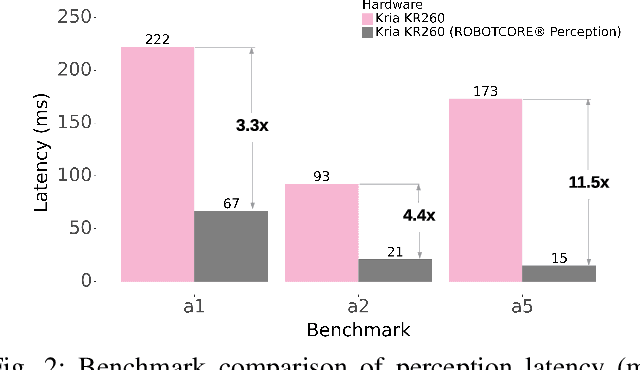

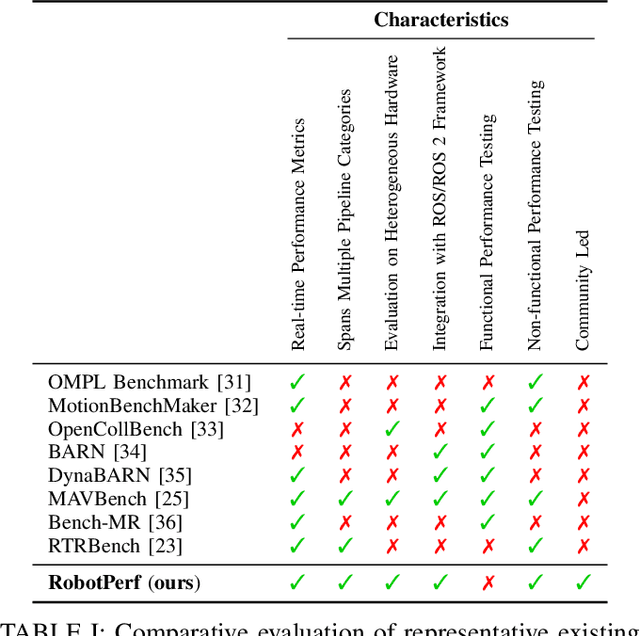
We introduce RobotPerf, a vendor-agnostic benchmarking suite designed to evaluate robotics computing performance across a diverse range of hardware platforms using ROS 2 as its common baseline. The suite encompasses ROS 2 packages covering the full robotics pipeline and integrates two distinct benchmarking approaches: black-box testing, which measures performance by eliminating upper layers and replacing them with a test application, and grey-box testing, an application-specific measure that observes internal system states with minimal interference. Our benchmarking framework provides ready-to-use tools and is easily adaptable for the assessment of custom ROS 2 computational graphs. Drawing from the knowledge of leading robot architects and system architecture experts, RobotPerf establishes a standardized approach to robotics benchmarking. As an open-source initiative, RobotPerf remains committed to evolving with community input to advance the future of hardware-accelerated robotics.
ExploitFlow, cyber security exploitation routes for Game Theory and AI research in robotics
Aug 04, 2023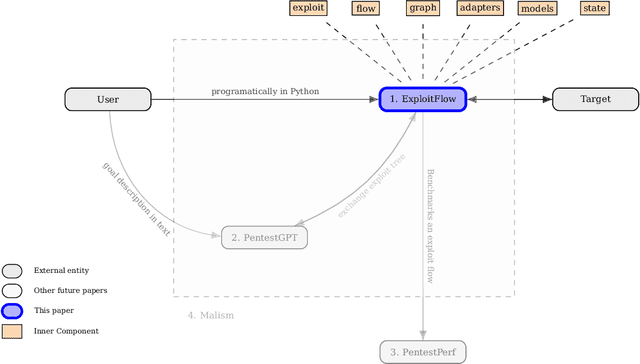
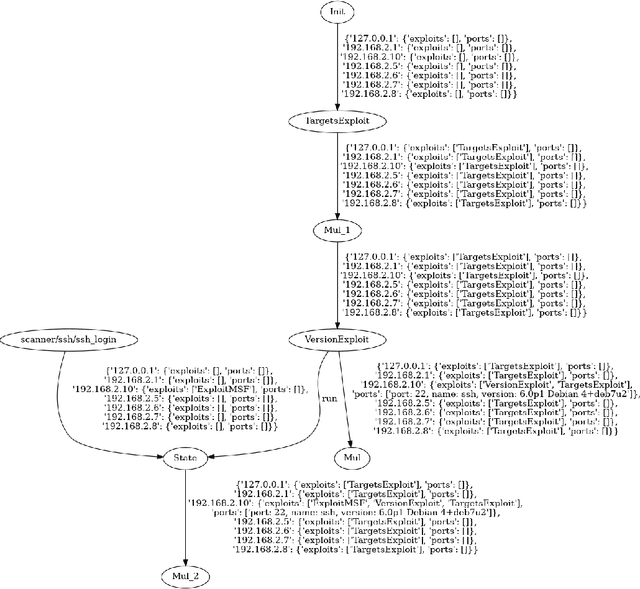
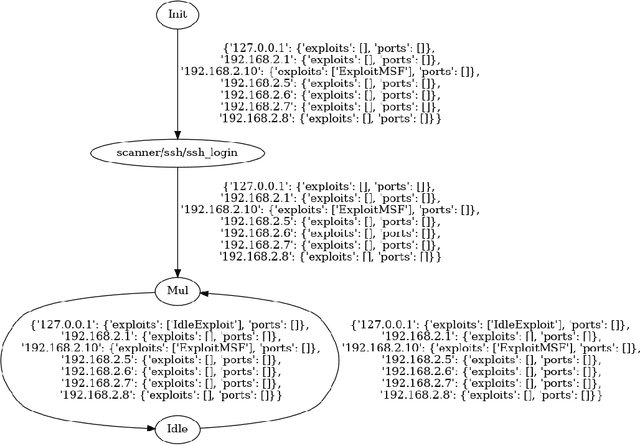
This paper addresses the prevalent lack of tools to facilitate and empower Game Theory and Artificial Intelligence (AI) research in cybersecurity. The primary contribution is the introduction of ExploitFlow (EF), an AI and Game Theory-driven modular library designed for cyber security exploitation. EF aims to automate attacks, combining exploits from various sources, and capturing system states post-action to reason about them and understand potential attack trees. The motivation behind EF is to bolster Game Theory and AI research in cybersecurity, with robotics as the initial focus. Results indicate that EF is effective for exploring machine learning in robot cybersecurity. An artificial agent powered by EF, using Reinforcement Learning, outperformed both brute-force and human expert approaches, laying the path for using ExploitFlow for further research. Nonetheless, we identified several limitations in EF-driven agents, including a propensity to overfit, the scarcity and production cost of datasets for generalization, and challenges in interpreting networking states across varied security settings. To leverage the strengths of ExploitFlow while addressing identified shortcomings, we present Malism, our vision for a comprehensive automated penetration testing framework with ExploitFlow at its core.
RobotCore: An Open Architecture for Hardware Acceleration in ROS 2
May 08, 2022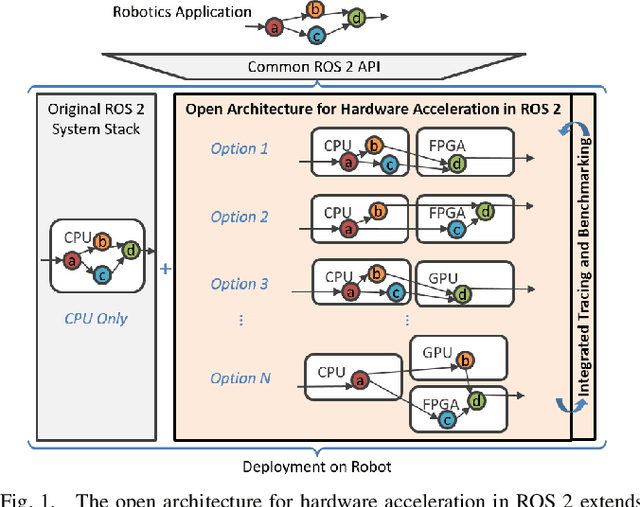
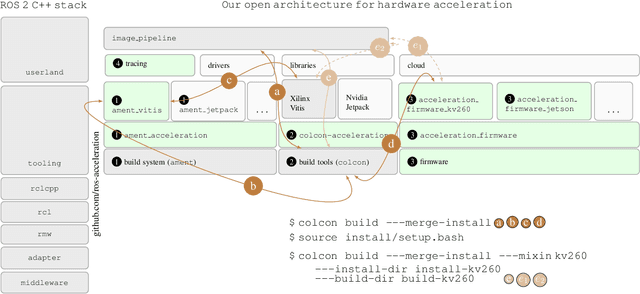
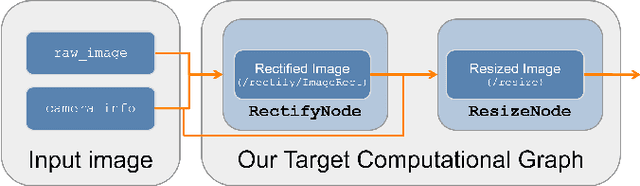
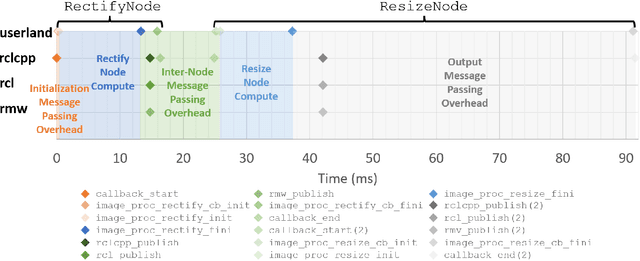
Hardware acceleration can revolutionize robotics, enabling new applications by speeding up robot response times while remaining power-efficient. However, the diversity of acceleration options makes it difficult for roboticists to easily deploy accelerated systems without expertise in each specific hardware platform. In this work, we address this challenge with RobotCore, an architecture to integrate hardware acceleration in the widely-used ROS 2 robotics software framework. This architecture is target-agnostic (supports edge, workstation, data center, or cloud targets) and accelerator-agnostic (supports both FPGAs and GPUs). It builds on top of the common ROS 2 build system and tools and is easily portable across different research and commercial solutions through a new firmware layer. We also leverage the Linux Tracing Toolkit next generation (LTTng) for low-overhead real-time tracing and benchmarking. To demonstrate the acceleration enabled by this architecture, we use it to deploy a ROS 2 perception computational graph on a CPU and FPGA. We employ our integrated tracing and benchmarking to analyze bottlenecks, uncovering insights that guide us to improve FPGA communication efficiency. In particular, we design an intra-FPGA ROS 2 node communication queue to enable faster data flows, and use it in conjunction with FPGA-accelerated nodes to achieve a 24.42% speedup over a CPU.
Adaptive Computing in Robotics, Leveraging ROS 2 to Enable Software-Defined Hardware for FPGAs
Aug 30, 2021
Traditional software development in robotics is about programming functionality in the CPU of a given robot with a pre-defined architecture and constraints. With adaptive computing, instead, building a robotic behavior is about programming an architecture. By leveraging adaptive computing, roboticists can adapt one or more of the properties of its computing systems (e.g. its determinism, power consumption, security posture, or throughput) at run time. Roboticists are not, however, hardware engineers, and embedded expertise is scarce among them. This white paper adopts a ROS 2 roboticist-centric view for adaptive computing and proposes an architecture to include FPGAs as a first-class participant of the ROS 2 ecosystem. The architecture proposed is platform- and technology-agnostic, and is easily portable. The core components of the architecture are disclosed under an Apache 2.0 license, paving the way for roboticists to leverage adaptive computing and create software-defined hardware.
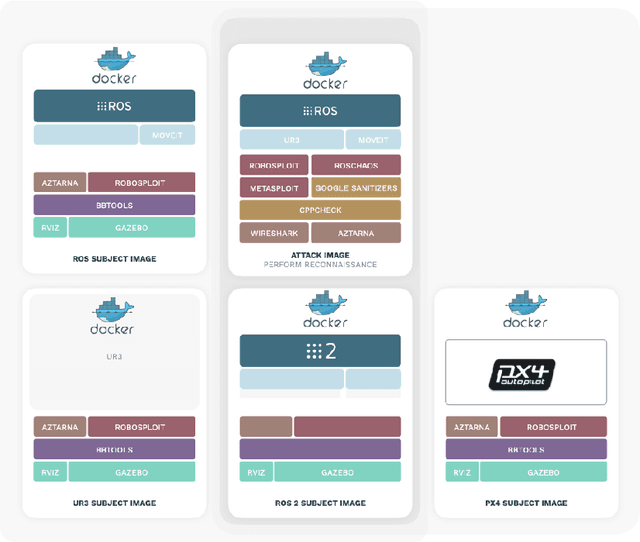
alurity, a toolbox for robot cybersecurity
Oct 16, 2020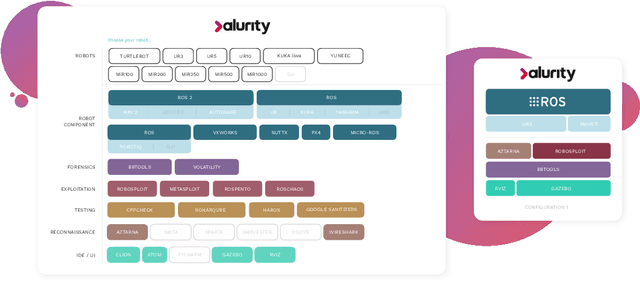
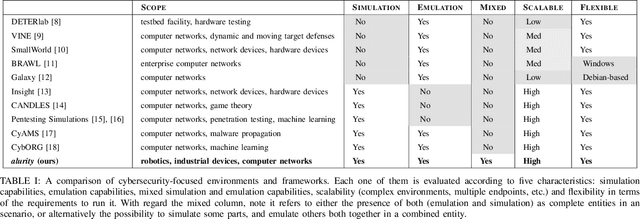
The reuse of technologies and inherent complexity of most robotic systems is increasingly leading to robots with wide attack surfaces and a variety of potential vulnerabilities. Given their growing presence in public environments, security research is increasingly becoming more important than in any other area, specially due to the safety implications that robot vulnerabilities could cause on humans. We argue that security triage in robotics is still immature and that new tools must be developed to accelerate the testing-triage-exploitation cycle, necessary for prioritizing and accelerating the mitigation of flaws. The present work tackles the current lack of offensive cybersecurity research in robotics by presenting a toolbox and the results obtained with it through several use cases conducted over a year period. We propose a modular and composable toolbox for robot cybersecurity: alurity. By ensuring that both roboticists and security researchers working on a project have a common, consistent and easily reproducible development environment, alurity aims to facilitate the cybersecurity research and the collaboration across teams.
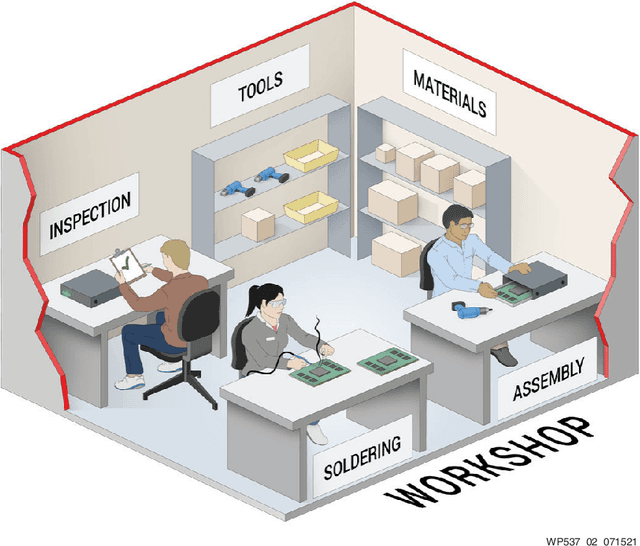
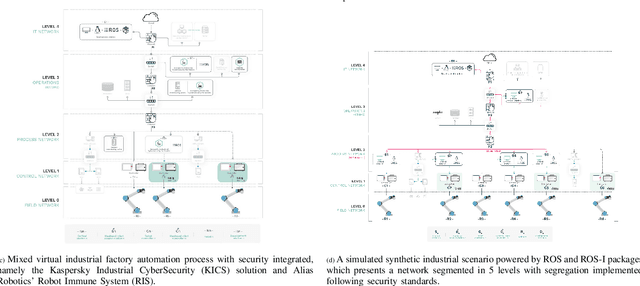
Can ROS be used securely in industry? Red teaming ROS-Industrial
Sep 17, 2020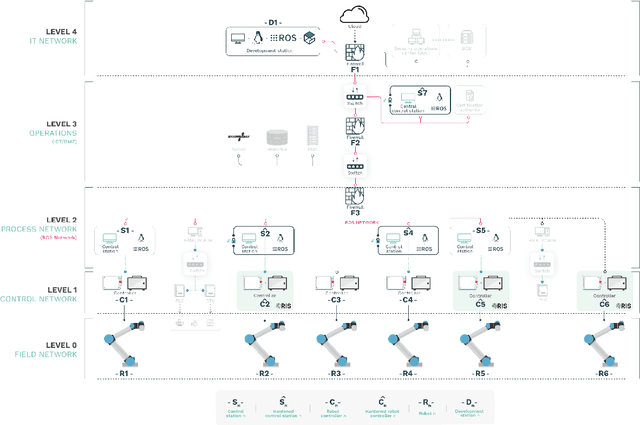
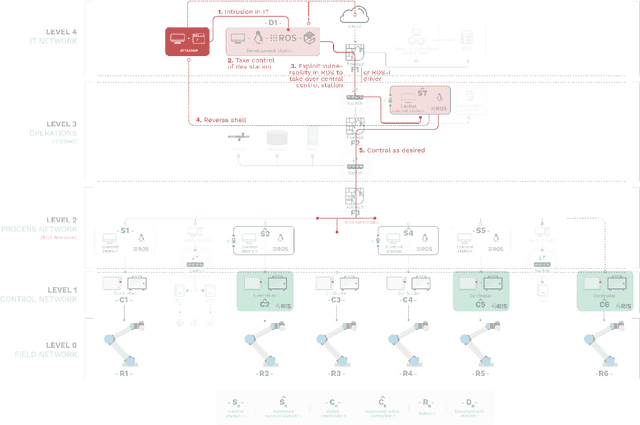
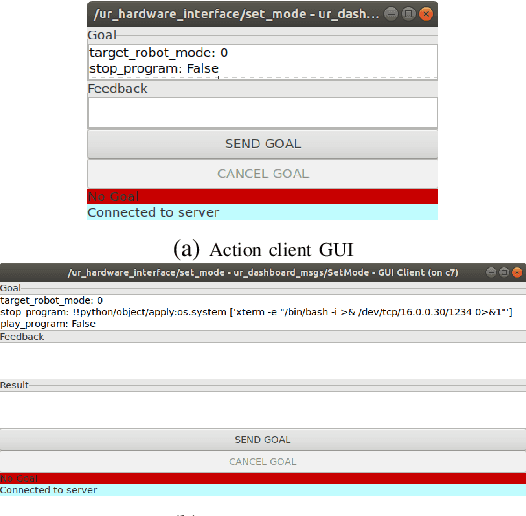
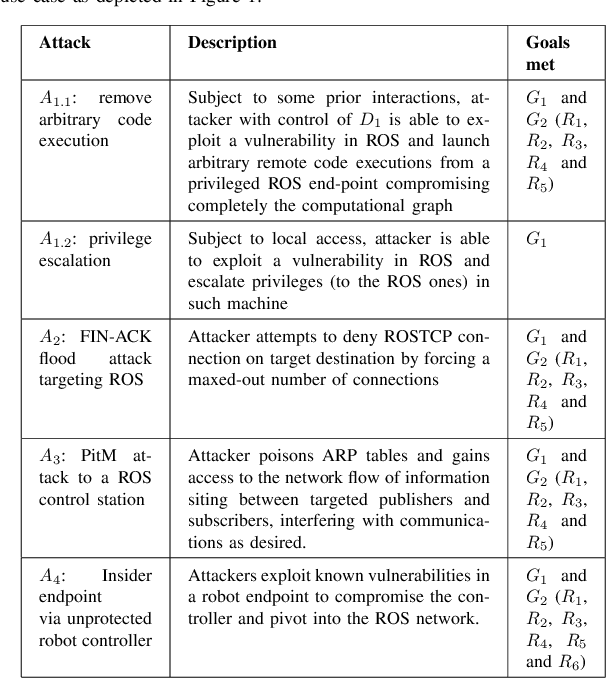
With its growing use in industry, ROS is rapidly becoming a standard in robotics. While developments in ROS 2 show promise, the slow adoption cycles in industry will push widespread ROS 2 industrial adoption years from now. ROS will prevail in the meantime which raises the question: can ROS be used securely for industrial use cases even though its origins didn't consider it? The present study analyzes this question experimentally by performing a targeted offensive security exercise in a synthetic industrial use case involving ROS-Industrial and ROS packages. Our exercise results in four groups of attacks which manage to compromise the ROS computational graph, and all except one take control of most robotic endpoints at desire. To the best of our knowledge and given our setup, results do not favour the secure use of ROS in industry today, however, we managed to confirm that the security of certain robotic endpoints hold and remain optimistic about securing ROS industrial deployments.
DevSecOps in Robotics
Mar 25, 2020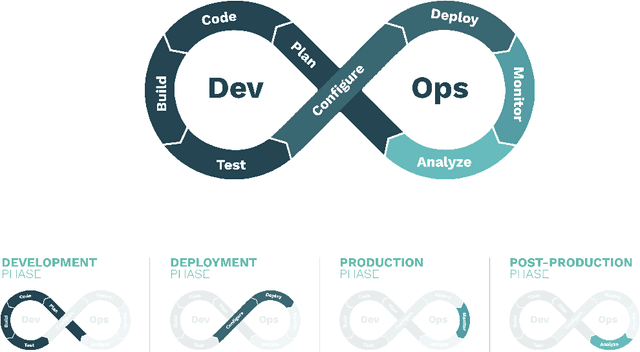
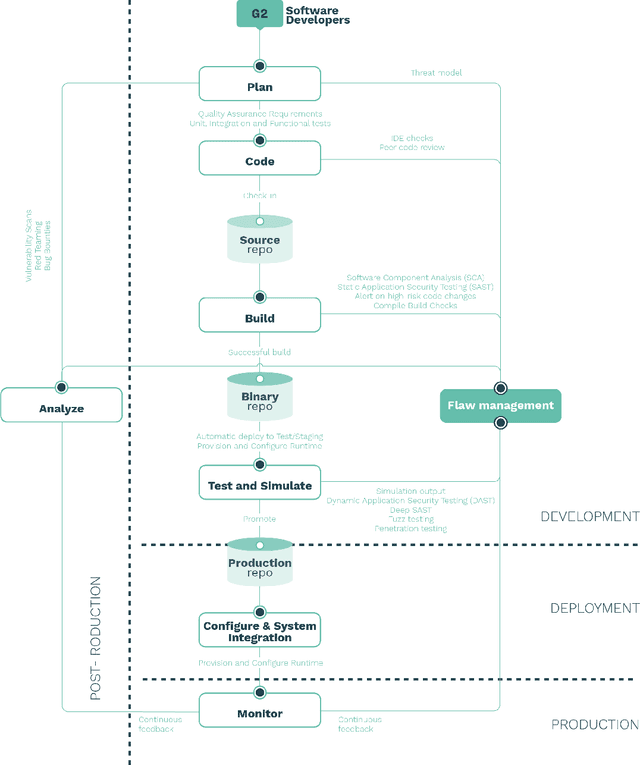
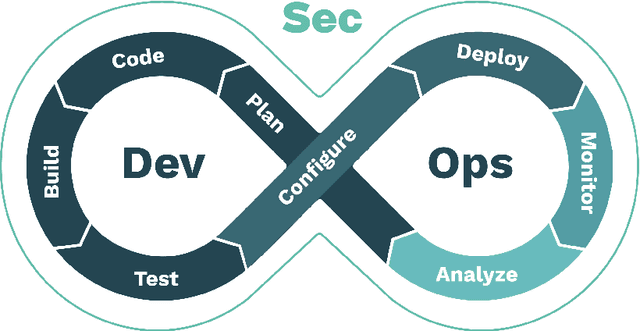
Quality in software is often understood as "execution according to design purpose" whereas security means that "software will not put data or computing systems at risk of unauthorized access." There seems to be a connection between these two aspects but, how do we integrate both of them in the robotics development cycle? In this article we introduce DevSecOps in Robotics, a set of best practices designed to help roboticists implant security deep in the heart of their development and operations processes. First, we briefly describe DevOps, introduce the value added with DevSecOps and describe and illustrate how these practices may be implemented in the robotics field. We finalize with a discussion on the relationship between security, quality and safety, open problems and future research questions.