 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVaPr: Variable-Precision Tensors to Accelerate Robot Motion Planning
Oct 11, 2023



High-dimensional motion generation requires numerical precision for smooth, collision-free solutions. Typically, double-precision or single-precision floating-point (FP) formats are utilized. Using these for big tensors imposes a strain on the memory bandwidth provided by the devices and alters the memory footprint, hence limiting their applicability to low-power edge devices needed for mobile robots. The uniform application of reduced precision can be advantageous but severely degrades solutions. Using decreased precision data types for important tensors, we propose to accelerate motion generation by removing memory bottlenecks. We propose variable-precision (VaPr) search optimization to determine the appropriate precision for large tensors from a vast search space of approximately 4 million unique combinations for FP data types across the tensors. To obtain the efficiency gains, we exploit existing platform support for an out-of-the-box GPU speedup and evaluate prospective precision converter units for GPU types that are not currently supported. Our experimental results on 800 planning problems for the Franka Panda robot on the MotionBenchmaker dataset across 8 environments show that a 4-bit FP format is sufficient for the largest set of tensors in the motion generation stack. With the software-only solution, VaPr achieves 6.3% and 6.3% speedups on average for a significant portion of motion generation over the SOTA solution (CuRobo) on Jetson Orin and RTX2080 Ti GPU, respectively, and 9.9%, 17.7% speedups with the FP converter.
RobotPerf: An Open-Source, Vendor-Agnostic, Benchmarking Suite for Evaluating Robotics Computing System Performance
Sep 17, 2023
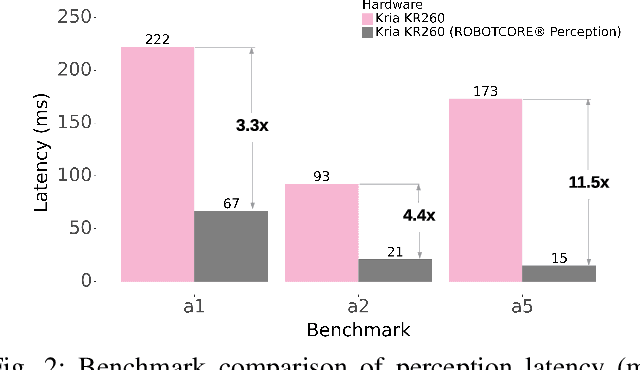

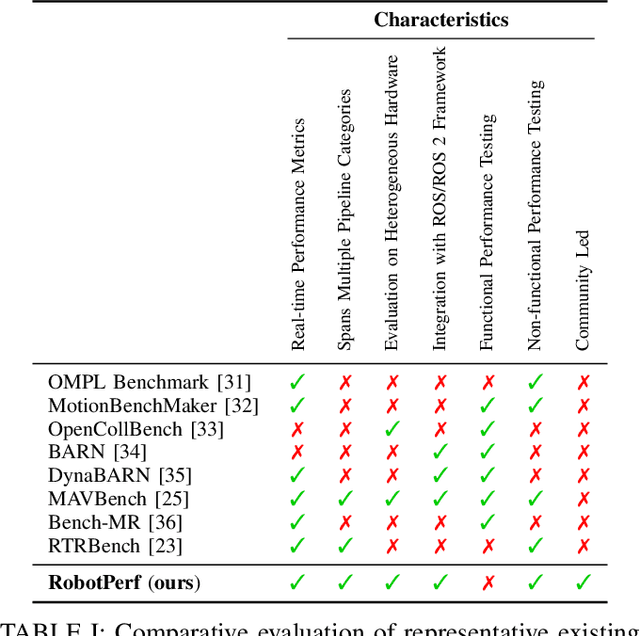
We introduce RobotPerf, a vendor-agnostic benchmarking suite designed to evaluate robotics computing performance across a diverse range of hardware platforms using ROS 2 as its common baseline. The suite encompasses ROS 2 packages covering the full robotics pipeline and integrates two distinct benchmarking approaches: black-box testing, which measures performance by eliminating upper layers and replacing them with a test application, and grey-box testing, an application-specific measure that observes internal system states with minimal interference. Our benchmarking framework provides ready-to-use tools and is easily adaptable for the assessment of custom ROS 2 computational graphs. Drawing from the knowledge of leading robot architects and system architecture experts, RobotPerf establishes a standardized approach to robotics benchmarking. As an open-source initiative, RobotPerf remains committed to evolving with community input to advance the future of hardware-accelerated robotics.
Zhuyi: Perception Processing Rate Estimation for Safety in Autonomous Vehicles
May 06, 2022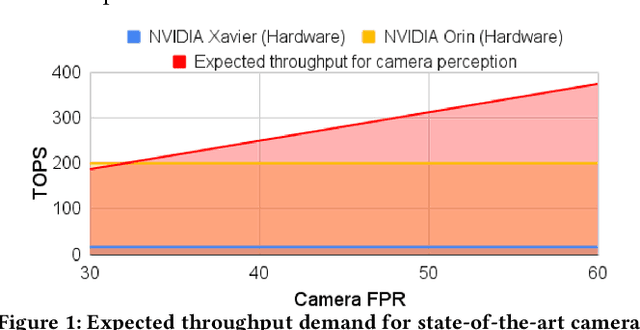
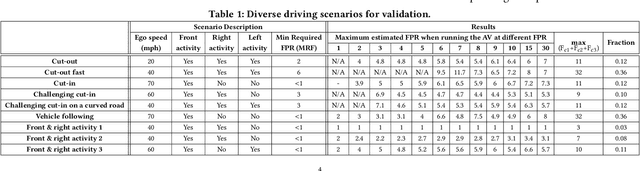
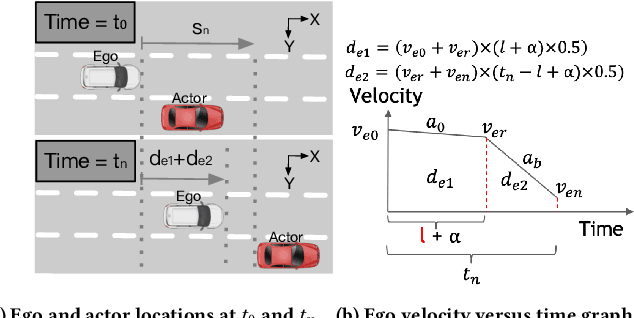
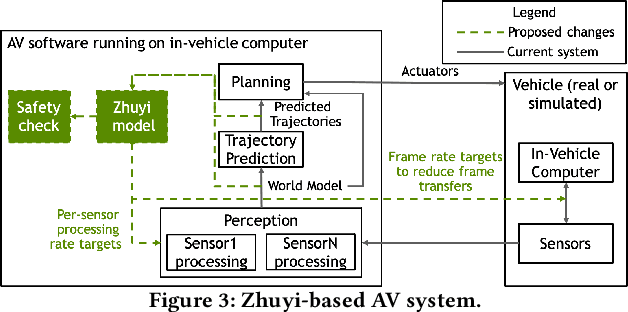
The processing requirement of autonomous vehicles (AVs) for high-accuracy perception in complex scenarios can exceed the resources offered by the in-vehicle computer, degrading safety and comfort. This paper proposes a sensor frame processing rate (FPR) estimation model, Zhuyi, that quantifies the minimum safe FPR continuously in a driving scenario. Zhuyi can be employed post-deployment as an online safety check and to prioritize work. Experiments conducted using a multi-camera state-of-the-art industry AV system show that Zhuyi's estimated FPRs are conservative, yet the system can maintain safety by processing only 36% or fewer frames compared to a default 30-FPR system in the tested scenarios.
OMU: A Probabilistic 3D Occupancy Mapping Accelerator for Real-time OctoMap at the Edge
May 06, 2022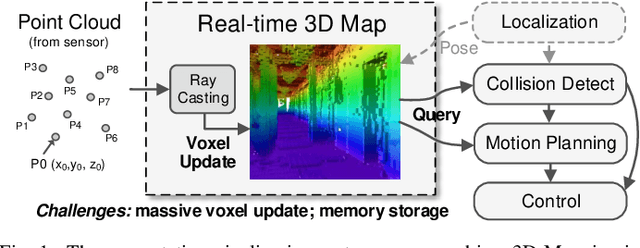
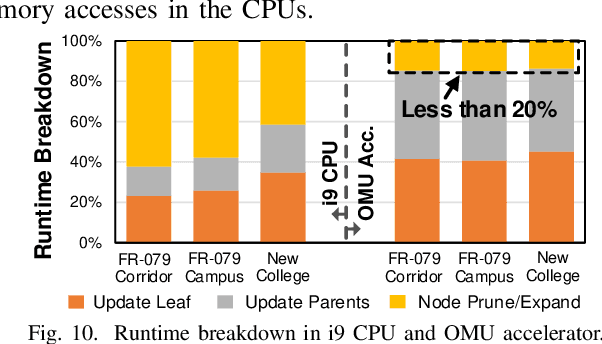
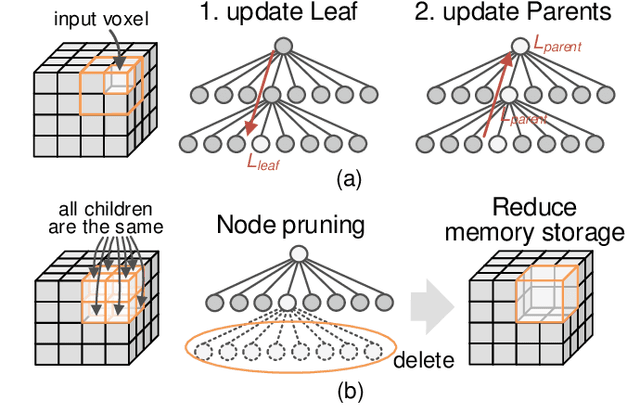
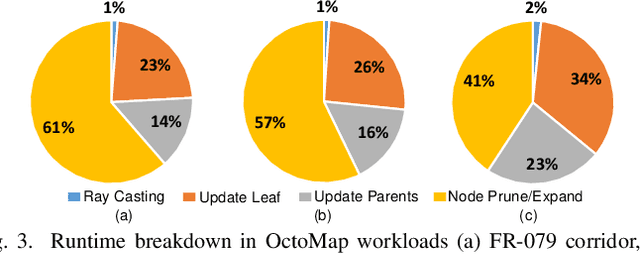
Autonomous machines (e.g., vehicles, mobile robots, drones) require sophisticated 3D mapping to perceive the dynamic environment. However, maintaining a real-time 3D map is expensive both in terms of compute and memory requirements, especially for resource-constrained edge machines. Probabilistic OctoMap is a reliable and memory-efficient 3D dense map model to represent the full environment, with dynamic voxel node pruning and expansion capacity. This paper presents the first efficient accelerator solution, i.e. OMU, to enable real-time probabilistic 3D mapping at the edge. To improve the performance, the input map voxels are updated via parallel PE units for data parallelism. Within each PE, the voxels are stored using a specially developed data structure in parallel memory banks. In addition, a pruning address manager is designed within each PE unit to reuse the pruned memory addresses. The proposed 3D mapping accelerator is implemented and evaluated using a commercial 12 nm technology. Compared to the ARM Cortex-A57 CPU in the Nvidia Jetson TX2 platform, the proposed accelerator achieves up to 62$\times$ performance and 708$\times$ energy efficiency improvement. Furthermore, the accelerator provides 63 FPS throughput, more than 2$\times$ higher than a real-time requirement, enabling real-time perception for 3D mapping.
FRL-FI: Transient Fault Analysis for Federated Reinforcement Learning-Based Navigation Systems
Mar 14, 2022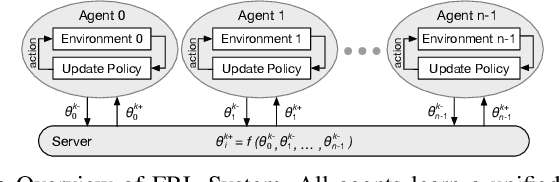
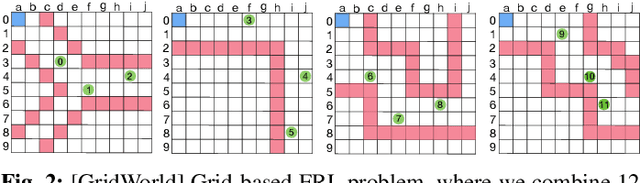
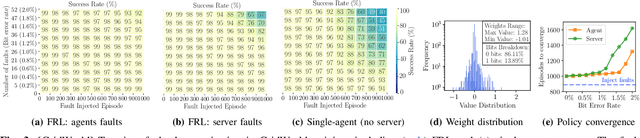
Swarm intelligence is being increasingly deployed in autonomous systems, such as drones and unmanned vehicles. Federated reinforcement learning (FRL), a key swarm intelligence paradigm where agents interact with their own environments and cooperatively learn a consensus policy while preserving privacy, has recently shown potential advantages and gained popularity. However, transient faults are increasing in the hardware system with continuous technology node scaling and can pose threats to FRL systems. Meanwhile, conventional redundancy-based protection methods are challenging to deploy on resource-constrained edge applications. In this paper, we experimentally evaluate the fault tolerance of FRL navigation systems at various scales with respect to fault models, fault locations, learning algorithms, layer types, communication intervals, and data types at both training and inference stages. We further propose two cost-effective fault detection and recovery techniques that can achieve up to 3.3x improvement in resilience with <2.7% overhead in FRL systems.
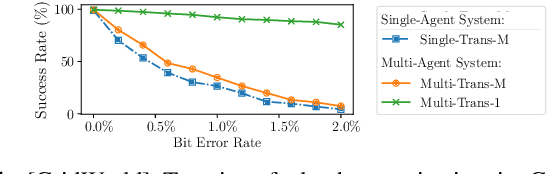
Analyzing and Improving Fault Tolerance of Learning-Based Navigation Systems
Nov 09, 2021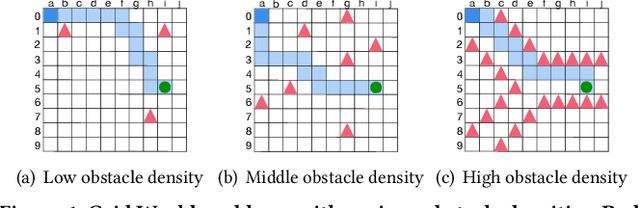
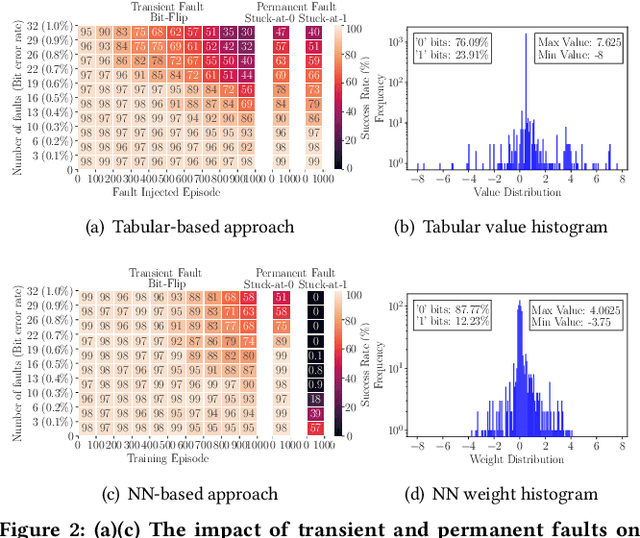
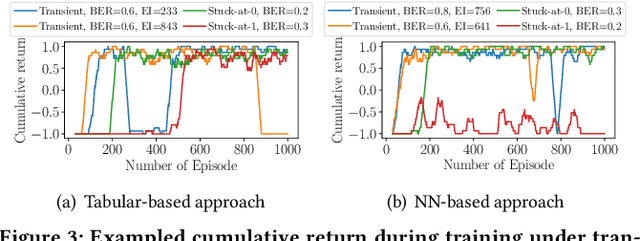
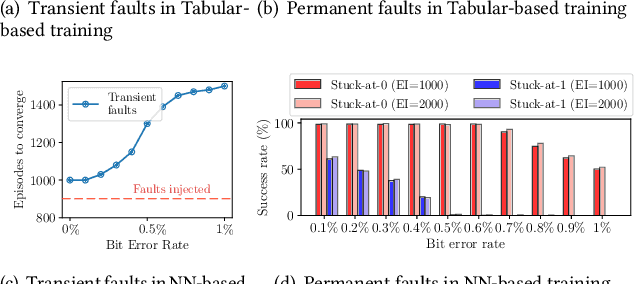
Learning-based navigation systems are widely used in autonomous applications, such as robotics, unmanned vehicles and drones. Specialized hardware accelerators have been proposed for high-performance and energy-efficiency for such navigational tasks. However, transient and permanent faults are increasing in hardware systems and can catastrophically violate tasks safety. Meanwhile, traditional redundancy-based protection methods are challenging to deploy on resource-constrained edge applications. In this paper, we experimentally evaluate the resilience of navigation systems with respect to algorithms, fault models and data types from both RL training and inference. We further propose two efficient fault mitigation techniques that achieve 2x success rate and 39% quality-of-flight improvement in learning-based navigation systems.
MAVFI: An End-to-End Fault Analysis Framework with Anomaly Detection and Recovery for Micro Aerial Vehicles
May 27, 2021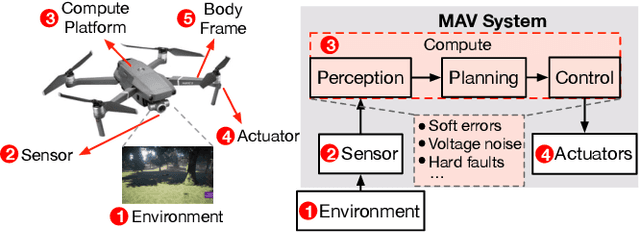

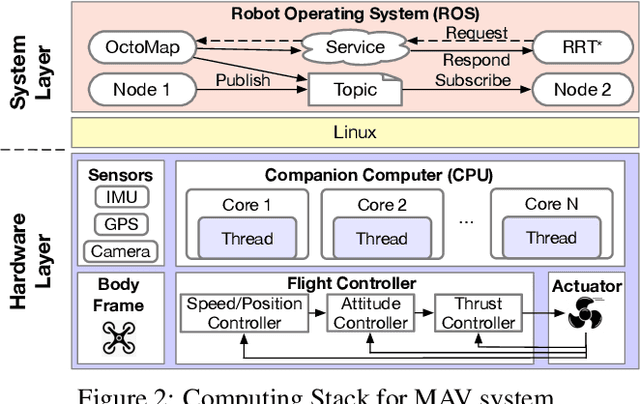
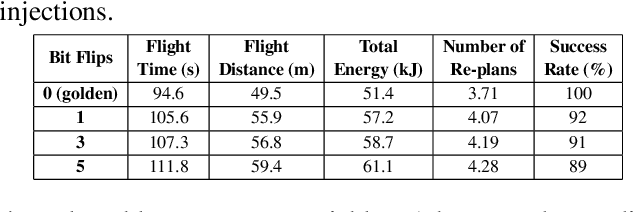
Reliability and safety are critical in autonomous machine services, such as autonomous vehicles and aerial drones. In this paper, we first present an open-source Micro Aerial Vehicles (MAVs) reliability analysis framework, MAVFI, to characterize transient fault's impacts on the end-to-end flight metrics, e.g., flight time, success rate. Based on our framework, it is observed that the end-to-end fault tolerance analysis is essential for characterizing system reliability. We demonstrate the planning and control stages are more vulnerable to transient faults than the visual perception stage in the common "Perception-Planning-Control (PPC)" compute pipeline. Furthermore, to improve the reliability of the MAV system, we propose two low overhead anomaly-based transient fault detection and recovery schemes based on Gaussian statistical models and autoencoder neural networks. We validate our anomaly fault protection schemes with a variety of simulated photo-realistic environments on both Intel i9 CPU and ARM Cortex-A57 on Nvidia TX2 platform. It is demonstrated that the autoencoder-based scheme can improve the system reliability by 100% recovering failure cases with less than 0.0062% computational overhead in best-case scenarios. In addition, MAVFI framework can be used for other ROS-based cyber-physical applications and is open-sourced at https://github.com/harvard-edge/MAVBench/tree/mavfi