 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuaranteed Guess: A Language Modeling Approach for CISC-to-RISC Transpilation with Testing Guarantees
Jun 17, 2025



The hardware ecosystem is rapidly evolving, with increasing interest in translating low-level programs across different instruction set architectures (ISAs) in a quick, flexible, and correct way to enhance the portability and longevity of existing code. A particularly challenging class of this transpilation problem is translating between complex- (CISC) and reduced- (RISC) hardware architectures, due to fundamental differences in instruction complexity, memory models, and execution paradigms. In this work, we introduce GG (Guaranteed Guess), an ISA-centric transpilation pipeline that combines the translation power of pre-trained large language models (LLMs) with the rigor of established software testing constructs. Our method generates candidate translations using an LLM from one ISA to another, and embeds such translations within a software-testing framework to build quantifiable confidence in the translation. We evaluate our GG approach over two diverse datasets, enforce high code coverage (>98%) across unit tests, and achieve functional/semantic correctness of 99% on HumanEval programs and 49% on BringupBench programs, respectively. Further, we compare our approach to the state-of-the-art Rosetta 2 framework on Apple Silicon, showcasing 1.73x faster runtime performance, 1.47x better energy efficiency, and 2.41x better memory usage for our transpiled code, demonstrating the effectiveness of GG for real-world CISC-to-RISC translation tasks. We will open-source our codes, data, models, and benchmarks to establish a common foundation for ISA-level code translation research.
CASS: Nvidia to AMD Transpilation with Data, Models, and Benchmark
May 22, 2025



We introduce \texttt{CASS}, the first large-scale dataset and model suite for cross-architecture GPU code transpilation, targeting both source-level (CUDA~$\leftrightarrow$~HIP) and assembly-level (Nvidia SASS~$\leftrightarrow$~AMD RDNA3) translation. The dataset comprises 70k verified code pairs across host and device, addressing a critical gap in low-level GPU code portability. Leveraging this resource, we train the \texttt{CASS} family of domain-specific language models, achieving 95\% source translation accuracy and 37.5\% assembly translation accuracy, substantially outperforming commercial baselines such as GPT-4o, Claude, and Hipify. Our generated code matches native performance in over 85\% of test cases, preserving runtime and memory behavior. To support rigorous evaluation, we introduce \texttt{CASS-Bench}, a curated benchmark spanning 16 GPU domains with ground-truth execution. All data, models, and evaluation tools are released as open source to foster progress in GPU compiler tooling, binary compatibility, and LLM-guided hardware translation. Dataset and benchmark are on \href{https://huggingface.co/datasets/MBZUAI/cass}{\textcolor{blue}{HuggingFace}}, with code at \href{https://github.com/GustavoStahl/CASS}{\textcolor{blue}{GitHub}}.
Hardware Resilience Properties of Text-Guided Image Classifiers
Dec 05, 2023


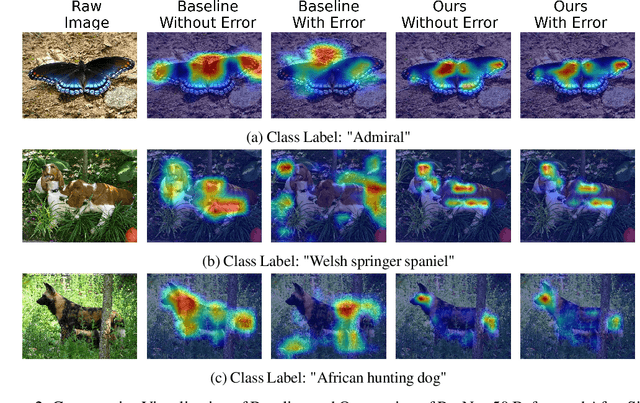
This paper presents a novel method to enhance the reliability of image classification models during deployment in the face of transient hardware errors. By utilizing enriched text embeddings derived from GPT-3 with question prompts per class and CLIP pretrained text encoder, we investigate their impact as an initialization for the classification layer. Our approach achieves a remarkable $5.5\times$ average increase in hardware reliability (and up to $14\times$) across various architectures in the most critical layer, with minimal accuracy drop ($0.3\%$ on average) compared to baseline PyTorch models. Furthermore, our method seamlessly integrates with any image classification backbone, showcases results across various network architectures, decreases parameter and FLOPs overhead, and follows a consistent training recipe. This research offers a practical and efficient solution to bolster the robustness of image classification models against hardware failures, with potential implications for future studies in this domain. Our code and models are released at https://github.com/TalalWasim/TextGuidedResilience.
Guess & Sketch: Language Model Guided Transpilation
Sep 25, 2023



Maintaining legacy software requires many software and systems engineering hours. Assembly code programs, which demand low-level control over the computer machine state and have no variable names, are particularly difficult for humans to analyze. Existing conventional program translators guarantee correctness, but are hand-engineered for the source and target programming languages in question. Learned transpilation, i.e. automatic translation of code, offers an alternative to manual re-writing and engineering efforts. Automated symbolic program translation approaches guarantee correctness but struggle to scale to longer programs due to the exponentially large search space. Their rigid rule-based systems also limit their expressivity, so they can only reason about a reduced space of programs. Probabilistic neural language models (LMs) produce plausible outputs for every input, but do so at the cost of guaranteed correctness. In this work, we leverage the strengths of LMs and symbolic solvers in a neurosymbolic approach to learned transpilation for assembly code. Assembly code is an appropriate setting for a neurosymbolic approach, since assembly code can be divided into shorter non-branching basic blocks amenable to the use of symbolic methods. Guess & Sketch extracts alignment and confidence information from features of the LM then passes it to a symbolic solver to resolve semantic equivalence of the transpilation input and output. We test Guess & Sketch on three different test sets of assembly transpilation tasks, varying in difficulty, and show that it successfully transpiles 57.6% more examples than GPT-4 and 39.6% more examples than an engineered transpiler. We also share a training and evaluation dataset for this task.
FRL-FI: Transient Fault Analysis for Federated Reinforcement Learning-Based Navigation Systems
Mar 14, 2022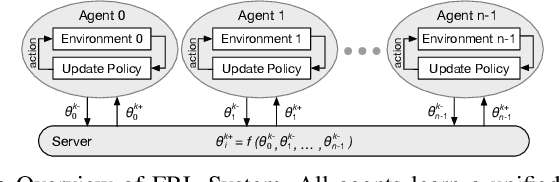
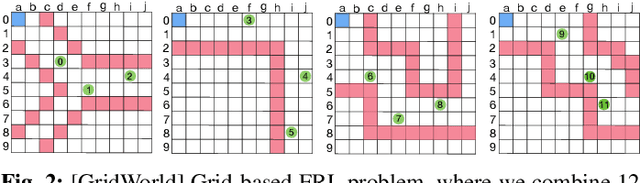
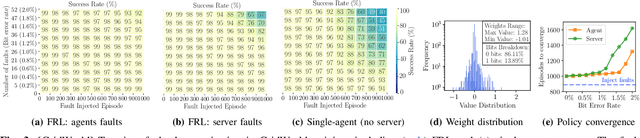
Swarm intelligence is being increasingly deployed in autonomous systems, such as drones and unmanned vehicles. Federated reinforcement learning (FRL), a key swarm intelligence paradigm where agents interact with their own environments and cooperatively learn a consensus policy while preserving privacy, has recently shown potential advantages and gained popularity. However, transient faults are increasing in the hardware system with continuous technology node scaling and can pose threats to FRL systems. Meanwhile, conventional redundancy-based protection methods are challenging to deploy on resource-constrained edge applications. In this paper, we experimentally evaluate the fault tolerance of FRL navigation systems at various scales with respect to fault models, fault locations, learning algorithms, layer types, communication intervals, and data types at both training and inference stages. We further propose two cost-effective fault detection and recovery techniques that can achieve up to 3.3x improvement in resilience with <2.7% overhead in FRL systems.
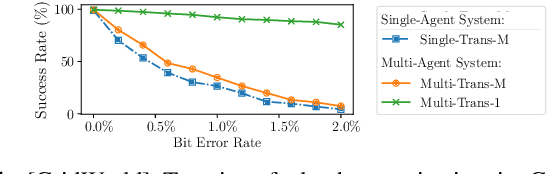
HarDNN: Feature Map Vulnerability Evaluation in CNNs
Feb 25, 2020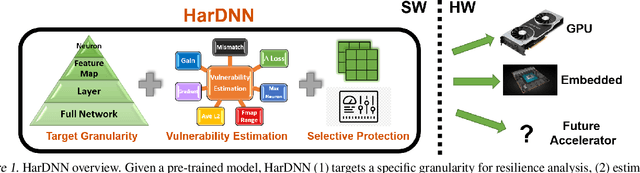
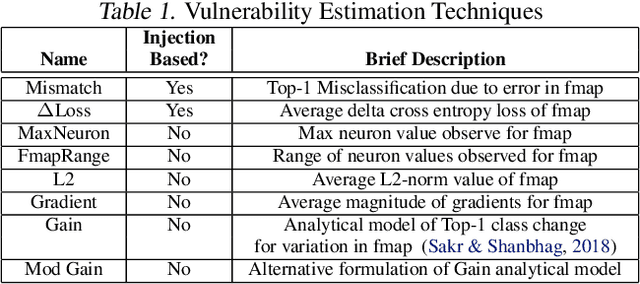
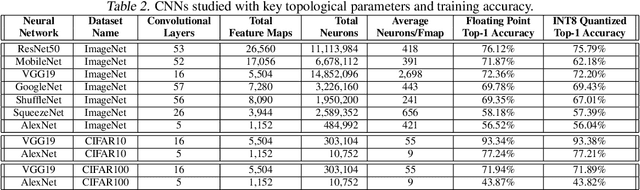
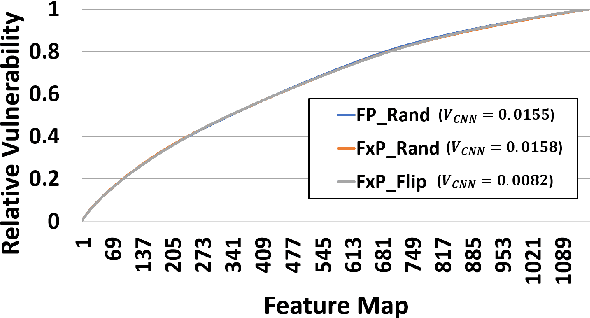
As Convolutional Neural Networks (CNNs) are increasingly being employed in safety-critical applications, it is important that they behave reliably in the face of hardware errors. Transient hardware errors may percolate undesirable state during execution, resulting in software-manifested errors which can adversely affect high-level decision making. This paper presents HarDNN, a software-directed approach to identify vulnerable computations during a CNN inference and selectively protect them based on their propensity towards corrupting the inference output in the presence of a hardware error. We show that HarDNN can accurately estimate relative vulnerability of a feature map (fmap) in CNNs using a statistical error injection campaign, and explore heuristics for fast vulnerability assessment. Based on these results, we analyze the tradeoff between error coverage and computational overhead that the system designers can use to employ selective protection. Results show that the improvement in resilience for the added computation is superlinear with HarDNN. For example, HarDNN improves SqueezeNet's resilience by 10x with just 30% additional computations.