 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZhuyi: Perception Processing Rate Estimation for Safety in Autonomous Vehicles
May 06, 2022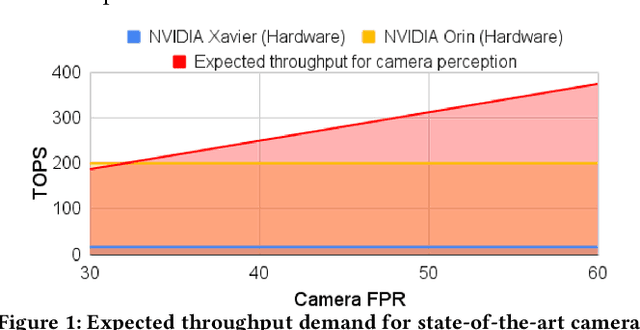
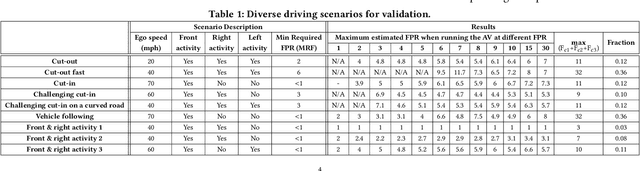
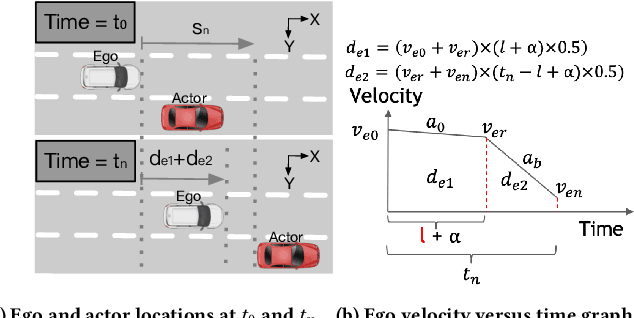
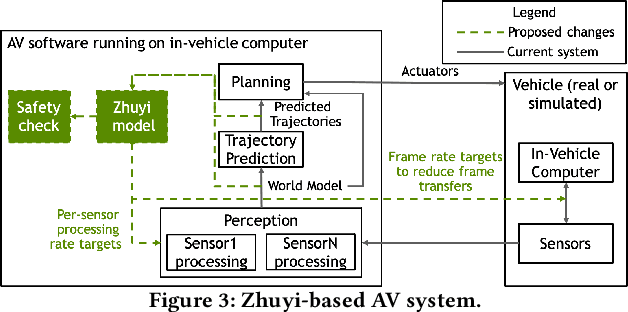
The processing requirement of autonomous vehicles (AVs) for high-accuracy perception in complex scenarios can exceed the resources offered by the in-vehicle computer, degrading safety and comfort. This paper proposes a sensor frame processing rate (FPR) estimation model, Zhuyi, that quantifies the minimum safe FPR continuously in a driving scenario. Zhuyi can be employed post-deployment as an online safety check and to prioritize work. Experiments conducted using a multi-camera state-of-the-art industry AV system show that Zhuyi's estimated FPRs are conservative, yet the system can maintain safety by processing only 36% or fewer frames compared to a default 30-FPR system in the tested scenarios.
Generating and Characterizing Scenarios for Safety Testing of Autonomous Vehicles
Mar 12, 2021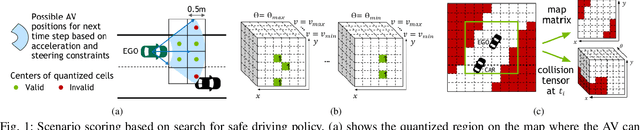
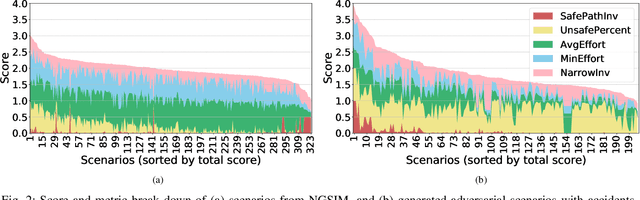
Extracting interesting scenarios from real-world data as well as generating failure cases is important for the development and testing of autonomous systems. We propose efficient mechanisms to both characterize and generate testing scenarios using a state-of-the-art driving simulator. For any scenario, our method generates a set of possible driving paths and identifies all the possible safe driving trajectories that can be taken starting at different times, to compute metrics that quantify the complexity of the scenario. We use our method to characterize real driving data from the Next Generation Simulation (NGSIM) project, as well as adversarial scenarios generated in simulation. We rank the scenarios by defining metrics based on the complexity of avoiding accidents and provide insights into how the AV could have minimized the probability of incurring an accident. We demonstrate a strong correlation between the proposed metrics and human intuition.
Making Convolutions Resilient via Algorithm-Based Error Detection Techniques
Jun 08, 2020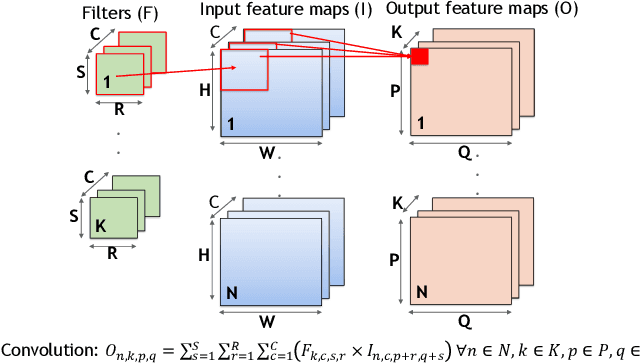
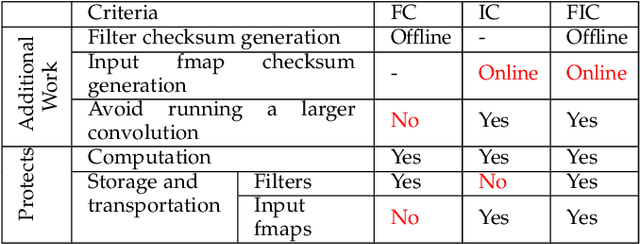
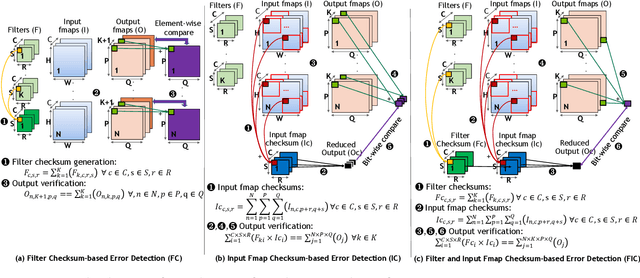
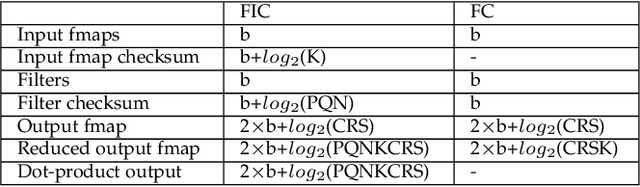
The ability of Convolutional Neural Networks (CNNs) to accurately process real-time telemetry has boosted their use in safety-critical and high-performance computing systems. As such systems require high levels of resilience to errors, CNNs must execute correctly in the presence of hardware faults. Full duplication provides the needed assurance but incurs a prohibitive 100% overhead. Algorithmic techniques are known to offer low-cost solutions, but the practical feasibility and performance of such techniques have never been studied for CNN deployment platforms (e.g., TensorFlow or TensorRT on GPUs). In this paper, we focus on algorithmically verifying Convolutions, which are the most resource-demanding operations in CNNs. We use checksums to verify convolutions, adding a small amount of redundancy, far less than full-duplication. We first identify the challenges that arise in employing Algorithm-Based Error Detection (ABED) for Convolutions in optimized inference platforms that fuse multiple network layers and use reduced-precision operations, and demonstrate how to overcome them. We propose and evaluate variations of ABED techniques that offer implementation complexity, runtime overhead, and coverage trade-offs. Results show that ABED can detect all transient hardware errors that might otherwise corrupt output and does so while incurring low runtime overheads (6-23%), offering at least 1.6X throughput to workloads compared to full duplication.
ML-driven Malware that Targets AV Safety
Apr 24, 2020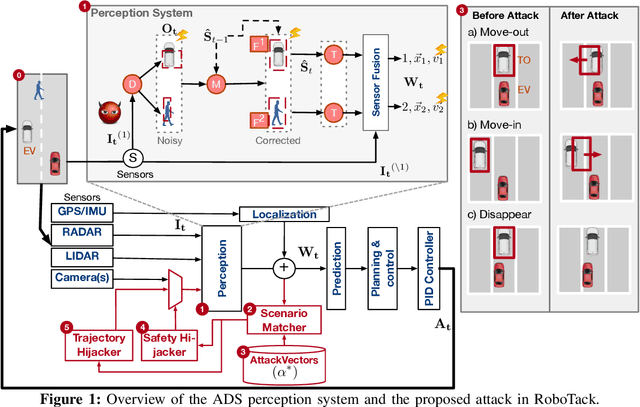
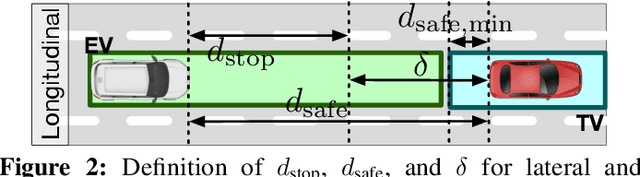
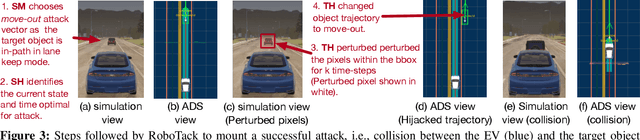

Ensuring the safety of autonomous vehicles (AVs) is critical for their mass deployment and public adoption. However, security attacks that violate safety constraints and cause accidents are a significant deterrent to achieving public trust in AVs, and that hinders a vendor's ability to deploy AVs. Creating a security hazard that results in a severe safety compromise (for example, an accident) is compelling from an attacker's perspective. In this paper, we introduce an attack model, a method to deploy the attack in the form of smart malware, and an experimental evaluation of its impact on production-grade autonomous driving software. We find that determining the time interval during which to launch the attack is{ critically} important for causing safety hazards (such as collisions) with a high degree of success. For example, the smart malware caused 33X more forced emergency braking than random attacks did, and accidents in 52.6% of the driving simulations.
* Accepted for DSN 2020
HarDNN: Feature Map Vulnerability Evaluation in CNNs
Feb 25, 2020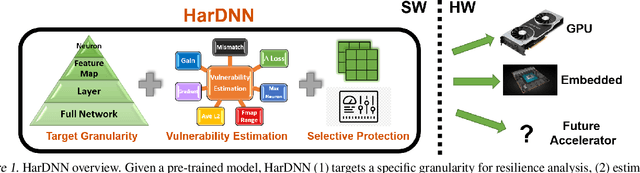
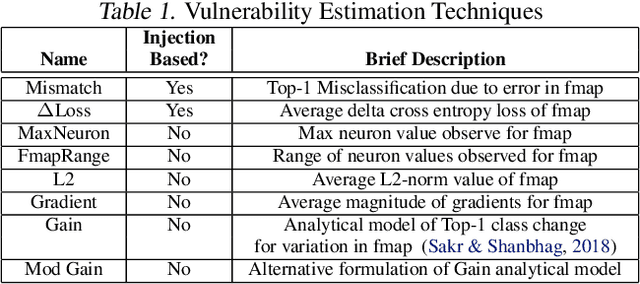
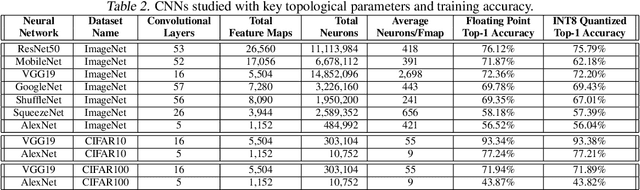
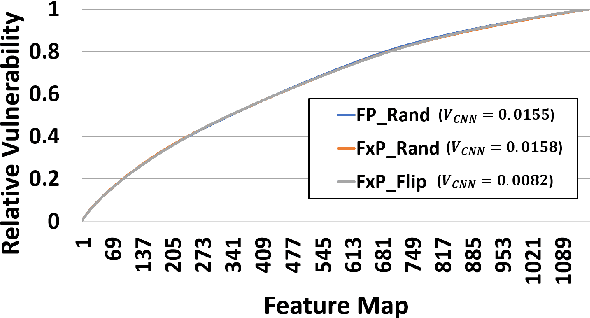
As Convolutional Neural Networks (CNNs) are increasingly being employed in safety-critical applications, it is important that they behave reliably in the face of hardware errors. Transient hardware errors may percolate undesirable state during execution, resulting in software-manifested errors which can adversely affect high-level decision making. This paper presents HarDNN, a software-directed approach to identify vulnerable computations during a CNN inference and selectively protect them based on their propensity towards corrupting the inference output in the presence of a hardware error. We show that HarDNN can accurately estimate relative vulnerability of a feature map (fmap) in CNNs using a statistical error injection campaign, and explore heuristics for fast vulnerability assessment. Based on these results, we analyze the tradeoff between error coverage and computational overhead that the system designers can use to employ selective protection. Results show that the improvement in resilience for the added computation is superlinear with HarDNN. For example, HarDNN improves SqueezeNet's resilience by 10x with just 30% additional computations.
ML-based Fault Injection for Autonomous Vehicles: A Case for Bayesian Fault Injection
Jul 01, 2019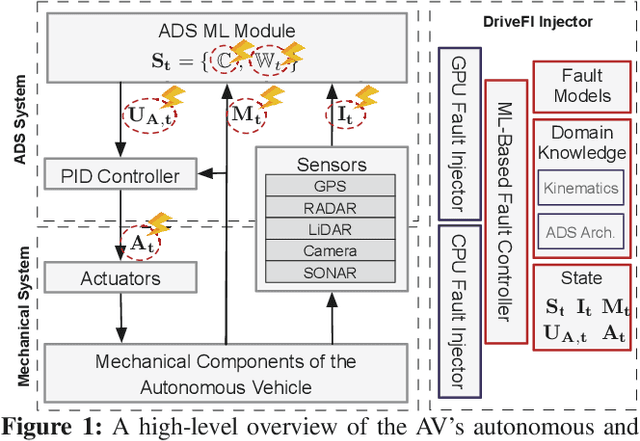
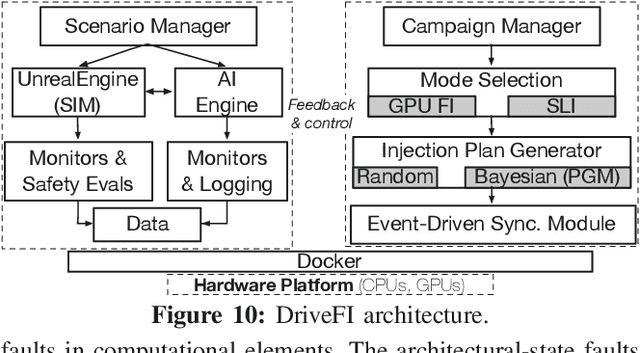
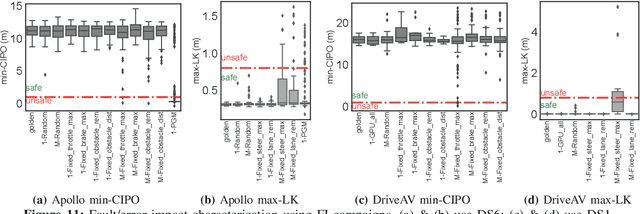
The safety and resilience of fully autonomous vehicles (AVs) are of significant concern, as exemplified by several headline-making accidents. While AV development today involves verification, validation, and testing, end-to-end assessment of AV systems under accidental faults in realistic driving scenarios has been largely unexplored. This paper presents DriveFI, a machine learning-based fault injection engine, which can mine situations and faults that maximally impact AV safety, as demonstrated on two industry-grade AV technology stacks (from NVIDIA and Baidu). For example, DriveFI found 561 safety-critical faults in less than 4 hours. In comparison, random injection experiments executed over several weeks could not find any safety-critical faults