 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHySafe-AI: Hybrid Safety Architectural Analysis Framework for AI Systems: A Case Study
Jul 23, 2025AI has become integral to safety-critical areas like autonomous driving systems (ADS) and robotics. The architecture of recent autonomous systems are trending toward end-to-end (E2E) monolithic architectures such as large language models (LLMs) and vision language models (VLMs). In this paper, we review different architectural solutions and then evaluate the efficacy of common safety analyses such as failure modes and effect analysis (FMEA) and fault tree analysis (FTA). We show how these techniques can be improved for the intricate nature of the foundational models, particularly in how they form and utilize latent representations. We introduce HySAFE-AI, Hybrid Safety Architectural Analysis Framework for AI Systems, a hybrid framework that adapts traditional methods to evaluate the safety of AI systems. Lastly, we offer hints of future work and suggestions to guide the evolution of future AI safety standards.
Zhuyi: Perception Processing Rate Estimation for Safety in Autonomous Vehicles
May 06, 2022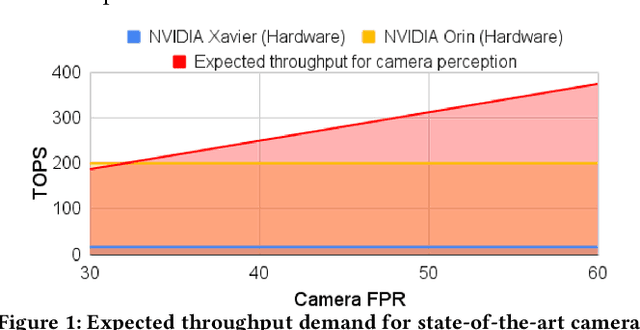
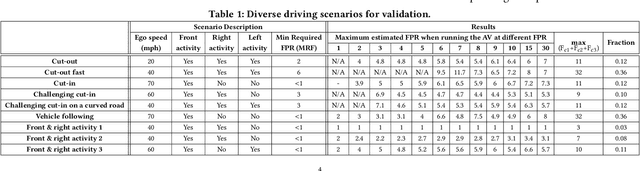
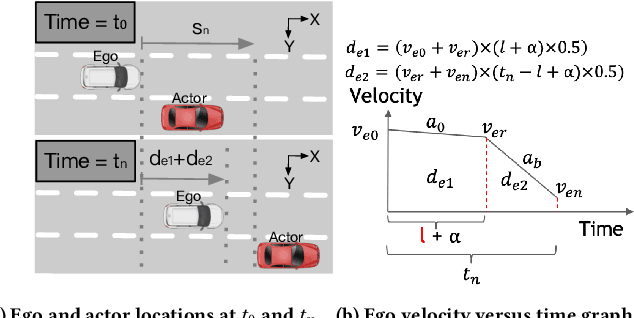
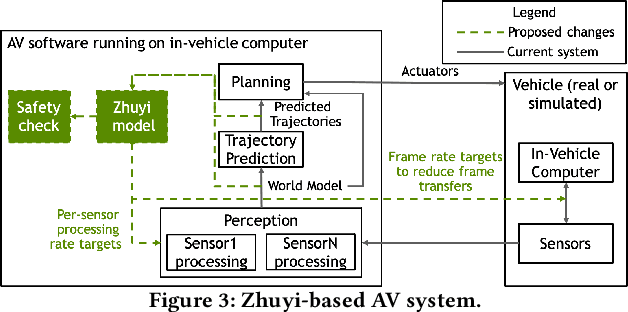
The processing requirement of autonomous vehicles (AVs) for high-accuracy perception in complex scenarios can exceed the resources offered by the in-vehicle computer, degrading safety and comfort. This paper proposes a sensor frame processing rate (FPR) estimation model, Zhuyi, that quantifies the minimum safe FPR continuously in a driving scenario. Zhuyi can be employed post-deployment as an online safety check and to prioritize work. Experiments conducted using a multi-camera state-of-the-art industry AV system show that Zhuyi's estimated FPRs are conservative, yet the system can maintain safety by processing only 36% or fewer frames compared to a default 30-FPR system in the tested scenarios.
Practical Solutions for Machine Learning Safety in Autonomous Vehicles
Dec 20, 2019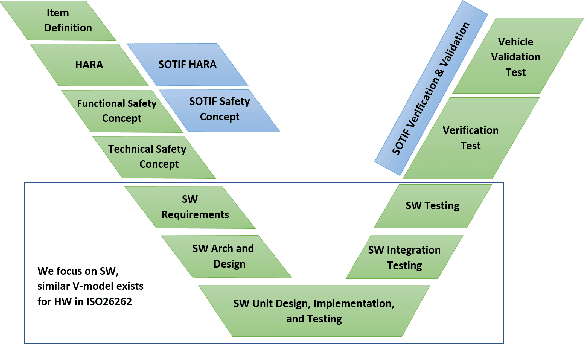
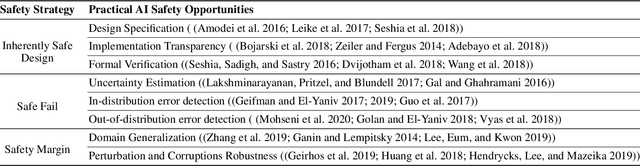
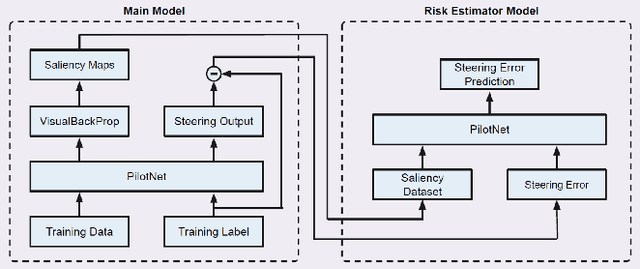
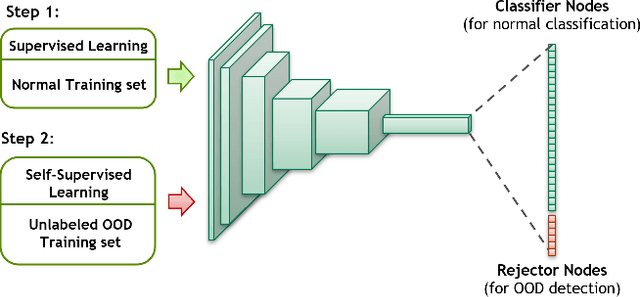
Autonomous vehicles rely on machine learning to solve challenging tasks in perception and motion planning. However, automotive software safety standards have not fully evolved to address the challenges of machine learning safety such as interpretability, verification, and performance limitations. In this paper, we review and organize practical machine learning safety techniques that can complement engineering safety for machine learning based software in autonomous vehicles. Our organization maps safety strategies to state-of-the-art machine learning techniques in order to enhance dependability and safety of machine learning algorithms. We also discuss security limitations and user experience aspects of machine learning components in autonomous vehicles.