 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROS 2 on a Chip, Achieving Brain-Like Speeds and Efficiency in Robotic Networking
Apr 28, 2024The Robot Operating System (ROS) pubsub model played a pivotal role in developing sophisticated robotic applications. However, the complexities and real-time demands of modern robotics necessitate more efficient communication solutions that are deterministic and isochronous. This article introduces a groundbreaking approach: embedding ROS 2 message-passing infrastructure directly onto a specialized hardware chip, significantly enhancing speed and efficiency in robotic communications. Our FPGA prototypes of the chip design can send or receive packages in less than 2.5 microseconds, accelerating networking communications by more than 62x on average and improving energy consumption by more than 500x when compared to traditional ROS 2 software implementations on modern CPUs. Additionally, it dramatically reduces maximum latency in ROS 2 networking communication by more than 30,000x. In situations of peak latency, our design guarantees an isochronous response within 11 microseconds, a stark improvement over the potential hundreds of milliseconds reported by modern CPU systems under similar conditions.
RobotPerf: An Open-Source, Vendor-Agnostic, Benchmarking Suite for Evaluating Robotics Computing System Performance
Sep 17, 2023
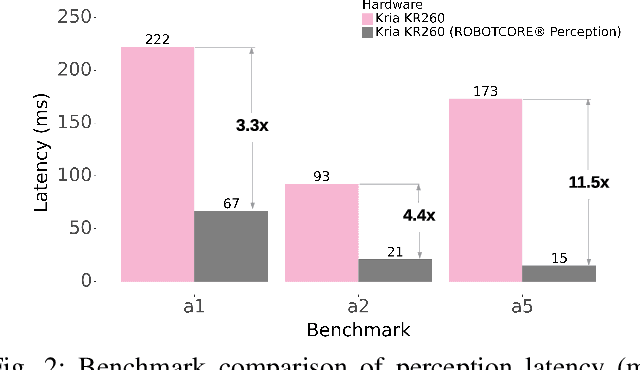

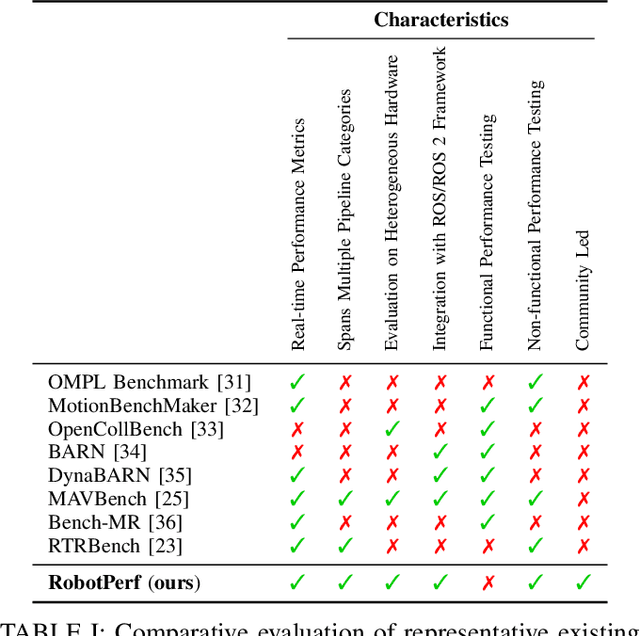
We introduce RobotPerf, a vendor-agnostic benchmarking suite designed to evaluate robotics computing performance across a diverse range of hardware platforms using ROS 2 as its common baseline. The suite encompasses ROS 2 packages covering the full robotics pipeline and integrates two distinct benchmarking approaches: black-box testing, which measures performance by eliminating upper layers and replacing them with a test application, and grey-box testing, an application-specific measure that observes internal system states with minimal interference. Our benchmarking framework provides ready-to-use tools and is easily adaptable for the assessment of custom ROS 2 computational graphs. Drawing from the knowledge of leading robot architects and system architecture experts, RobotPerf establishes a standardized approach to robotics benchmarking. As an open-source initiative, RobotPerf remains committed to evolving with community input to advance the future of hardware-accelerated robotics.