 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA2Perf: Real-World Autonomous Agents Benchmark
Mar 04, 2025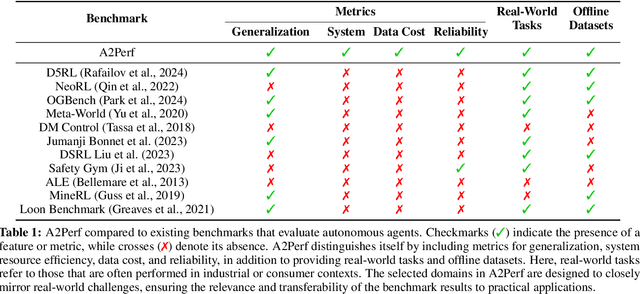
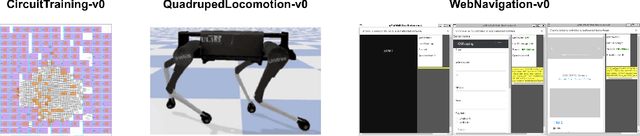
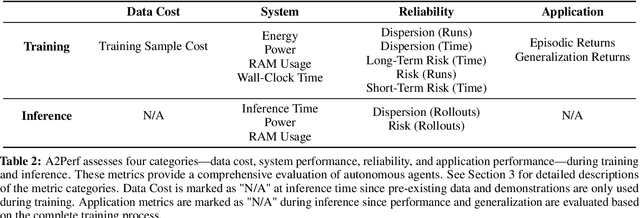
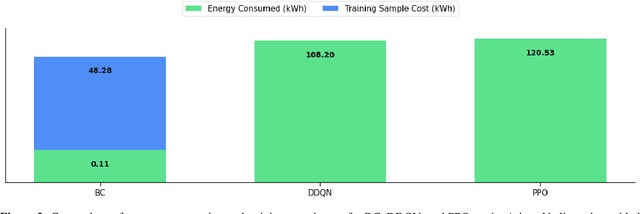
Autonomous agents and systems cover a number of application areas, from robotics and digital assistants to combinatorial optimization, all sharing common, unresolved research challenges. It is not sufficient for agents to merely solve a given task; they must generalize to out-of-distribution tasks, perform reliably, and use hardware resources efficiently during training and inference, among other requirements. Several methods, such as reinforcement learning and imitation learning, are commonly used to tackle these problems, each with different trade-offs. However, there is a lack of benchmarking suites that define the environments, datasets, and metrics which can be used to provide a meaningful way for the community to compare progress on applying these methods to real-world problems. We introduce A2Perf--a benchmark with three environments that closely resemble real-world domains: computer chip floorplanning, web navigation, and quadruped locomotion. A2Perf provides metrics that track task performance, generalization, system resource efficiency, and reliability, which are all critical to real-world applications. Using A2Perf, we demonstrate that web navigation agents can achieve latencies comparable to human reaction times on consumer hardware, reveal reliability trade-offs between algorithms for quadruped locomotion, and quantify the energy costs of different learning approaches for computer chip-design. In addition, we propose a data cost metric to account for the cost incurred acquiring offline data for imitation learning and hybrid algorithms, which allows us to better compare these approaches. A2Perf also contains several standard baselines, enabling apples-to-apples comparisons across methods and facilitating progress in real-world autonomy. As an open-source benchmark, A2Perf is designed to remain accessible, up-to-date, and useful to the research community over the long term.
An Empirical Game-Theoretic Analysis of Autonomous Cyber-Defence Agents
Jan 31, 2025The recent rise in increasingly sophisticated cyber-attacks raises the need for robust and resilient autonomous cyber-defence (ACD) agents. Given the variety of cyber-attack tactics, techniques and procedures (TTPs) employed, learning approaches that can return generalisable policies are desirable. Meanwhile, the assurance of ACD agents remains an open challenge. We address both challenges via an empirical game-theoretic analysis of deep reinforcement learning (DRL) approaches for ACD using the principled double oracle (DO) algorithm. This algorithm relies on adversaries iteratively learning (approximate) best responses against each others' policies; a computationally expensive endeavour for autonomous cyber operations agents. In this work we introduce and evaluate a theoretically-sound, potential-based reward shaping approach to expedite this process. In addition, given the increasing number of open-source ACD-DRL approaches, we extend the DO formulation to allow for multiple response oracles (MRO), providing a framework for a holistic evaluation of ACD approaches.
Machine Theory of Mind for Autonomous Cyber-Defence
Dec 05, 2024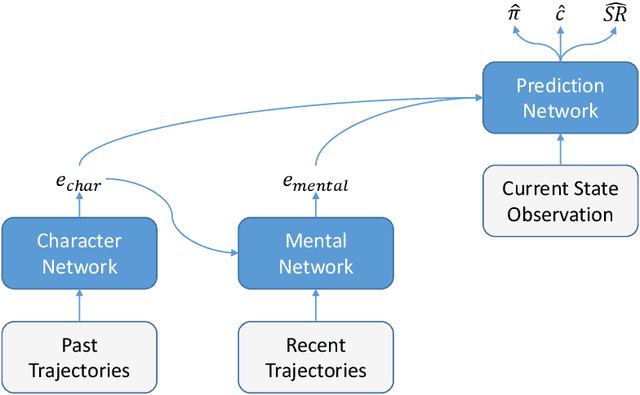
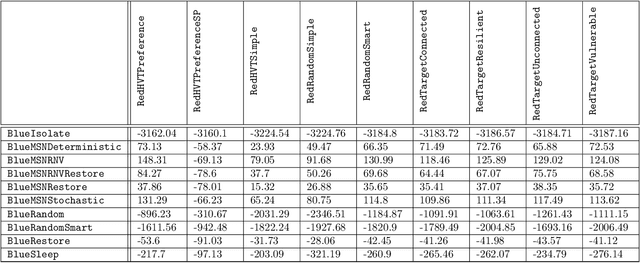
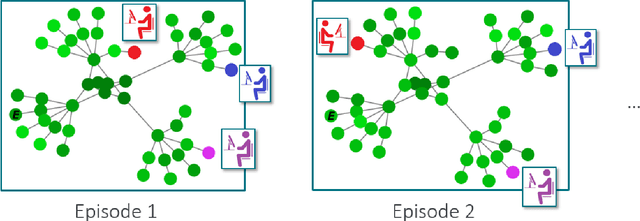
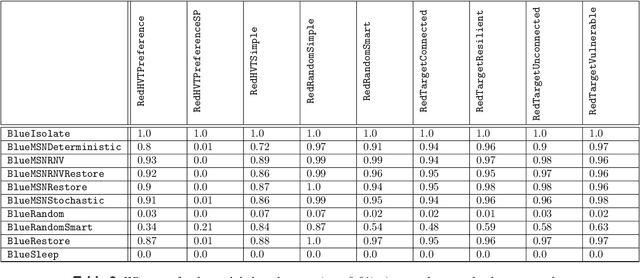
Intelligent autonomous agents hold much potential for the domain of cyber-security. However, due to many state-of-the-art approaches relying on uninterpretable black-box models, there is growing demand for methods that offer stakeholders clear and actionable insights into their latent beliefs and motivations. To address this, we evaluate Theory of Mind (ToM) approaches for Autonomous Cyber Operations. Upon learning a robust prior, ToM models can predict an agent's goals, behaviours, and contextual beliefs given only a handful of past behaviour observations. In this paper, we introduce a novel Graph Neural Network (GNN)-based ToM architecture tailored for cyber-defence, Graph-In, Graph-Out (GIGO)-ToM, which can accurately predict both the targets and attack trajectories of adversarial cyber agents over arbitrary computer network topologies. To evaluate the latter, we propose a novel extension of the Wasserstein distance for measuring the similarity of graph-based probability distributions. Whereas the standard Wasserstein distance lacks a fixed reference scale, we introduce a graph-theoretic normalization factor that enables a standardized comparison between networks of different sizes. We furnish this metric, which we term the Network Transport Distance (NTD), with a weighting function that emphasizes predictions according to custom node features, allowing network operators to explore arbitrary strategic considerations. Benchmarked against a Graph-In, Dense-Out (GIDO)-ToM architecture in an abstract cyber-defence environment, our empirical evaluations show that GIGO-ToM can accurately predict the goals and behaviours of various unseen cyber-attacking agents across a range of network topologies, as well as learn embeddings that can effectively characterize their policies.
Wake Vision: A Large-scale, Diverse Dataset and Benchmark Suite for TinyML Person Detection
May 01, 2024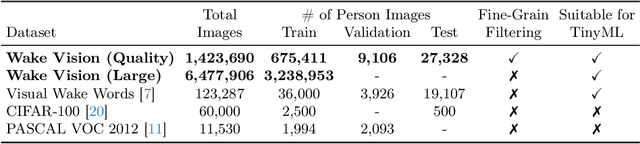
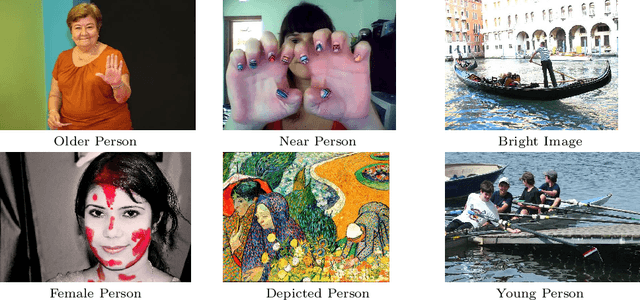
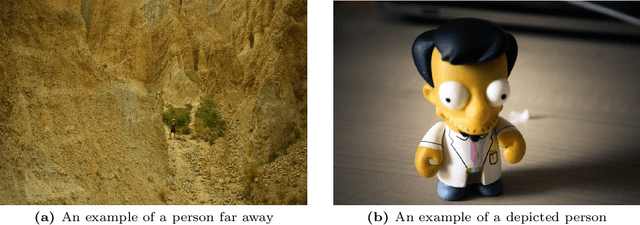

Machine learning applications on extremely low-power devices, commonly referred to as tiny machine learning (TinyML), promises a smarter and more connected world. However, the advancement of current TinyML research is hindered by the limited size and quality of pertinent datasets. To address this challenge, we introduce Wake Vision, a large-scale, diverse dataset tailored for person detection -- the canonical task for TinyML visual sensing. Wake Vision comprises over 6 million images, which is a hundredfold increase compared to the previous standard, and has undergone thorough quality filtering. Using Wake Vision for training results in a 2.41\% increase in accuracy compared to the established benchmark. Alongside the dataset, we provide a collection of five detailed benchmark sets that assess model performance on specific segments of the test data, such as varying lighting conditions, distances from the camera, and demographic characteristics of subjects. These novel fine-grained benchmarks facilitate the evaluation of model quality in challenging real-world scenarios that are often ignored when focusing solely on overall accuracy. Through an evaluation of a MobileNetV2 TinyML model on the benchmarks, we show that the input resolution plays a more crucial role than the model width in detecting distant subjects and that the impact of quantization on model robustness is minimal, thanks to the dataset quality. These findings underscore the importance of a detailed evaluation to identify essential factors for model development. The dataset, benchmark suite, code, and models are publicly available under the CC-BY 4.0 license, enabling their use for commercial use cases.
RobotPerf: An Open-Source, Vendor-Agnostic, Benchmarking Suite for Evaluating Robotics Computing System Performance
Sep 17, 2023
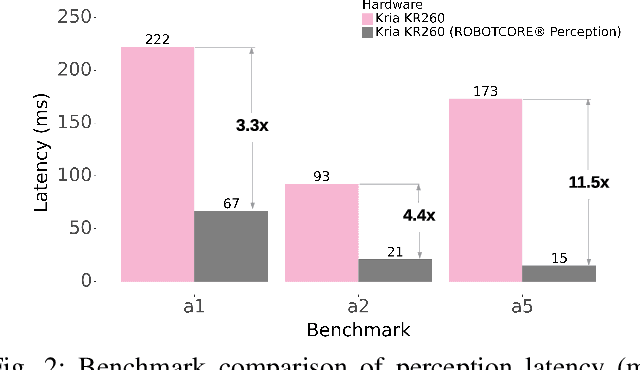

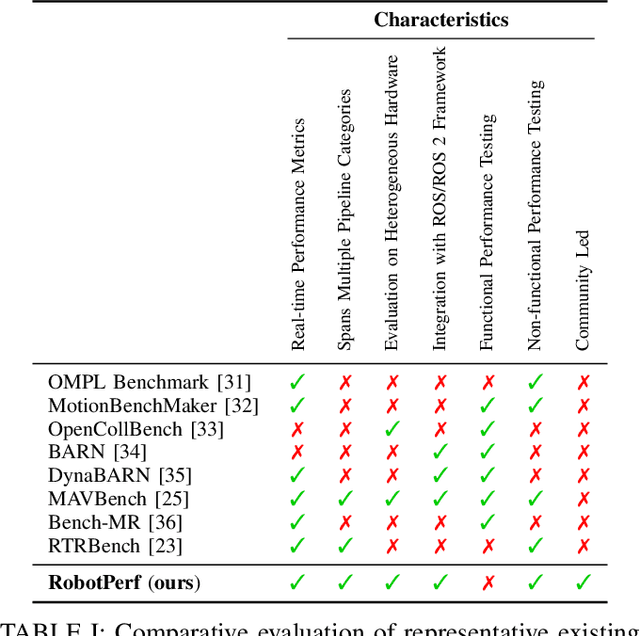
We introduce RobotPerf, a vendor-agnostic benchmarking suite designed to evaluate robotics computing performance across a diverse range of hardware platforms using ROS 2 as its common baseline. The suite encompasses ROS 2 packages covering the full robotics pipeline and integrates two distinct benchmarking approaches: black-box testing, which measures performance by eliminating upper layers and replacing them with a test application, and grey-box testing, an application-specific measure that observes internal system states with minimal interference. Our benchmarking framework provides ready-to-use tools and is easily adaptable for the assessment of custom ROS 2 computational graphs. Drawing from the knowledge of leading robot architects and system architecture experts, RobotPerf establishes a standardized approach to robotics benchmarking. As an open-source initiative, RobotPerf remains committed to evolving with community input to advance the future of hardware-accelerated robotics.
Datasheets for Machine Learning Sensors
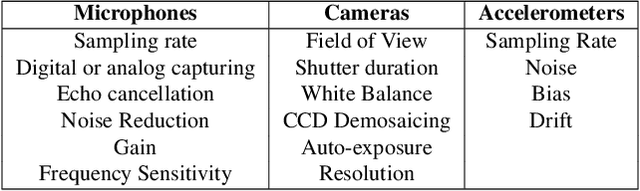
Jun 15, 2023Machine learning (ML) sensors offer a new paradigm for sensing that enables intelligence at the edge while empowering end-users with greater control of their data. As these ML sensors play a crucial role in the development of intelligent devices, clear documentation of their specifications, functionalities, and limitations is pivotal. This paper introduces a standard datasheet template for ML sensors and discusses its essential components including: the system's hardware, ML model and dataset attributes, end-to-end performance metrics, and environmental impact. We provide an example datasheet for our own ML sensor and discuss each section in detail. We highlight how these datasheets can facilitate better understanding and utilization of sensor data in ML applications, and we provide objective measures upon which system performance can be evaluated and compared. Together, ML sensors and their datasheets provide greater privacy, security, transparency, explainability, auditability, and user-friendliness for ML-enabled embedded systems. We conclude by emphasizing the need for standardization of datasheets across the broader ML community to ensure the responsible and effective use of sensor data.
Is TinyML Sustainable? Assessing the Environmental Impacts of Machine Learning on Microcontrollers
Jan 27, 2023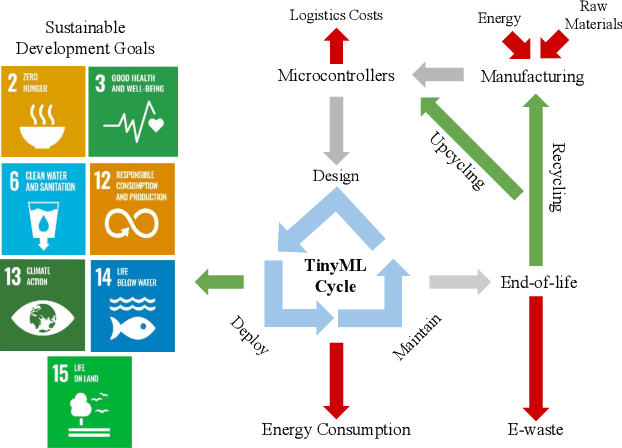
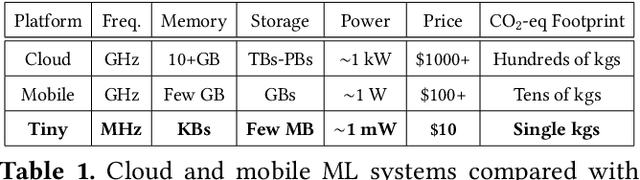
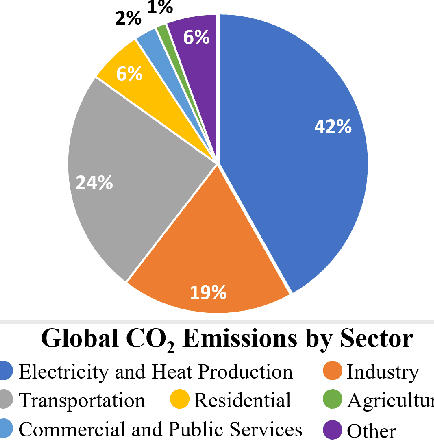
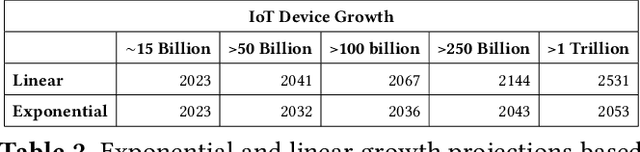
The sustained growth of carbon emissions and global waste elicits significant sustainability concerns for our environment's future. The growing Internet of Things (IoT) has the potential to exacerbate this issue. However, an emerging area known as Tiny Machine Learning (TinyML) has the opportunity to help address these environmental challenges through sustainable computing practices. TinyML, the deployment of machine learning (ML) algorithms onto low-cost, low-power microcontroller systems, enables on-device sensor analytics that unlocks numerous always-on ML applications. This article discusses the potential of these TinyML applications to address critical sustainability challenges. Moreover, the footprint of this emerging technology is assessed through a complete life cycle analysis of TinyML systems. From this analysis, TinyML presents opportunities to offset its carbon emissions by enabling applications that reduce the emissions of other sectors. Nevertheless, when globally scaled, the carbon footprint of TinyML systems is not negligible, necessitating that designers factor in environmental impact when formulating new devices. Finally, research directions for enabling further opportunities for TinyML to contribute to a sustainable future are outlined.
Machine Learning Sensors
Jun 07, 2022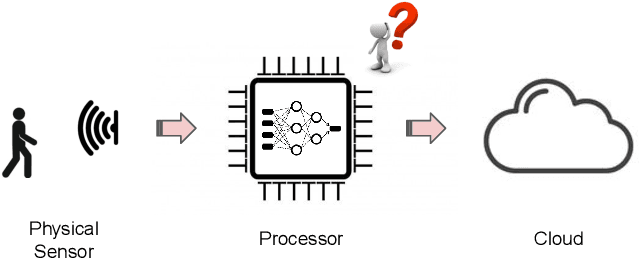
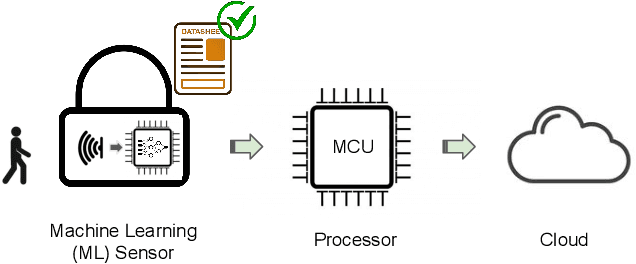
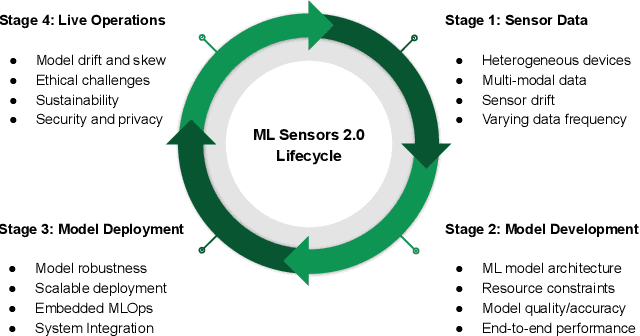
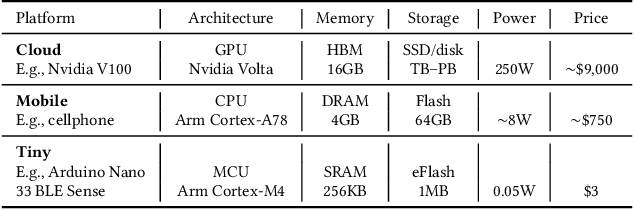
Machine learning sensors represent a paradigm shift for the future of embedded machine learning applications. Current instantiations of embedded machine learning (ML) suffer from complex integration, lack of modularity, and privacy and security concerns from data movement. This article proposes a more data-centric paradigm for embedding sensor intelligence on edge devices to combat these challenges. Our vision for "sensor 2.0" entails segregating sensor input data and ML processing from the wider system at the hardware level and providing a thin interface that mimics traditional sensors in functionality. This separation leads to a modular and easy-to-use ML sensor device. We discuss challenges presented by the standard approach of building ML processing into the software stack of the controlling microprocessor on an embedded system and how the modularity of ML sensors alleviates these problems. ML sensors increase privacy and accuracy while making it easier for system builders to integrate ML into their products as a simple component. We provide examples of prospective ML sensors and an illustrative datasheet as a demonstration and hope that this will build a dialogue to progress us towards sensor 2.0.
Widening Access to Applied Machine Learning with TinyML
Jun 09, 2021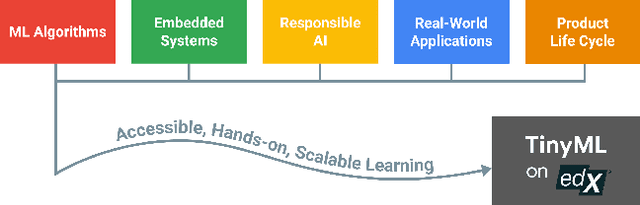
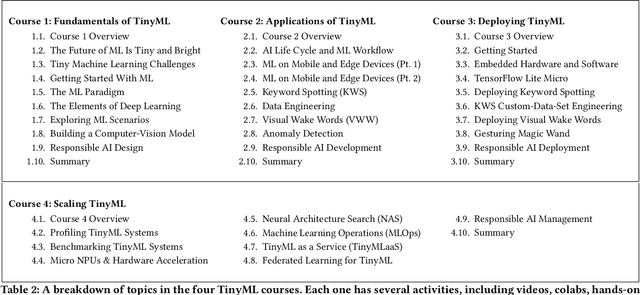
Broadening access to both computational and educational resources is critical to diffusing machine-learning (ML) innovation. However, today, most ML resources and experts are siloed in a few countries and organizations. In this paper, we describe our pedagogical approach to increasing access to applied ML through a massive open online course (MOOC) on Tiny Machine Learning (TinyML). We suggest that TinyML, ML on resource-constrained embedded devices, is an attractive means to widen access because TinyML both leverages low-cost and globally accessible hardware, and encourages the development of complete, self-contained applications, from data collection to deployment. To this end, a collaboration between academia (Harvard University) and industry (Google) produced a four-part MOOC that provides application-oriented instruction on how to develop solutions using TinyML. The series is openly available on the edX MOOC platform, has no prerequisites beyond basic programming, and is designed for learners from a global variety of backgrounds. It introduces pupils to real-world applications, ML algorithms, data-set engineering, and the ethical considerations of these technologies via hands-on programming and deployment of TinyML applications in both the cloud and their own microcontrollers. To facilitate continued learning, community building, and collaboration beyond the courses, we launched a standalone website, a forum, a chat, and an optional course-project competition. We also released the course materials publicly, hoping they will inspire the next generation of ML practitioners and educators and further broaden access to cutting-edge ML technologies.