 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWINA: Weight Informed Neuron Activation for Accelerating Large Language Model Inference
May 26, 2025The growing computational demands of large language models (LLMs) make efficient inference and activation strategies increasingly critical. While recent approaches, such as Mixture-of-Experts (MoE), leverage selective activation but require specialized training, training-free sparse activation methods offer broader applicability and superior resource efficiency through their plug-and-play design. However, many existing methods rely solely on hidden state magnitudes to determine activation, resulting in high approximation errors and suboptimal inference accuracy. To address these limitations, we propose WINA (Weight Informed Neuron Activation), a novel, simple, and training-free sparse activation framework that jointly considers hidden state magnitudes and the column-wise $\ell_2$-norms of weight matrices. We show that this leads to a sparsification strategy that obtains optimal approximation error bounds with theoretical guarantees tighter than existing techniques. Empirically, WINA also outperforms state-of-the-art methods (e.g., TEAL) by up to $2.94\%$ in average performance at the same sparsity levels, across a diverse set of LLM architectures and datasets. These results position WINA as a new performance frontier for training-free sparse activation in LLM inference, advancing training-free sparse activation methods and setting a robust baseline for efficient inference. The source code is available at https://github.com/microsoft/wina.
Automatic Joint Structured Pruning and Quantization for Efficient Neural Network Training and Compression
Feb 23, 2025Structured pruning and quantization are fundamental techniques used to reduce the size of deep neural networks (DNNs) and typically are applied independently. Applying these techniques jointly via co-optimization has the potential to produce smaller, high-quality models. However, existing joint schemes are not widely used because of (1) engineering difficulties (complicated multi-stage processes), (2) black-box optimization (extensive hyperparameter tuning to control the overall compression), and (3) insufficient architecture generalization. To address these limitations, we present the framework GETA, which automatically and efficiently performs joint structured pruning and quantization-aware training on any DNNs. GETA introduces three key innovations: (i) a quantization-aware dependency graph (QADG) that constructs a pruning search space for generic quantization-aware DNN, (ii) a partially projected stochastic gradient method that guarantees layerwise bit constraints are satisfied, and (iii) a new joint learning strategy that incorporates interpretable relationships between pruning and quantization. We present numerical experiments on both convolutional neural networks and transformer architectures that show that our approach achieves competitive (often superior) performance compared to existing joint pruning and quantization methods.
Fast Data Aware Neural Architecture Search via Supernet Accelerated Evaluation
Feb 18, 2025



Tiny machine learning (TinyML) promises to revolutionize fields such as healthcare, environmental monitoring, and industrial maintenance by running machine learning models on low-power embedded systems. However, the complex optimizations required for successful TinyML deployment continue to impede its widespread adoption. A promising route to simplifying TinyML is through automatic machine learning (AutoML), which can distill elaborate optimization workflows into accessible key decisions. Notably, Hardware Aware Neural Architecture Searches - where a computer searches for an optimal TinyML model based on predictive performance and hardware metrics - have gained significant traction, producing some of today's most widely used TinyML models. Nevertheless, limiting optimization solely to neural network architectures can prove insufficient. Because TinyML systems must operate under extremely tight resource constraints, the choice of input data configuration, such as resolution or sampling rate, also profoundly impacts overall system efficiency. Achieving truly optimal TinyML systems thus requires jointly tuning both input data and model architecture. Despite its importance, this "Data Aware Neural Architecture Search" remains underexplored. To address this gap, we propose a new state-of-the-art Data Aware Neural Architecture Search technique and demonstrate its effectiveness on the novel TinyML ``Wake Vision'' dataset. Our experiments show that across varying time and hardware constraints, Data Aware Neural Architecture Search consistently discovers superior TinyML systems compared to purely architecture-focused methods, underscoring the critical role of data-aware optimization in advancing TinyML.
Wake Vision: A Large-scale, Diverse Dataset and Benchmark Suite for TinyML Person Detection
May 01, 2024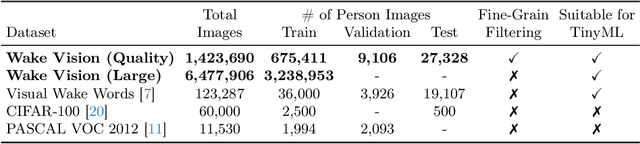
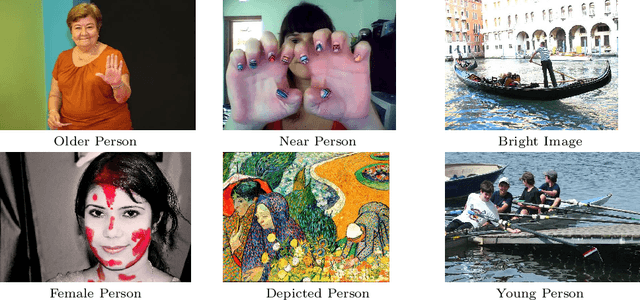
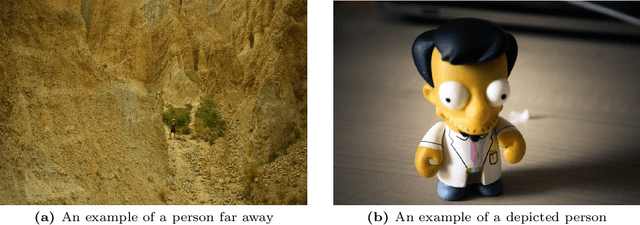

Machine learning applications on extremely low-power devices, commonly referred to as tiny machine learning (TinyML), promises a smarter and more connected world. However, the advancement of current TinyML research is hindered by the limited size and quality of pertinent datasets. To address this challenge, we introduce Wake Vision, a large-scale, diverse dataset tailored for person detection -- the canonical task for TinyML visual sensing. Wake Vision comprises over 6 million images, which is a hundredfold increase compared to the previous standard, and has undergone thorough quality filtering. Using Wake Vision for training results in a 2.41\% increase in accuracy compared to the established benchmark. Alongside the dataset, we provide a collection of five detailed benchmark sets that assess model performance on specific segments of the test data, such as varying lighting conditions, distances from the camera, and demographic characteristics of subjects. These novel fine-grained benchmarks facilitate the evaluation of model quality in challenging real-world scenarios that are often ignored when focusing solely on overall accuracy. Through an evaluation of a MobileNetV2 TinyML model on the benchmarks, we show that the input resolution plays a more crucial role than the model width in detecting distant subjects and that the impact of quantization on model robustness is minimal, thanks to the dataset quality. These findings underscore the importance of a detailed evaluation to identify essential factors for model development. The dataset, benchmark suite, code, and models are publicly available under the CC-BY 4.0 license, enabling their use for commercial use cases.
MobileNetV4 -- Universal Models for the Mobile Ecosystem
Apr 16, 2024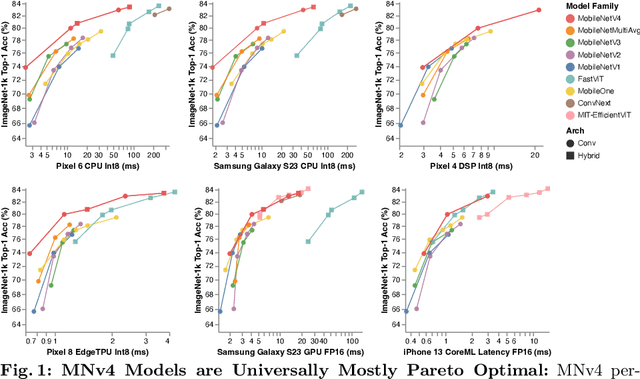
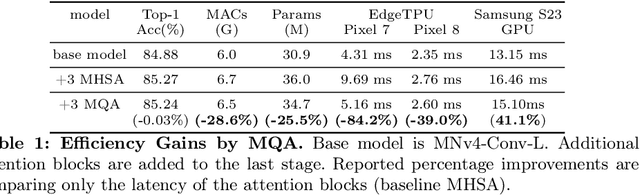
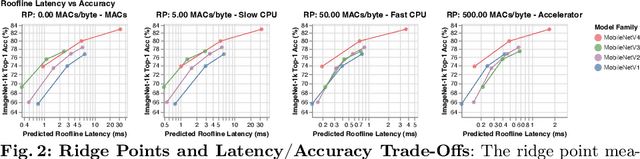
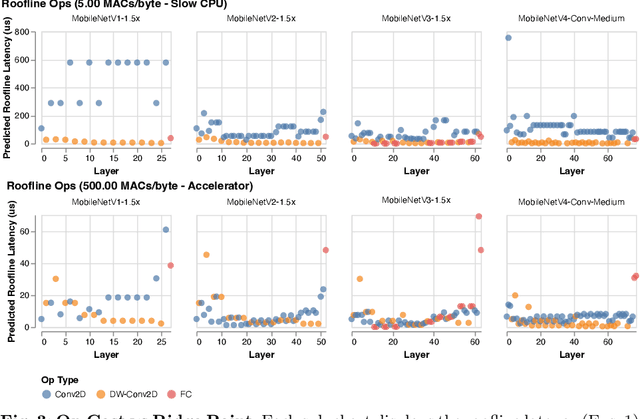
We present the latest generation of MobileNets, known as MobileNetV4 (MNv4), featuring universally efficient architecture designs for mobile devices. At its core, we introduce the Universal Inverted Bottleneck (UIB) search block, a unified and flexible structure that merges Inverted Bottleneck (IB), ConvNext, Feed Forward Network (FFN), and a novel Extra Depthwise (ExtraDW) variant. Alongside UIB, we present Mobile MQA, an attention block tailored for mobile accelerators, delivering a significant 39% speedup. An optimized neural architecture search (NAS) recipe is also introduced which improves MNv4 search effectiveness. The integration of UIB, Mobile MQA and the refined NAS recipe results in a new suite of MNv4 models that are mostly Pareto optimal across mobile CPUs, DSPs, GPUs, as well as specialized accelerators like Apple Neural Engine and Google Pixel EdgeTPU - a characteristic not found in any other models tested. Finally, to further boost accuracy, we introduce a novel distillation technique. Enhanced by this technique, our MNv4-Hybrid-Large model delivers 87% ImageNet-1K accuracy, with a Pixel 8 EdgeTPU runtime of just 3.8ms.
Is TinyML Sustainable? Assessing the Environmental Impacts of Machine Learning on Microcontrollers
Jan 27, 2023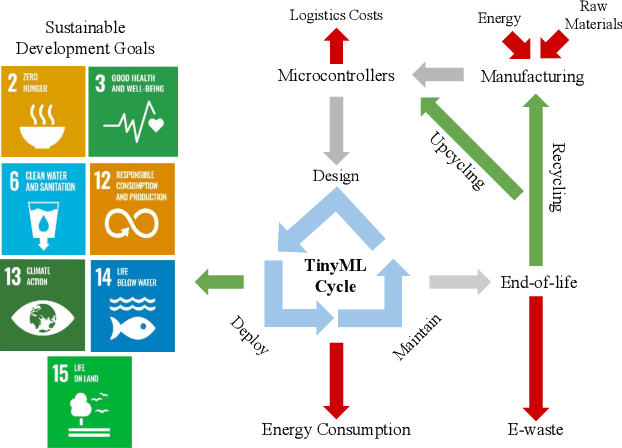
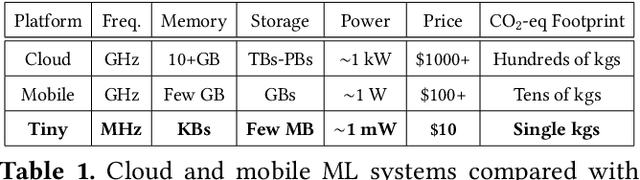
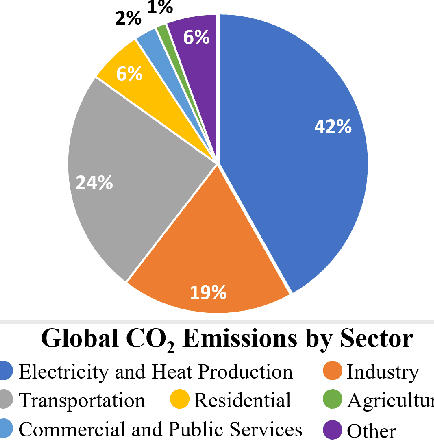
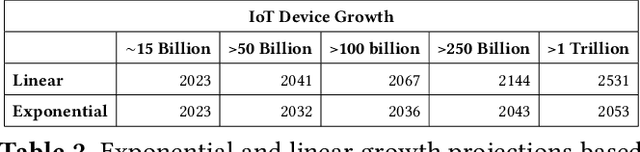
The sustained growth of carbon emissions and global waste elicits significant sustainability concerns for our environment's future. The growing Internet of Things (IoT) has the potential to exacerbate this issue. However, an emerging area known as Tiny Machine Learning (TinyML) has the opportunity to help address these environmental challenges through sustainable computing practices. TinyML, the deployment of machine learning (ML) algorithms onto low-cost, low-power microcontroller systems, enables on-device sensor analytics that unlocks numerous always-on ML applications. This article discusses the potential of these TinyML applications to address critical sustainability challenges. Moreover, the footprint of this emerging technology is assessed through a complete life cycle analysis of TinyML systems. From this analysis, TinyML presents opportunities to offset its carbon emissions by enabling applications that reduce the emissions of other sectors. Nevertheless, when globally scaled, the carbon footprint of TinyML systems is not negligible, necessitating that designers factor in environmental impact when formulating new devices. Finally, research directions for enabling further opportunities for TinyML to contribute to a sustainable future are outlined.
XRBench: An Extended Reality (XR) Machine Learning Benchmark Suite for the Metaverse
Nov 16, 2022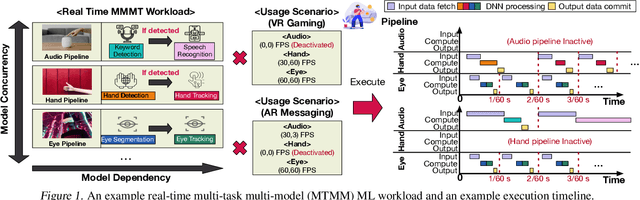
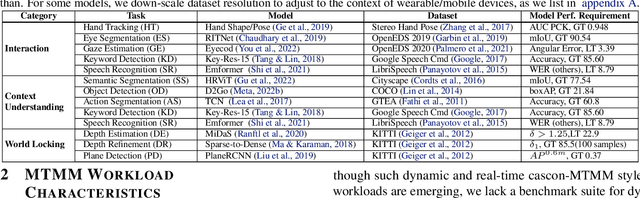

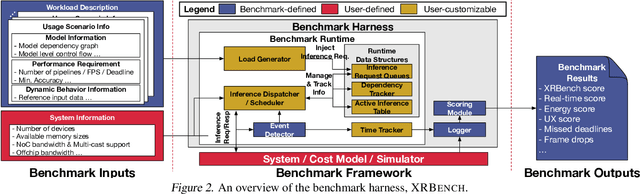
Real-time multi-model multi-task (MMMT) workloads, a new form of deep learning inference workloads, are emerging for applications areas like extended reality (XR) to support metaverse use cases. These workloads combine user interactivity with computationally complex machine learning (ML) activities. Compared to standard ML applications, these ML workloads present unique difficulties and constraints. Real-time MMMT workloads impose heterogeneity and concurrency requirements on future ML systems and devices, necessitating the development of new capabilities. This paper begins with a discussion of the various characteristics of these real-time MMMT ML workloads and presents an ontology for evaluating the performance of future ML hardware for XR systems. Next, we present XRBench, a collection of MMMT ML tasks, models, and usage scenarios that execute these models in three representative ways: cascaded, concurrent, and cascaded-concurrency for XR use cases. Finally, we emphasize the need for new metrics that capture the requirements properly. We hope that our work will stimulate research and lead to the development of a new generation of ML systems for XR use cases.
DataPerf: Benchmarks for Data-Centric AI Development
Jul 20, 2022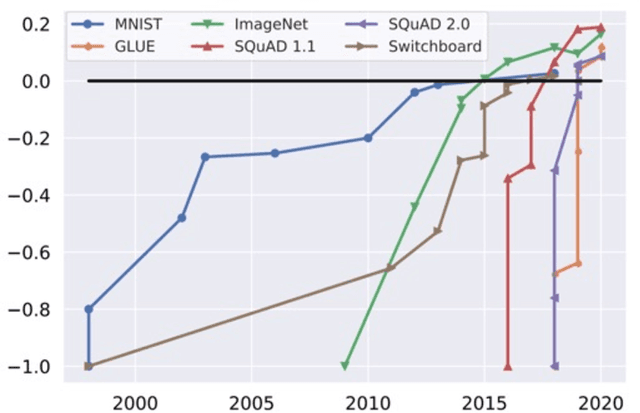
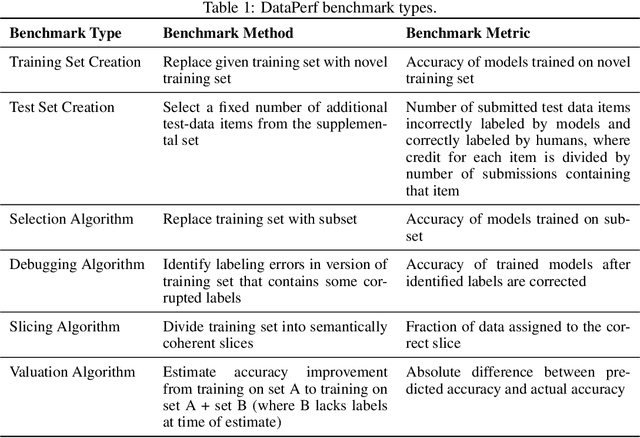
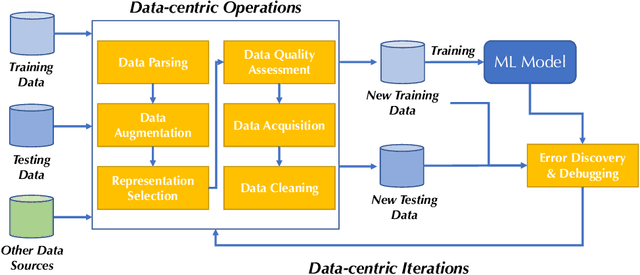
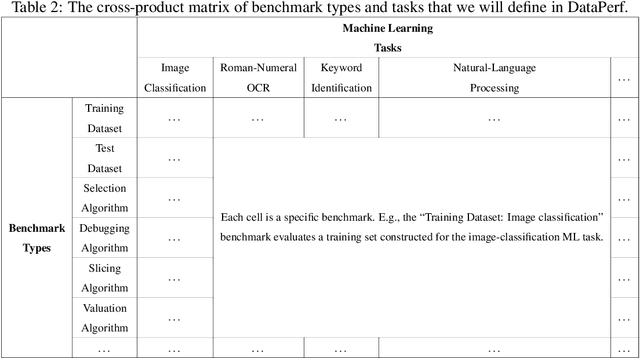
Machine learning (ML) research has generally focused on models, while the most prominent datasets have been employed for everyday ML tasks without regard for the breadth, difficulty, and faithfulness of these datasets to the underlying problem. Neglecting the fundamental importance of datasets has caused major problems involving data cascades in real-world applications and saturation of dataset-driven criteria for model quality, hindering research growth. To solve this problem, we present DataPerf, a benchmark package for evaluating ML datasets and dataset-working algorithms. We intend it to enable the "data ratchet," in which training sets will aid in evaluating test sets on the same problems, and vice versa. Such a feedback-driven strategy will generate a virtuous loop that will accelerate development of data-centric AI. The MLCommons Association will maintain DataPerf.
Machine Learning Sensors
Jun 07, 2022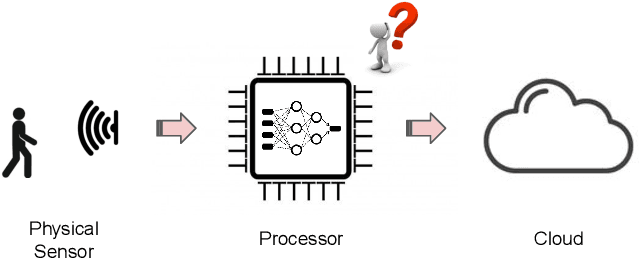
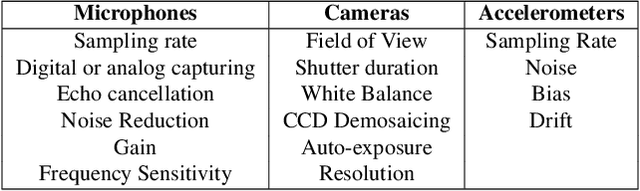
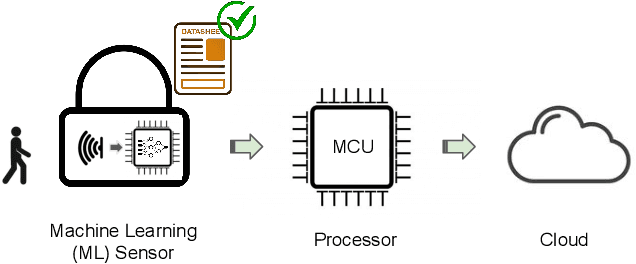
Machine learning sensors represent a paradigm shift for the future of embedded machine learning applications. Current instantiations of embedded machine learning (ML) suffer from complex integration, lack of modularity, and privacy and security concerns from data movement. This article proposes a more data-centric paradigm for embedding sensor intelligence on edge devices to combat these challenges. Our vision for "sensor 2.0" entails segregating sensor input data and ML processing from the wider system at the hardware level and providing a thin interface that mimics traditional sensors in functionality. This separation leads to a modular and easy-to-use ML sensor device. We discuss challenges presented by the standard approach of building ML processing into the software stack of the controlling microprocessor on an embedded system and how the modularity of ML sensors alleviates these problems. ML sensors increase privacy and accuracy while making it easier for system builders to integrate ML into their products as a simple component. We provide examples of prospective ML sensors and an illustrative datasheet as a demonstration and hope that this will build a dialogue to progress us towards sensor 2.0.
Tiny Robot Learning: Challenges and Directions for Machine Learning in Resource-Constrained Robots
May 11, 2022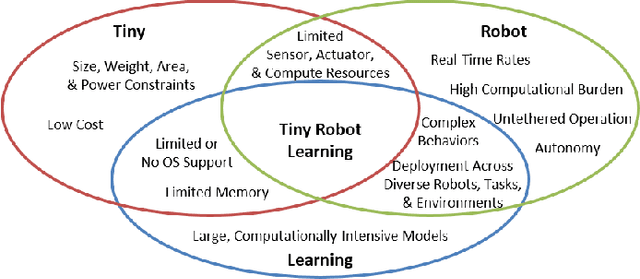
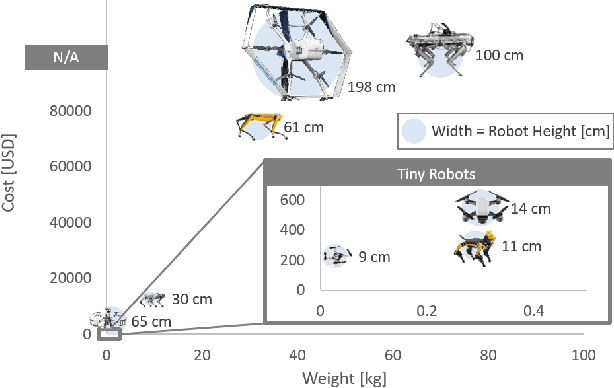
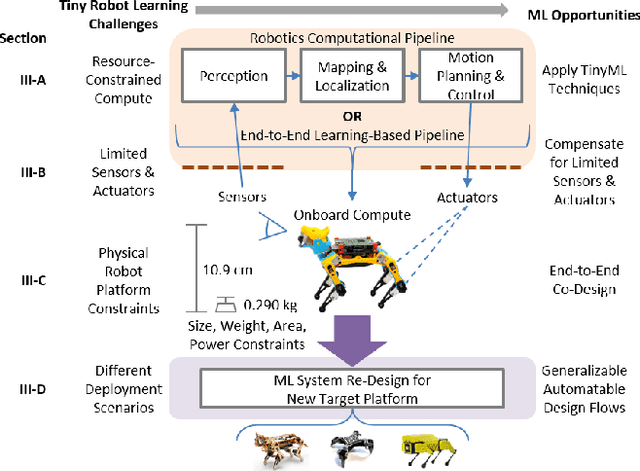
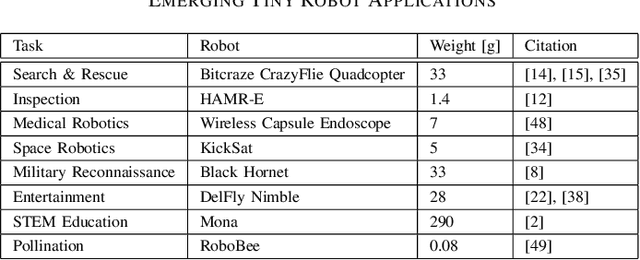
Machine learning (ML) has become a pervasive tool across computing systems. An emerging application that stress-tests the challenges of ML system design is tiny robot learning, the deployment of ML on resource-constrained low-cost autonomous robots. Tiny robot learning lies at the intersection of embedded systems, robotics, and ML, compounding the challenges of these domains. Tiny robot learning is subject to challenges from size, weight, area, and power (SWAP) constraints; sensor, actuator, and compute hardware limitations; end-to-end system tradeoffs; and a large diversity of possible deployment scenarios. Tiny robot learning requires ML models to be designed with these challenges in mind, providing a crucible that reveals the necessity of holistic ML system design and automated end-to-end design tools for agile development. This paper gives a brief survey of the tiny robot learning space, elaborates on key challenges, and proposes promising opportunities for future work in ML system design.