 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAVFI: An End-to-End Fault Analysis Framework with Anomaly Detection and Recovery for Micro Aerial Vehicles
Paper and Code
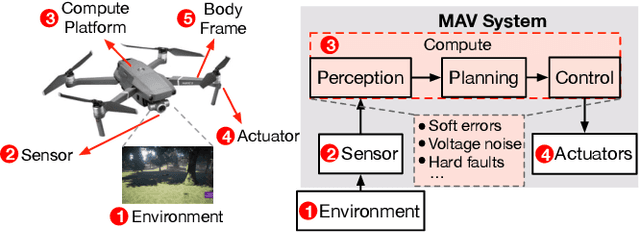

Reliability and safety are critical in autonomous machine services, such as autonomous vehicles and aerial drones. In this paper, we first present an open-source Micro Aerial Vehicles (MAVs) reliability analysis framework, MAVFI, to characterize transient fault's impacts on the end-to-end flight metrics, e.g., flight time, success rate. Based on our framework, it is observed that the end-to-end fault tolerance analysis is essential for characterizing system reliability. We demonstrate the planning and control stages are more vulnerable to transient faults than the visual perception stage in the common "Perception-Planning-Control (PPC)" compute pipeline. Furthermore, to improve the reliability of the MAV system, we propose two low overhead anomaly-based transient fault detection and recovery schemes based on Gaussian statistical models and autoencoder neural networks. We validate our anomaly fault protection schemes with a variety of simulated photo-realistic environments on both Intel i9 CPU and ARM Cortex-A57 on Nvidia TX2 platform. It is demonstrated that the autoencoder-based scheme can improve the system reliability by 100% recovering failure cases with less than 0.0062% computational overhead in best-case scenarios. In addition, MAVFI framework can be used for other ROS-based cyber-physical applications and is open-sourced at https://github.com/harvard-edge/MAVBench/tree/mavfi