 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOMU: A Probabilistic 3D Occupancy Mapping Accelerator for Real-time OctoMap at the Edge
Paper and Code
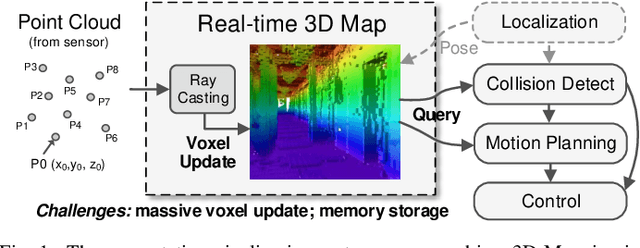
Autonomous machines (e.g., vehicles, mobile robots, drones) require sophisticated 3D mapping to perceive the dynamic environment. However, maintaining a real-time 3D map is expensive both in terms of compute and memory requirements, especially for resource-constrained edge machines. Probabilistic OctoMap is a reliable and memory-efficient 3D dense map model to represent the full environment, with dynamic voxel node pruning and expansion capacity. This paper presents the first efficient accelerator solution, i.e. OMU, to enable real-time probabilistic 3D mapping at the edge. To improve the performance, the input map voxels are updated via parallel PE units for data parallelism. Within each PE, the voxels are stored using a specially developed data structure in parallel memory banks. In addition, a pruning address manager is designed within each PE unit to reuse the pruned memory addresses. The proposed 3D mapping accelerator is implemented and evaluated using a commercial 12 nm technology. Compared to the ARM Cortex-A57 CPU in the Nvidia Jetson TX2 platform, the proposed accelerator achieves up to 62$\times$ performance and 708$\times$ energy efficiency improvement. Furthermore, the accelerator provides 63 FPS throughput, more than 2$\times$ higher than a real-time requirement, enabling real-time perception for 3D mapping.