 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotPerf: An Open-Source, Vendor-Agnostic, Benchmarking Suite for Evaluating Robotics Computing System Performance
Sep 17, 2023
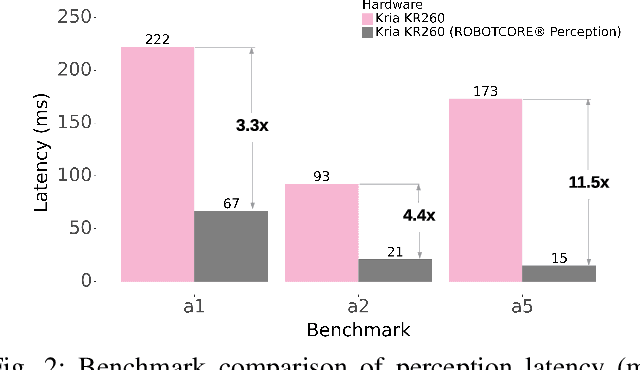

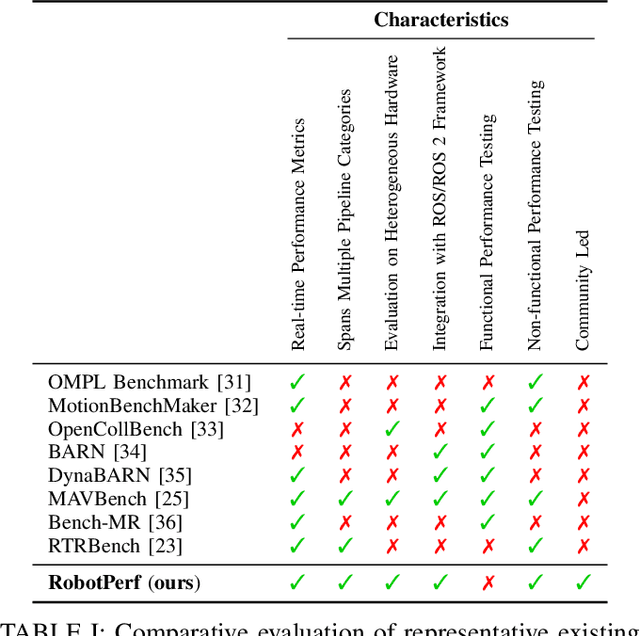
We introduce RobotPerf, a vendor-agnostic benchmarking suite designed to evaluate robotics computing performance across a diverse range of hardware platforms using ROS 2 as its common baseline. The suite encompasses ROS 2 packages covering the full robotics pipeline and integrates two distinct benchmarking approaches: black-box testing, which measures performance by eliminating upper layers and replacing them with a test application, and grey-box testing, an application-specific measure that observes internal system states with minimal interference. Our benchmarking framework provides ready-to-use tools and is easily adaptable for the assessment of custom ROS 2 computational graphs. Drawing from the knowledge of leading robot architects and system architecture experts, RobotPerf establishes a standardized approach to robotics benchmarking. As an open-source initiative, RobotPerf remains committed to evolving with community input to advance the future of hardware-accelerated robotics.
Adaptive Computing in Robotics, Leveraging ROS 2 to Enable Software-Defined Hardware for FPGAs
Aug 30, 2021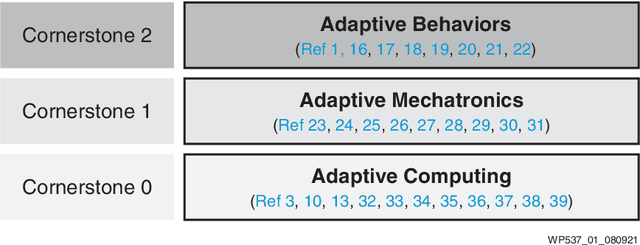
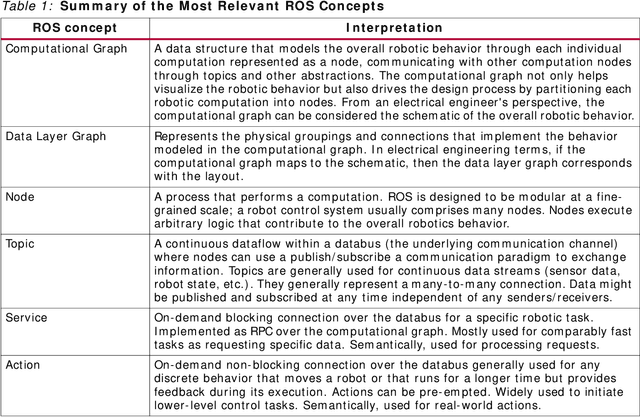
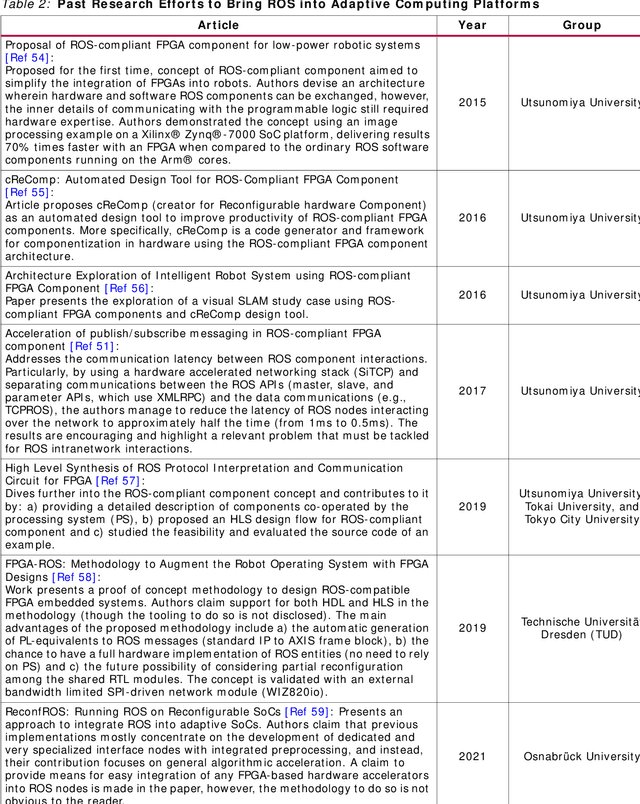
Traditional software development in robotics is about programming functionality in the CPU of a given robot with a pre-defined architecture and constraints. With adaptive computing, instead, building a robotic behavior is about programming an architecture. By leveraging adaptive computing, roboticists can adapt one or more of the properties of its computing systems (e.g. its determinism, power consumption, security posture, or throughput) at run time. Roboticists are not, however, hardware engineers, and embedded expertise is scarce among them. This white paper adopts a ROS 2 roboticist-centric view for adaptive computing and proposes an architecture to include FPGAs as a first-class participant of the ROS 2 ecosystem. The architecture proposed is platform- and technology-agnostic, and is easily portable. The core components of the architecture are disclosed under an Apache 2.0 license, paving the way for roboticists to leverage adaptive computing and create software-defined hardware.