 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe High-Assurance ROS Framework
Mar 02, 2021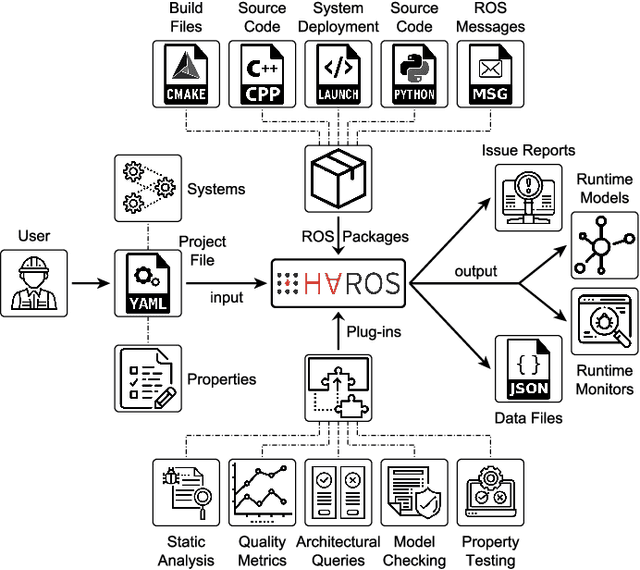
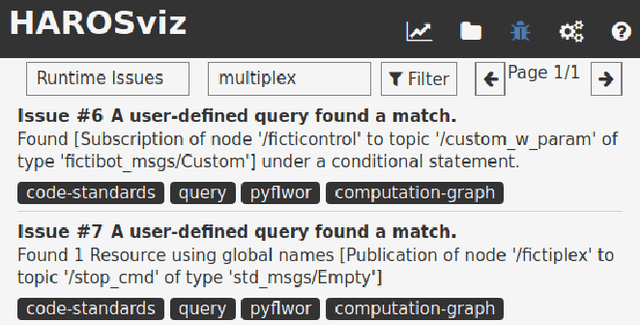
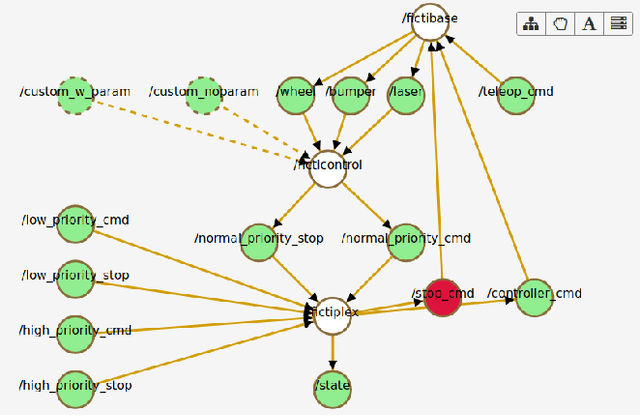
This tool paper presents the High-Assurance ROS (HAROS) framework. HAROS is a framework for the analysis and quality improvement of robotics software developed using the popular Robot Operating System (ROS). It builds on a static analysis foundation to automatically extract models from the source code. Such models are later used to enable other sorts of analyses, such as Model Checking, Runtime Verification, and Property-based Testing. It has been applied to multiple real-world examples, helping developers find and correct various issues.
alurity, a toolbox for robot cybersecurity
Oct 16, 2020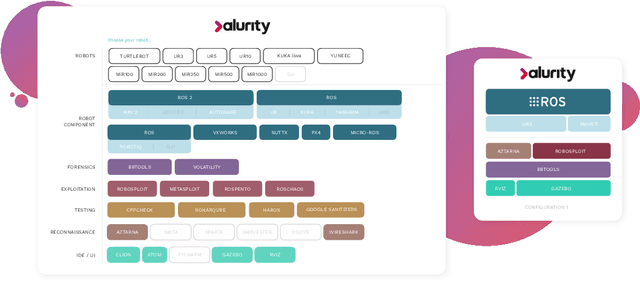
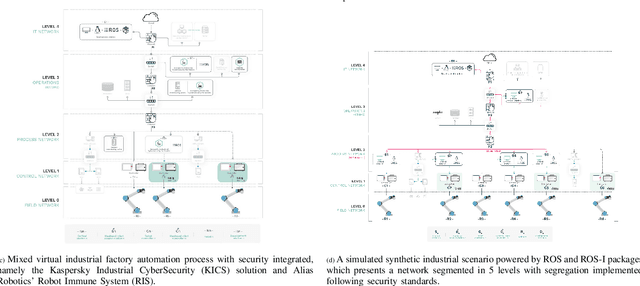
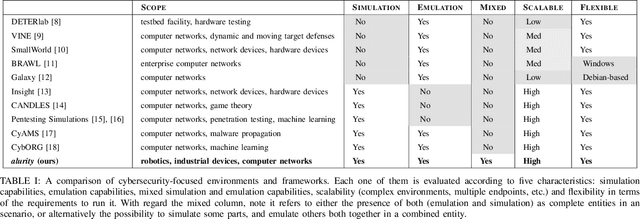
The reuse of technologies and inherent complexity of most robotic systems is increasingly leading to robots with wide attack surfaces and a variety of potential vulnerabilities. Given their growing presence in public environments, security research is increasingly becoming more important than in any other area, specially due to the safety implications that robot vulnerabilities could cause on humans. We argue that security triage in robotics is still immature and that new tools must be developed to accelerate the testing-triage-exploitation cycle, necessary for prioritizing and accelerating the mitigation of flaws. The present work tackles the current lack of offensive cybersecurity research in robotics by presenting a toolbox and the results obtained with it through several use cases conducted over a year period. We propose a modular and composable toolbox for robot cybersecurity: alurity. By ensuring that both roboticists and security researchers working on a project have a common, consistent and easily reproducible development environment, alurity aims to facilitate the cybersecurity research and the collaboration across teams.