Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe High-Assurance ROS Framework
Paper and Code
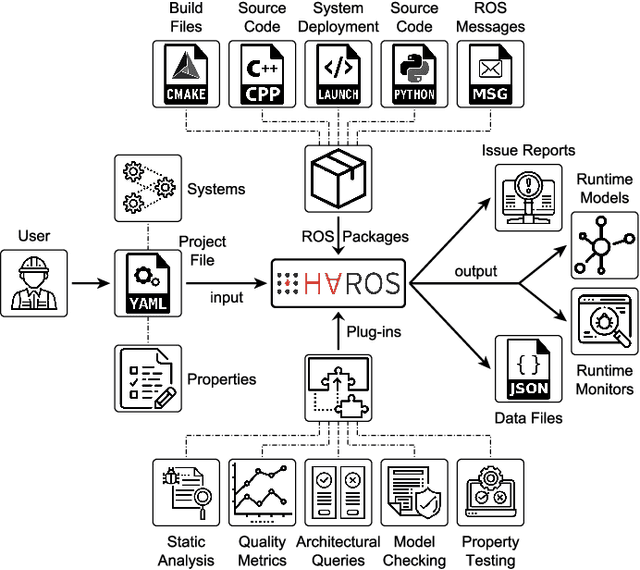
This tool paper presents the High-Assurance ROS (HAROS) framework. HAROS is a framework for the analysis and quality improvement of robotics software developed using the popular Robot Operating System (ROS). It builds on a static analysis foundation to automatically extract models from the source code. Such models are later used to enable other sorts of analyses, such as Model Checking, Runtime Verification, and Property-based Testing. It has been applied to multiple real-world examples, helping developers find and correct various issues.
* 4 pages, 4 figures, to appear in: Proceedings of the 3rd
International Workshop on Robotics Software Engineering (RoSE@ICSE 2021),
Madrid, Spain
View paper on