 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe High-Assurance ROS Framework
Mar 02, 2021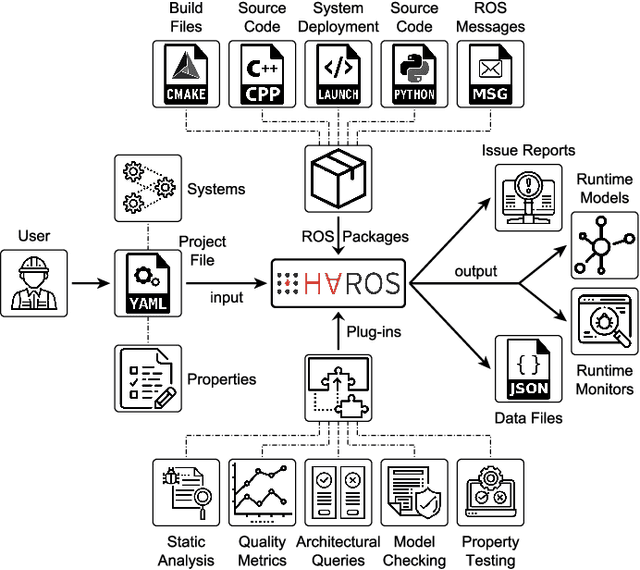
This tool paper presents the High-Assurance ROS (HAROS) framework. HAROS is a framework for the analysis and quality improvement of robotics software developed using the popular Robot Operating System (ROS). It builds on a static analysis foundation to automatically extract models from the source code. Such models are later used to enable other sorts of analyses, such as Model Checking, Runtime Verification, and Property-based Testing. It has been applied to multiple real-world examples, helping developers find and correct various issues.
ROSY: An elegant language to teach the pure reactive nature of robot programming
Nov 08, 2019
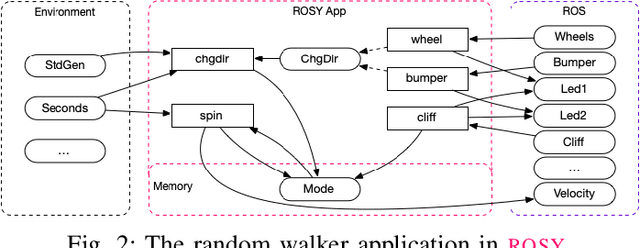
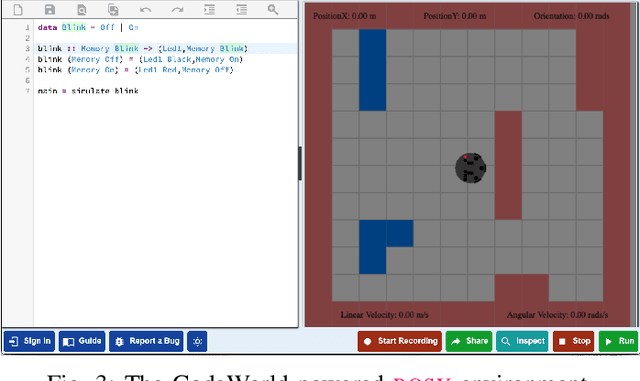
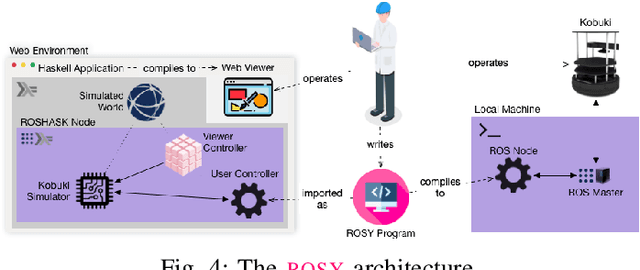
Robotics is incredibly fun and is long recognized as a great way to teach programming, while drawing inspiring connections to other branches of engineering and science such as maths, physics or electronics. Although this symbiotic relationship between robotics and programming is perceived as largely beneficial, educational approaches often feel the need to hide the underlying complexity of the robotic system, but as a result fail to transmit the reactive essence of robot programming to the roboticists and programmers of the future. This paper presents ROSY, a novel language for teaching novice programmers through robotics. Its functional style is both familiar with a high-school algebra background and a materialization of the inherent reactive nature of robotic programming. Working at a higher-level of abstraction also teaches valuable design principles of decomposition of robotics software into collections of interacting controllers. Despite its simplicity, ROSY is completely valid Haskell code compatible with the ROS ecosystem. We make a convincing case for our language by demonstrating how non-trivial applications can be expressed with ease and clarity, exposing its sound functional programming foundations, and developing a web-enabled robot programming environment.