 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dataset and Preliminary Study of Using GPT-5 for Code-change Impact Analysis
Dec 22, 2025Understanding source code changes and their impact on other code entities is a crucial skill in software development. However, the analysis of code changes and their impact is often performed manually and therefore is time-consuming. Recent advancements in AI, and in particular large language models (LLMs) show promises to help developers in various code analysis tasks. However, the extent to which this potential can be utilized for understanding code changes and their impact is underexplored. To address this gap, we study the capabilities of GPT-5 and GPT-5-mini to predict the code entities impacted by given source code changes. We construct a dataset containing information about seed-changes, change pairs, and change types for each commit. Existing datasets lack crucial information about seed changes and impacted code entities. Our experiments evaluate the LLMs in two configurations: (1) seed-change information and the parent commit tree and (2) seed-change information, the parent commit tree, and the diff hunk of each seed change. We found that both LLMs perform poorly in the two experiments, whereas GPT-5 outperforms GPT-5-mini. Furthermore, the provision of the diff hunks helps both models to slightly improve their performance.
Lost in Translation? Converting RegExes for Log Parsing into Dynatrace Pattern Language
Jun 24, 2025Log files provide valuable information for detecting and diagnosing problems in enterprise software applications and data centers. Several log analytics tools and platforms were developed to help filter and extract information from logs, typically using regular expressions (RegExes). Recent commercial log analytics platforms provide domain-specific languages specifically designed for log parsing, such as Grok or the Dynatrace Pattern Language (DPL). However, users who want to migrate to these platforms must manually convert their RegExes into the new pattern language, which is costly and error-prone. In this work, we present Reptile, which combines a rule-based approach for converting RegExes into DPL patterns with a best-effort approach for cases where a full conversion is impossible. Furthermore, it integrates GPT-4 to optimize the obtained DPL patterns. The evaluation with 946 RegExes collected from a large company shows that Reptile safely converted 73.7% of them. The evaluation of Reptile's pattern optimization with 23 real-world RegExes showed an F1-score and MCC above 0.91. These results are promising and have ample practical implications for companies that migrate to a modern log analytics platform, such as Dynatrace.
RobotPerf: An Open-Source, Vendor-Agnostic, Benchmarking Suite for Evaluating Robotics Computing System Performance
Sep 17, 2023
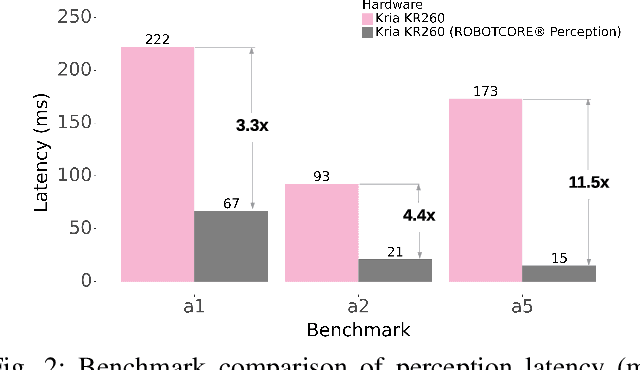

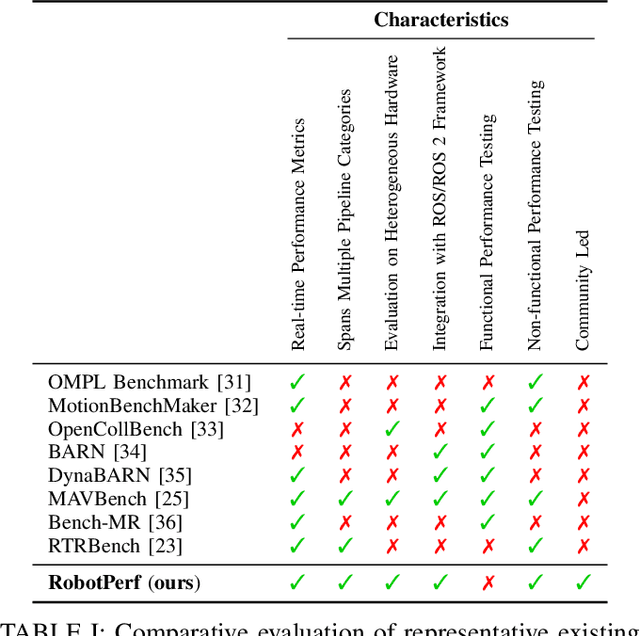
We introduce RobotPerf, a vendor-agnostic benchmarking suite designed to evaluate robotics computing performance across a diverse range of hardware platforms using ROS 2 as its common baseline. The suite encompasses ROS 2 packages covering the full robotics pipeline and integrates two distinct benchmarking approaches: black-box testing, which measures performance by eliminating upper layers and replacing them with a test application, and grey-box testing, an application-specific measure that observes internal system states with minimal interference. Our benchmarking framework provides ready-to-use tools and is easily adaptable for the assessment of custom ROS 2 computational graphs. Drawing from the knowledge of leading robot architects and system architecture experts, RobotPerf establishes a standardized approach to robotics benchmarking. As an open-source initiative, RobotPerf remains committed to evolving with community input to advance the future of hardware-accelerated robotics.
ExploitFlow, cyber security exploitation routes for Game Theory and AI research in robotics
Aug 04, 2023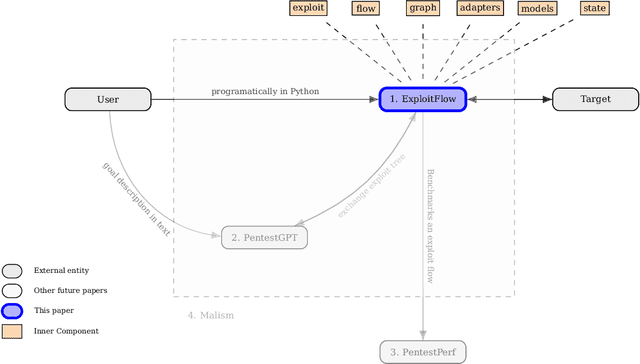
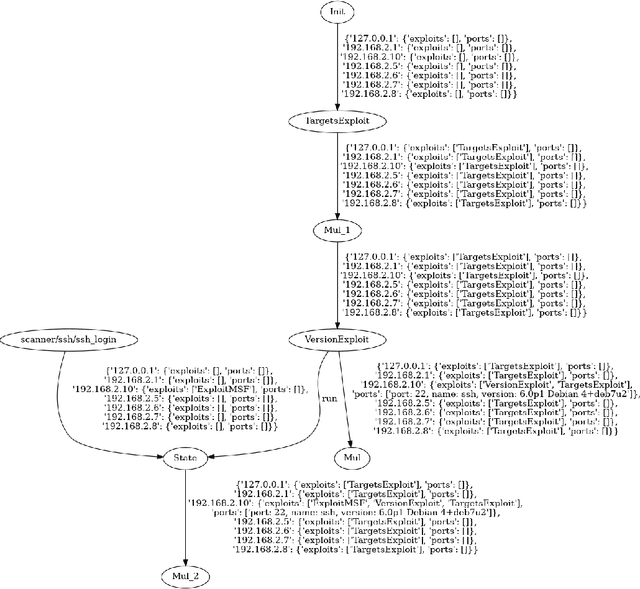
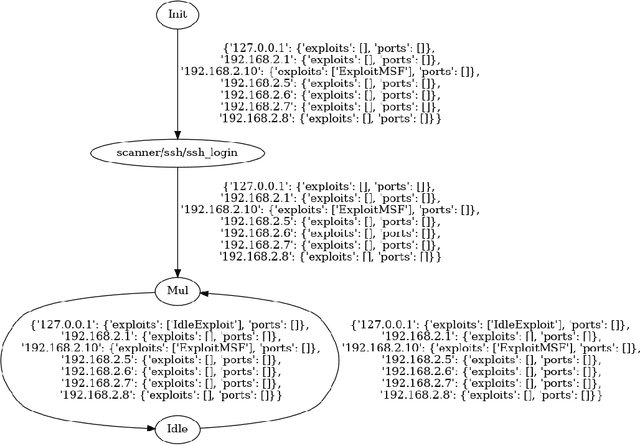
This paper addresses the prevalent lack of tools to facilitate and empower Game Theory and Artificial Intelligence (AI) research in cybersecurity. The primary contribution is the introduction of ExploitFlow (EF), an AI and Game Theory-driven modular library designed for cyber security exploitation. EF aims to automate attacks, combining exploits from various sources, and capturing system states post-action to reason about them and understand potential attack trees. The motivation behind EF is to bolster Game Theory and AI research in cybersecurity, with robotics as the initial focus. Results indicate that EF is effective for exploring machine learning in robot cybersecurity. An artificial agent powered by EF, using Reinforcement Learning, outperformed both brute-force and human expert approaches, laying the path for using ExploitFlow for further research. Nonetheless, we identified several limitations in EF-driven agents, including a propensity to overfit, the scarcity and production cost of datasets for generalization, and challenges in interpreting networking states across varied security settings. To leverage the strengths of ExploitFlow while addressing identified shortcomings, we present Malism, our vision for a comprehensive automated penetration testing framework with ExploitFlow at its core.
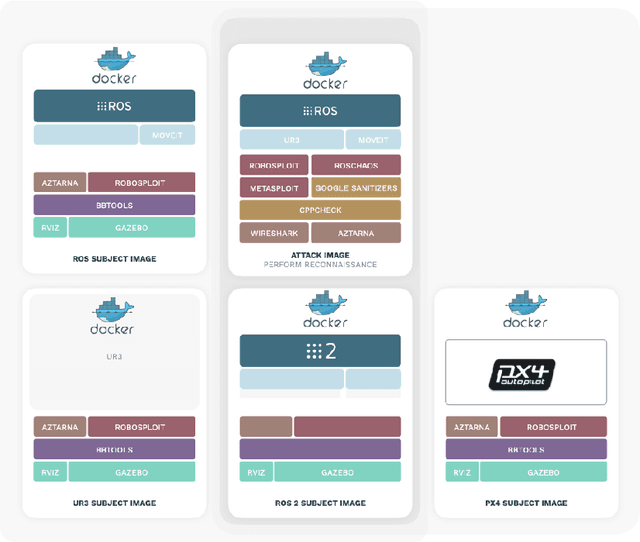
alurity, a toolbox for robot cybersecurity
Oct 16, 2020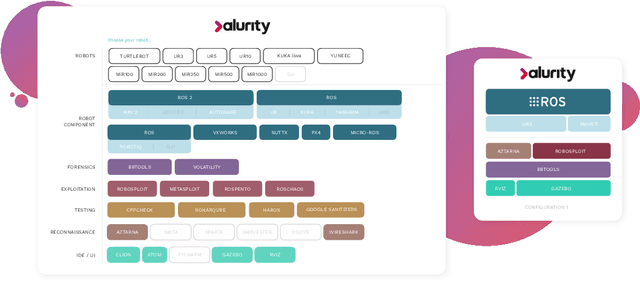
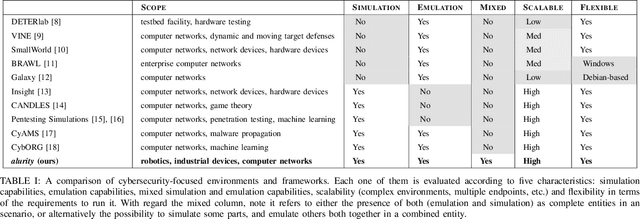
The reuse of technologies and inherent complexity of most robotic systems is increasingly leading to robots with wide attack surfaces and a variety of potential vulnerabilities. Given their growing presence in public environments, security research is increasingly becoming more important than in any other area, specially due to the safety implications that robot vulnerabilities could cause on humans. We argue that security triage in robotics is still immature and that new tools must be developed to accelerate the testing-triage-exploitation cycle, necessary for prioritizing and accelerating the mitigation of flaws. The present work tackles the current lack of offensive cybersecurity research in robotics by presenting a toolbox and the results obtained with it through several use cases conducted over a year period. We propose a modular and composable toolbox for robot cybersecurity: alurity. By ensuring that both roboticists and security researchers working on a project have a common, consistent and easily reproducible development environment, alurity aims to facilitate the cybersecurity research and the collaboration across teams.
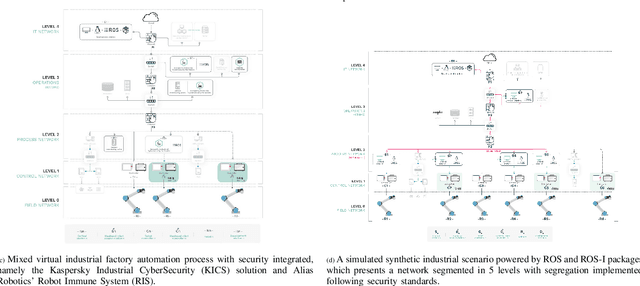
Can ROS be used securely in industry? Red teaming ROS-Industrial
Sep 17, 2020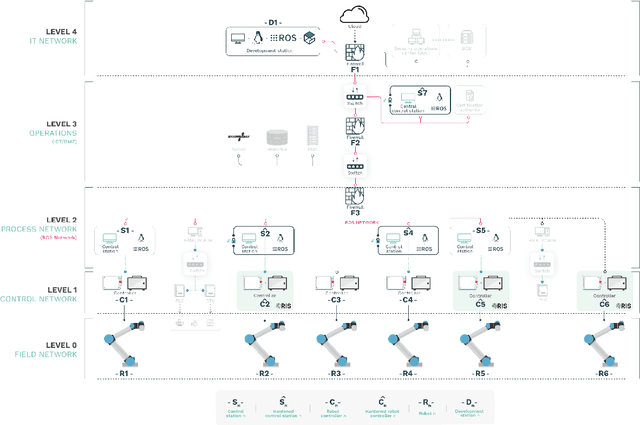
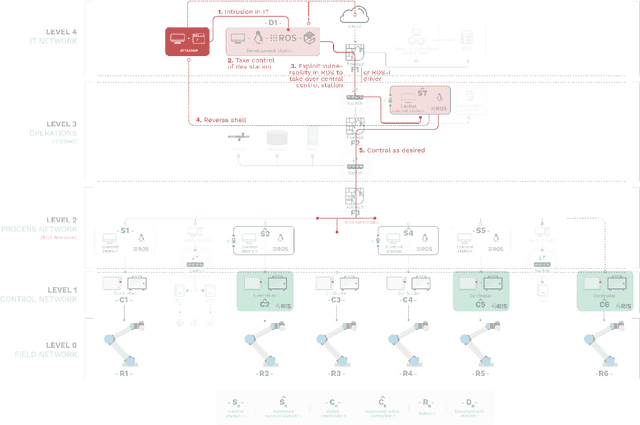
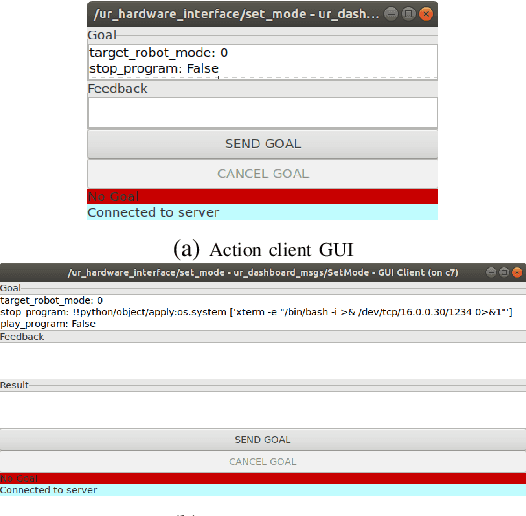
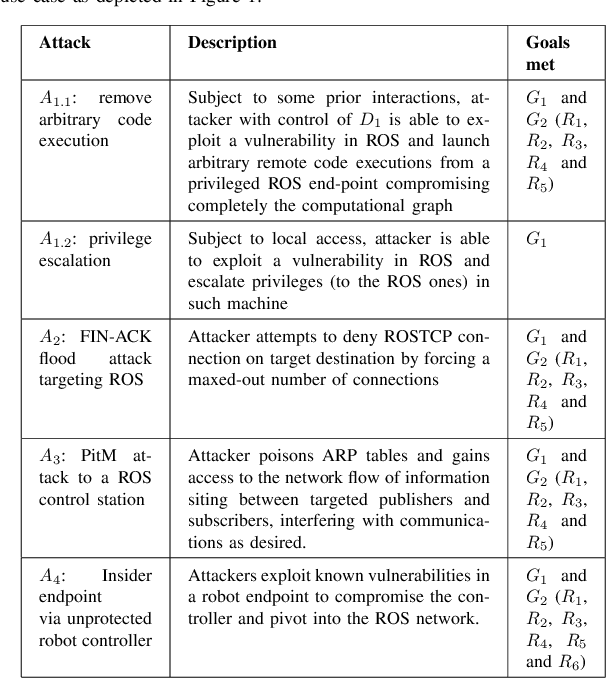
With its growing use in industry, ROS is rapidly becoming a standard in robotics. While developments in ROS 2 show promise, the slow adoption cycles in industry will push widespread ROS 2 industrial adoption years from now. ROS will prevail in the meantime which raises the question: can ROS be used securely for industrial use cases even though its origins didn't consider it? The present study analyzes this question experimentally by performing a targeted offensive security exercise in a synthetic industrial use case involving ROS-Industrial and ROS packages. Our exercise results in four groups of attacks which manage to compromise the ROS computational graph, and all except one take control of most robotic endpoints at desire. To the best of our knowledge and given our setup, results do not favour the secure use of ROS in industry today, however, we managed to confirm that the security of certain robotic endpoints hold and remain optimistic about securing ROS industrial deployments.