 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArchGym: An Open-Source Gymnasium for Machine Learning Assisted Architecture Design
Jun 15, 2023Machine learning is a prevalent approach to tame the complexity of design space exploration for domain-specific architectures. Using ML for design space exploration poses challenges. First, it's not straightforward to identify the suitable algorithm from an increasing pool of ML methods. Second, assessing the trade-offs between performance and sample efficiency across these methods is inconclusive. Finally, lack of a holistic framework for fair, reproducible, and objective comparison across these methods hinders progress of adopting ML-aided architecture design space exploration and impedes creating repeatable artifacts. To mitigate these challenges, we introduce ArchGym, an open-source gym and easy-to-extend framework that connects diverse search algorithms to architecture simulators. To demonstrate utility, we evaluate ArchGym across multiple vanilla and domain-specific search algorithms in designing custom memory controller, deep neural network accelerators, and custom SoC for AR/VR workloads, encompassing over 21K experiments. Results suggest that with unlimited samples, ML algorithms are equally favorable to meet user-defined target specification if hyperparameters are tuned; no solution is necessarily better than another (e.g., reinforcement learning vs. Bayesian methods). We coin the term hyperparameter lottery to describe the chance for a search algorithm to find an optimal design provided meticulously selected hyperparameters. The ease of data collection and aggregation in ArchGym facilitates research in ML-aided architecture design space exploration. As a case study, we show this advantage by developing a proxy cost model with an RMSE of 0.61% that offers a 2,000-fold reduction in simulation time. Code and data for ArchGym is available at https://bit.ly/ArchGym.
RoboRun: A Robot Runtime to Exploit Spatial Heterogeneity
Aug 30, 2021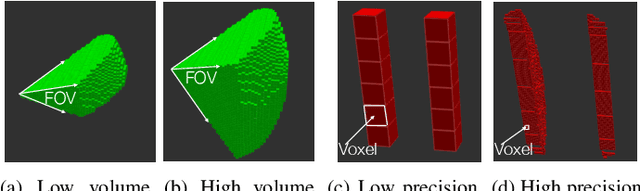
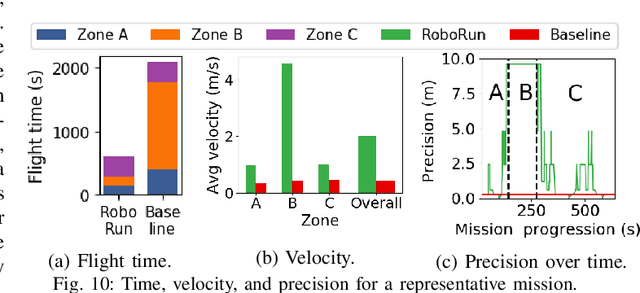
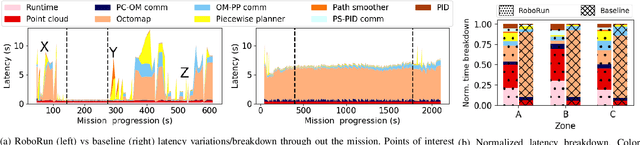
The limited onboard energy of autonomous mobile robots poses a tremendous challenge for practical deployment. Hence, efficient computing solutions are imperative. A crucial shortcoming of state-of-the-art computing solutions is that they ignore the robot's operating environment heterogeneity and make static, worst-case assumptions. As this heterogeneity impacts the system's computing payload, an optimal system must dynamically capture these changes in the environment and adjust its computational resources accordingly. This paper introduces RoboRun, a mobile-robot runtime that dynamically exploits the compute-environment synergy to improve performance and energy. We implement RoboRun in the Robot Operating System (ROS) and evaluate it on autonomous drones. We compare RoboRun against a state-of-the-art static design and show 4.5X and 4X improvements in mission time and energy, respectively, as well as a 36% reduction in CPU utilization.
One Size Does Not Fit All: Quantifying and Exposing the Accuracy-Latency Trade-off in Machine Learning Cloud Service APIs via Tolerance Tiers
Jun 26, 2019
Today's cloud service architectures follow a "one size fits all" deployment strategy where the same service version instantiation is provided to the end users. However, consumers are broad and different applications have different accuracy and responsiveness requirements, which as we demonstrate renders the "one size fits all" approach inefficient in practice. We use a production-grade speech recognition engine, which serves several thousands of users, and an open source computer vision based system, to explain our point. To overcome the limitations of the "one size fits all" approach, we recommend Tolerance Tiers where each MLaaS tier exposes an accuracy/responsiveness characteristic, and consumers can programmatically select a tier. We evaluate our proposal on the CPU-based automatic speech recognition (ASR) engine and cutting-edge neural networks for image classification deployed on both CPUs and GPUs. The results show that our proposed approach provides an MLaaS cloud service architecture that can be tuned by the end API user or consumer to outperform the conventional "one size fits all" approach.
The Role of Compute in Autonomous Aerial Vehicles
Jun 24, 2019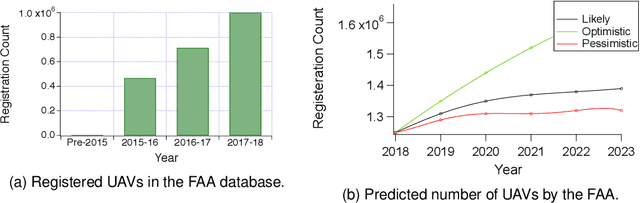
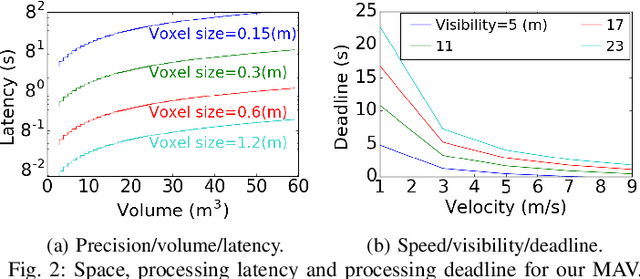
Autonomous-mobile cyber-physical machines are part of our future. Specifically, unmanned-aerial-vehicles have seen a resurgence in activity with use-cases such as package delivery. These systems face many challenges such as their low-endurance caused by limited onboard-energy, hence, improving the mission-time and energy are of importance. Such improvements traditionally are delivered through better algorithms. But our premise is that more powerful and efficient onboard-compute should also address the problem. This paper investigates how the compute subsystem, in a cyber-physical mobile machine, such as a Micro Aerial Vehicle, impacts mission-time and energy. Specifically, we pose the question as what is the role of computing for cyber-physical mobile robots? We show that compute and motion are tightly intertwined, hence a close examination of cyber and physical processes and their impact on one another is necessary. We show different impact paths through which compute impacts mission-metrics and examine them using analytical models, simulation, and end-to-end benchmarking. To enable similar studies, we open sourced MAVBench, our tool-set consisting of a closed-loop simulator and a benchmark suite. Our investigations show cyber-physical co-design, a methodology where robot's cyber and physical processes/quantities are developed with one another consideration, similar to hardware-software co-design, is necessary for optimal robot design.
MAVBench: Micro Aerial Vehicle Benchmarking
Jun 01, 2019
Unmanned Aerial Vehicles (UAVs) are getting closer to becoming ubiquitous in everyday life. Among them, Micro Aerial Vehicles (MAVs) have seen an outburst of attention recently, specifically in the area with a demand for autonomy. A key challenge standing in the way of making MAVs autonomous is that researchers lack the comprehensive understanding of how performance, power, and computational bottlenecks affect MAV applications. MAVs must operate under a stringent power budget, which severely limits their flight endurance time. As such, there is a need for new tools, benchmarks, and methodologies to foster the systematic development of autonomous MAVs. In this paper, we introduce the `MAVBench' framework which consists of a closed-loop simulator and an end-to-end application benchmark suite. A closed-loop simulation platform is needed to probe and understand the intra-system (application data flow) and inter-system (system and environment) interactions in MAV applications to pinpoint bottlenecks and identify opportunities for hardware and software co-design and optimization. In addition to the simulator, MAVBench provides a benchmark suite, the first of its kind, consisting of a variety of MAV applications designed to enable computer architects to perform characterization and develop future aerial computing systems. Using our open source, end-to-end experimental platform, we uncover a hidden, and thus far unexpected compute to total system energy relationship in MAVs. Furthermore, we explore the role of compute by presenting three case studies targeting performance, energy and reliability. These studies confirm that an efficient system design can improve MAV's battery consumption by up to 1.8X.