 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMEAL: A Benchmark for Continual Multi-Agent Reinforcement Learning
Jun 17, 2025Benchmarks play a crucial role in the development and analysis of reinforcement learning (RL) algorithms, with environment availability strongly impacting research. One particularly underexplored intersection is continual learning (CL) in cooperative multi-agent settings. To remedy this, we introduce MEAL (Multi-agent Environments for Adaptive Learning), the first benchmark tailored for continual multi-agent reinforcement learning (CMARL). Existing CL benchmarks run environments on the CPU, leading to computational bottlenecks and limiting the length of task sequences. MEAL leverages JAX for GPU acceleration, enabling continual learning across sequences of 100 tasks on a standard desktop PC in a few hours. We show that naively combining popular CL and MARL methods yields strong performance on simple environments, but fails to scale to more complex settings requiring sustained coordination and adaptation. Our ablation study identifies architectural and algorithmic features critical for CMARL on MEAL.
Studying the Interplay Between the Actor and Critic Representations in Reinforcement Learning
Mar 08, 2025
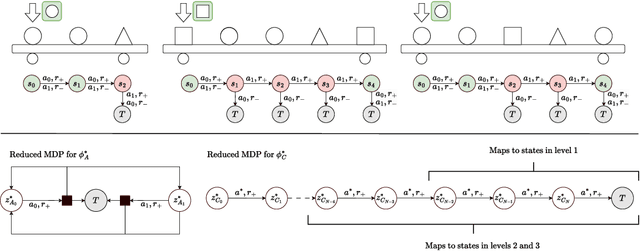

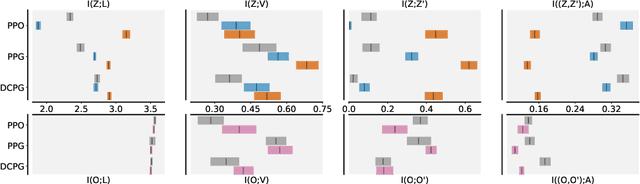
Extracting relevant information from a stream of high-dimensional observations is a central challenge for deep reinforcement learning agents. Actor-critic algorithms add further complexity to this challenge, as it is often unclear whether the same information will be relevant to both the actor and the critic. To this end, we here explore the principles that underlie effective representations for the actor and for the critic in on-policy algorithms. We focus our study on understanding whether the actor and critic will benefit from separate, rather than shared, representations. Our primary finding is that when separated, the representations for the actor and critic systematically specialise in extracting different types of information from the environment -- the actor's representation tends to focus on action-relevant information, while the critic's representation specialises in encoding value and dynamics information. We conduct a rigourous empirical study to understand how different representation learning approaches affect the actor and critic's specialisations and their downstream performance, in terms of sample efficiency and generation capabilities. Finally, we discover that a separated critic plays an important role in exploration and data collection during training. Our code, trained models and data are accessible at https://github.com/francelico/deac-rep.
ICED: Zero-Shot Transfer in Reinforcement Learning via In-Context Environment Design
Feb 05, 2024Autonomous agents trained using deep reinforcement learning (RL) often lack the ability to successfully generalise to new environments, even when they share characteristics with the environments they have encountered during training. In this work, we investigate how the sampling of individual environment instances, or levels, affects the zero-shot generalisation (ZSG) ability of RL agents. We discover that, for deep actor-critic architectures sharing their base layers, prioritising levels according to their value loss minimises the mutual information between the agent's internal representation and the set of training levels in the generated training data. This provides a novel theoretical justification for the implicit regularisation achieved by certain adaptive sampling strategies. We then turn our attention to unsupervised environment design (UED) methods, which have more control over the data generation mechanism. We find that existing UED methods can significantly shift the training distribution, which translates to low ZSG performance. To prevent both overfitting and distributional shift, we introduce in-context environment design (ICED). ICED generates levels using a variational autoencoder trained over an initial set of level parameters, reducing distributional shift, and achieves significant improvements in ZSG over adaptive level sampling strategies and UED methods.
How the level sampling process impacts zero-shot generalisation in deep reinforcement learning
Oct 05, 2023



A key limitation preventing the wider adoption of autonomous agents trained via deep reinforcement learning (RL) is their limited ability to generalise to new environments, even when these share similar characteristics with environments encountered during training. In this work, we investigate how a non-uniform sampling strategy of individual environment instances, or levels, affects the zero-shot generalisation (ZSG) ability of RL agents, considering two failure modes: overfitting and over-generalisation. As a first step, we measure the mutual information (MI) between the agent's internal representation and the set of training levels, which we find to be well-correlated to instance overfitting. In contrast to uniform sampling, adaptive sampling strategies prioritising levels based on their value loss are more effective at maintaining lower MI, which provides a novel theoretical justification for this class of techniques. We then turn our attention to unsupervised environment design (UED) methods, which adaptively generate new training levels and minimise MI more effectively than methods sampling from a fixed set. However, we find UED methods significantly shift the training distribution, resulting in over-generalisation and worse ZSG performance over the distribution of interest. To prevent both instance overfitting and over-generalisation, we introduce self-supervised environment design (SSED). SSED generates levels using a variational autoencoder, effectively reducing MI while minimising the shift with the distribution of interest, and leads to statistically significant improvements in ZSG over fixed-set level sampling strategies and UED methods.
Deep Reinforcement Learning for Multi-Agent Interaction
Aug 02, 2022The development of autonomous agents which can interact with other agents to accomplish a given task is a core area of research in artificial intelligence and machine learning. Towards this goal, the Autonomous Agents Research Group develops novel machine learning algorithms for autonomous systems control, with a specific focus on deep reinforcement learning and multi-agent reinforcement learning. Research problems include scalable learning of coordinated agent policies and inter-agent communication; reasoning about the behaviours, goals, and composition of other agents from limited observations; and sample-efficient learning based on intrinsic motivation, curriculum learning, causal inference, and representation learning. This article provides a broad overview of the ongoing research portfolio of the group and discusses open problems for future directions.