 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Multi-Agent Interaction
Aug 02, 2022The development of autonomous agents which can interact with other agents to accomplish a given task is a core area of research in artificial intelligence and machine learning. Towards this goal, the Autonomous Agents Research Group develops novel machine learning algorithms for autonomous systems control, with a specific focus on deep reinforcement learning and multi-agent reinforcement learning. Research problems include scalable learning of coordinated agent policies and inter-agent communication; reasoning about the behaviours, goals, and composition of other agents from limited observations; and sample-efficient learning based on intrinsic motivation, curriculum learning, causal inference, and representation learning. This article provides a broad overview of the ongoing research portfolio of the group and discusses open problems for future directions.
Verifiable Goal Recognition for Autonomous Driving with Occlusions
Jun 28, 2022
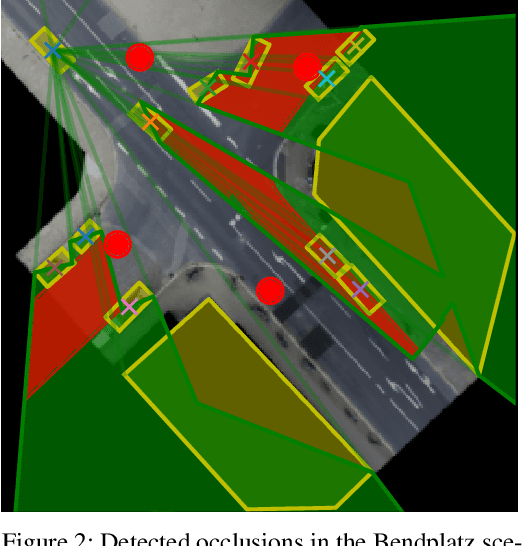
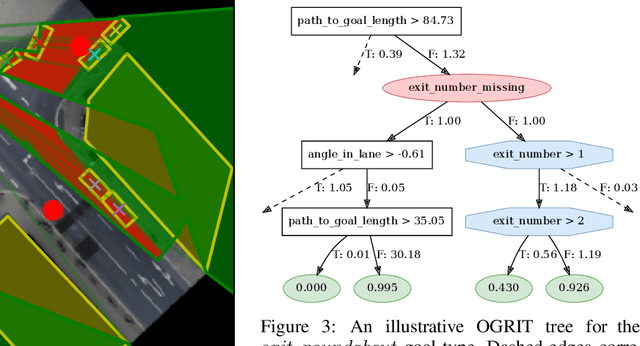
When used in autonomous driving, goal recognition allows the future behaviour of other vehicles to be more accurately predicted. A recent goal recognition method for autonomous vehicles, GRIT, has been shown to be fast, accurate, interpretable and verifiable. In autonomous driving, vehicles can encounter novel scenarios that were unseen during training, and the environment is partially observable due to occlusions. However, GRIT can only operate in fixed frame scenarios, with full observability. We present a novel goal recognition method named Goal Recognition with Interpretable Trees under Occlusion (OGRIT), which solves these shortcomings of GRIT. We demonstrate that OGRIT can generalise between different scenarios and handle missing data due to occlusions, while still being fast, accurate, interpretable and verifiable.
GRIT: Verifiable Goal Recognition for Autonomous Driving using Decision Trees
Mar 10, 2021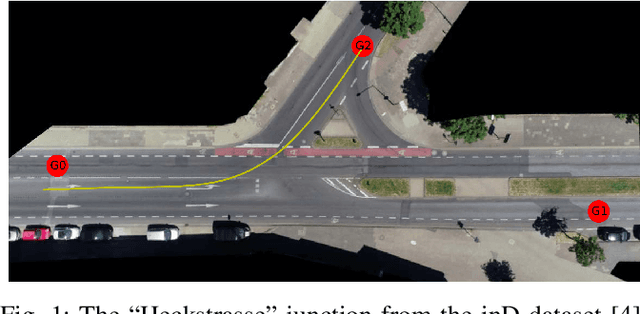
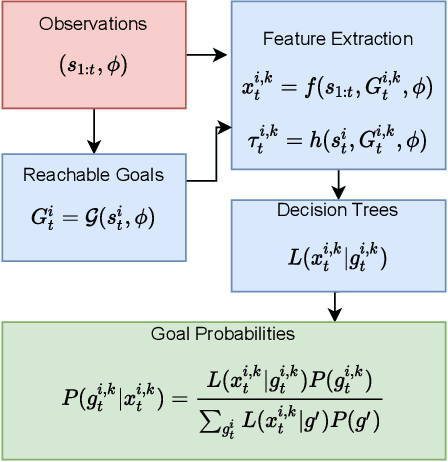
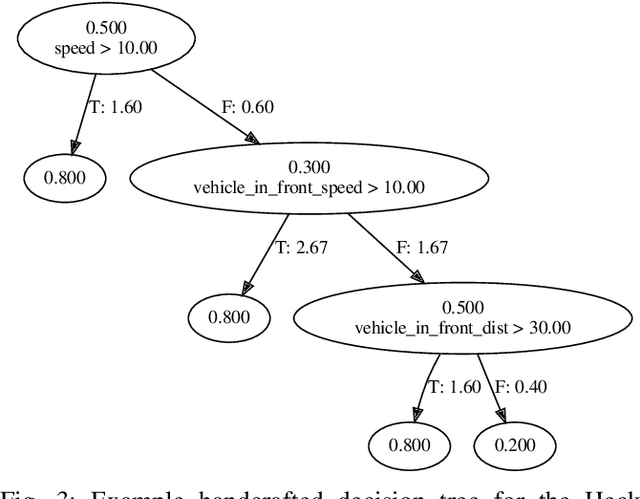

It is useful for autonomous vehicles to have the ability to infer the goals of other vehicles (goal recognition), in order to safely interact with other vehicles and predict their future trajectories. Goal recognition methods must be fast to run in real time and make accurate inferences. As autonomous driving is safety-critical, it is important to have methods which are human interpretable and for which safety can be formally verified. Existing goal recognition methods for autonomous vehicles fail to satisfy all four objectives of being fast, accurate, interpretable and verifiable. We propose Goal Recognition with Interpretable Trees (GRIT), a goal recognition system for autonomous vehicles which achieves these objectives. GRIT makes use of decision trees trained on vehicle trajectory data. Evaluation on two vehicle trajectory datasets demonstrates the inference speed and accuracy of GRIT compared to an ablation and two deep learning baselines. We show that the learned trees are human interpretable and demonstrate how properties of GRIT can be formally verified using an SMT solver.
Integrating Planning and Interpretable Goal Recognition for Autonomous Driving
Feb 06, 2020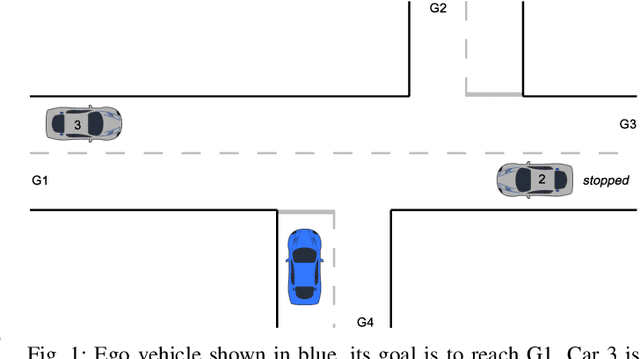
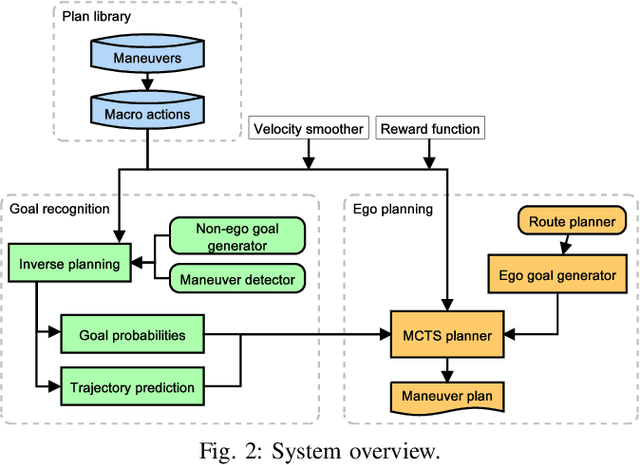

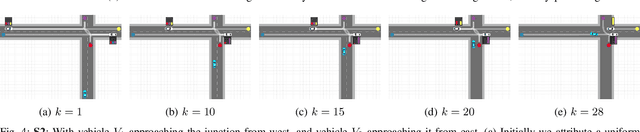
The ability to predict the intentions and driving trajectories of other vehicles is a key problem for autonomous driving. We propose an integrated planning and prediction system which leverages the computational benefit of using a finite space of maneuvers, and extend the approach to planning and prediction of sequences (plans) of maneuvers via rational inverse planning to recognise the goals of other vehicles. Goal recognition informs a Monte Carlo Tree Search (MCTS) algorithm to plan optimal maneuvers for the ego vehicle. Inverse planning and MCTS utilise a shared set of defined maneuvers to construct plans which are explainable by means of rationality, i.e. plans are optimal in given metrics. Evaluation in simulations of four urban driving scenarios demonstrate the system's ability to robustly recognise the goals of other vehicles while generating near-optimal plans. In each scenario we extract intuitive explanations for the recognised goals and maneuver predictions which justify the system's decisions.
Non-Intrusive Load Monitoring with Fully Convolutional Networks
Dec 10, 2018

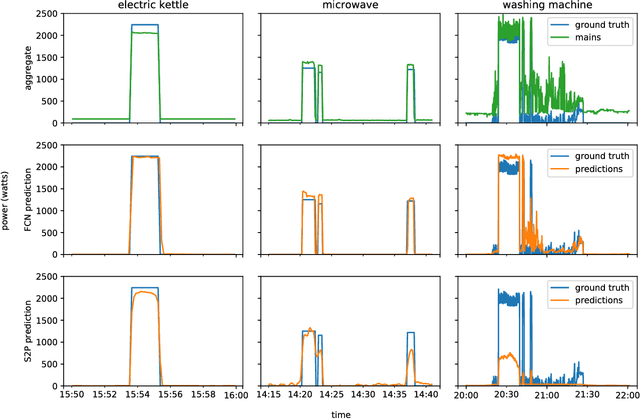

Non-intrusive load monitoring or energy disaggregation involves estimating the power consumption of individual appliances from measurements of the total power consumption of a home. Deep neural networks have been shown to be effective for energy disaggregation. In this work, we present a deep neural network architecture which achieves state of the art disaggregation performance with substantially improved computational efficiency, reducing model training time by a factor of 32 and prediction time by a factor of 43. This improvement in efficiency could be especially useful for applications where disaggregation must be performed in home on lower power devices, or for research experiments which involve training a large number of models.