 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlash: Fast and Light Motion Prediction for Autonomous Driving with Bayesian Inverse Planning and Learned Motion Profiles
Mar 15, 2022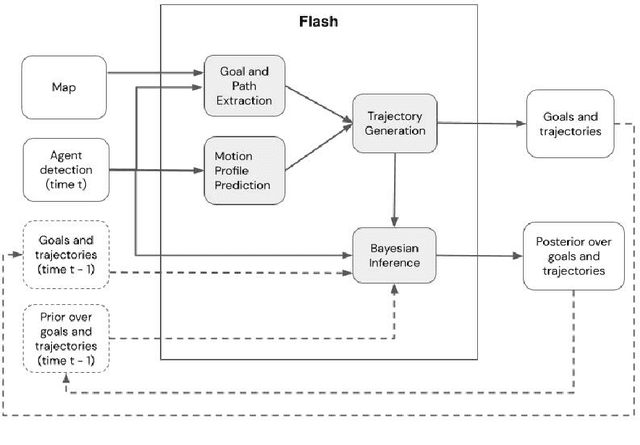
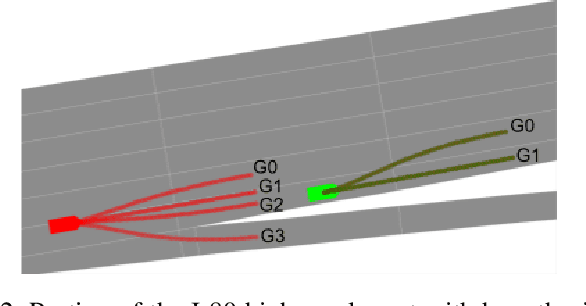
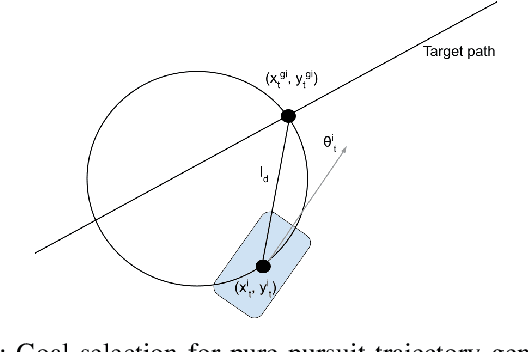
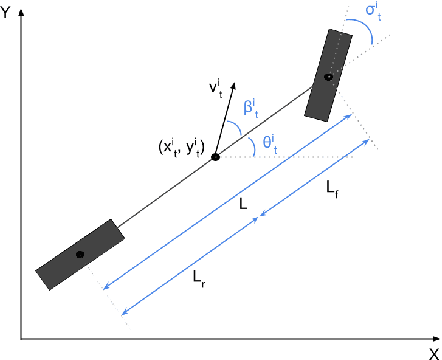
Motion prediction of road users in traffic scenes is critical for autonomous driving systems that must take safe and robust decisions in complex dynamic environments. We present a novel motion prediction system for autonomous driving. Our system is based on the Bayesian inverse planning framework, which efficiently orchestrates map-based goal extraction, a classical control-based trajectory generator and an ensemble of light-weight neural networks specialised in motion profile prediction. In contrast to many alternative methods, this modularity helps isolate performance factors and better interpret results, without compromising performance. This system addresses multiple aspects of interest, namely multi-modality, motion profile uncertainty and trajectory physical feasibility. We report on several experiments with the popular highway dataset NGSIM, demonstrating state-of-the-art performance in terms of trajectory error. We also perform a detailed analysis of our system's components, along with experiments that stratify the data based on behaviours, such as change lane versus follow lane, to provide insights into the challenges in this domain. Finally, we present a qualitative analysis to show other benefits of our approach, such as the ability to interpret the outputs.
Interpretable Goal Recognition in the Presence of Occluded Factors for Autonomous Vehicles
Aug 05, 2021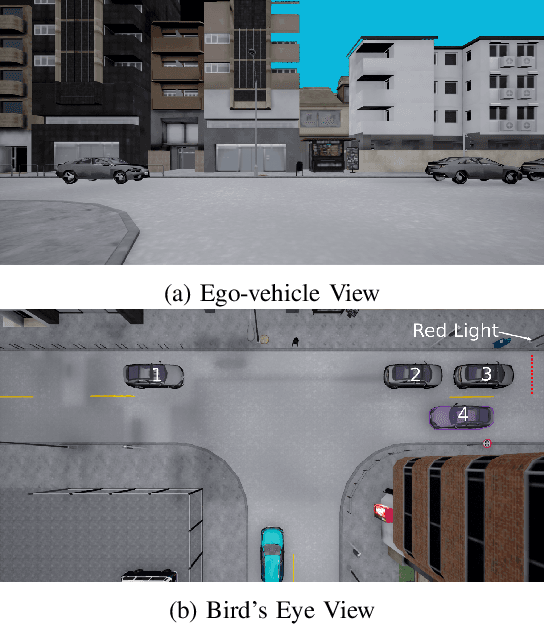
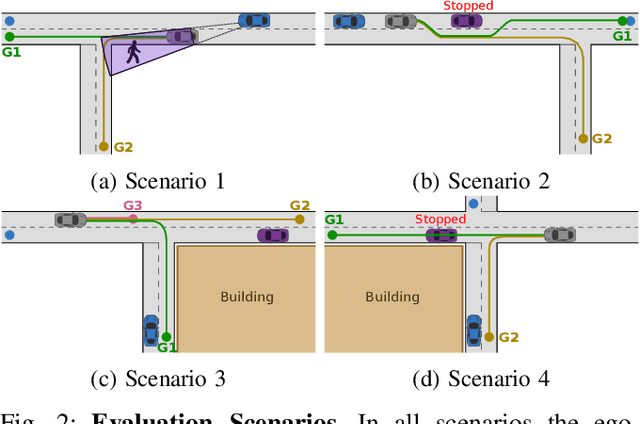
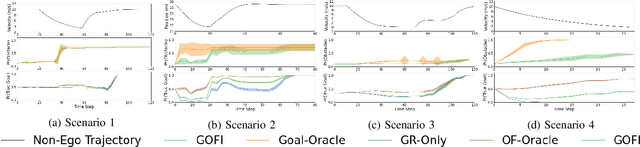
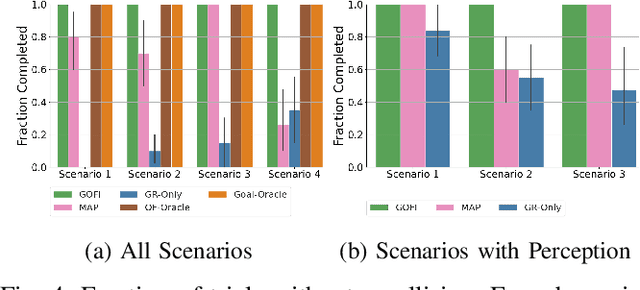
Recognising the goals or intentions of observed vehicles is a key step towards predicting the long-term future behaviour of other agents in an autonomous driving scenario. When there are unseen obstacles or occluded vehicles in a scenario, goal recognition may be confounded by the effects of these unseen entities on the behaviour of observed vehicles. Existing prediction algorithms that assume rational behaviour with respect to inferred goals may fail to make accurate long-horizon predictions because they ignore the possibility that the behaviour is influenced by such unseen entities. We introduce the Goal and Occluded Factor Inference (GOFI) algorithm which bases inference on inverse-planning to jointly infer a probabilistic belief over goals and potential occluded factors. We then show how these beliefs can be integrated into Monte Carlo Tree Search (MCTS). We demonstrate that jointly inferring goals and occluded factors leads to more accurate beliefs with respect to the true world state and allows an agent to safely navigate several scenarios where other baselines take unsafe actions leading to collisions.
Integrating Planning and Interpretable Goal Recognition for Autonomous Driving
Feb 06, 2020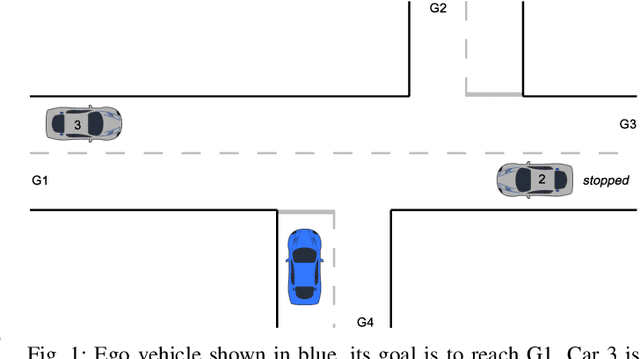
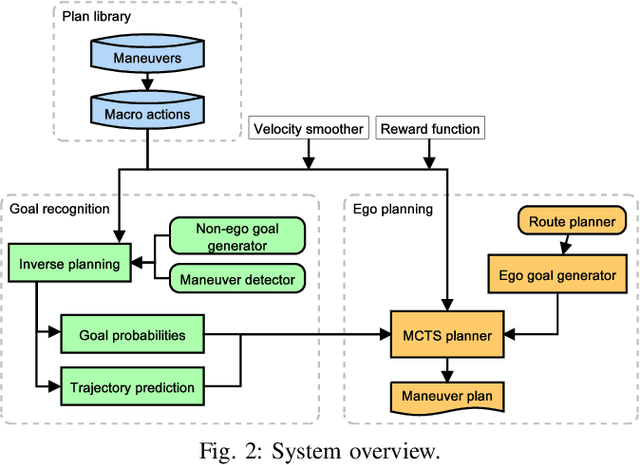

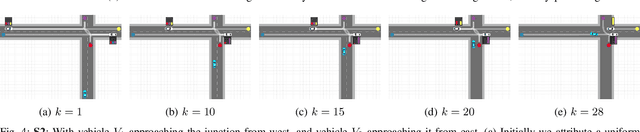
The ability to predict the intentions and driving trajectories of other vehicles is a key problem for autonomous driving. We propose an integrated planning and prediction system which leverages the computational benefit of using a finite space of maneuvers, and extend the approach to planning and prediction of sequences (plans) of maneuvers via rational inverse planning to recognise the goals of other vehicles. Goal recognition informs a Monte Carlo Tree Search (MCTS) algorithm to plan optimal maneuvers for the ego vehicle. Inverse planning and MCTS utilise a shared set of defined maneuvers to construct plans which are explainable by means of rationality, i.e. plans are optimal in given metrics. Evaluation in simulations of four urban driving scenarios demonstrate the system's ability to robustly recognise the goals of other vehicles while generating near-optimal plans. In each scenario we extract intuitive explanations for the recognised goals and maneuver predictions which justify the system's decisions.
Talking to myself: self-dialogues as data for conversational agents
Sep 19, 2018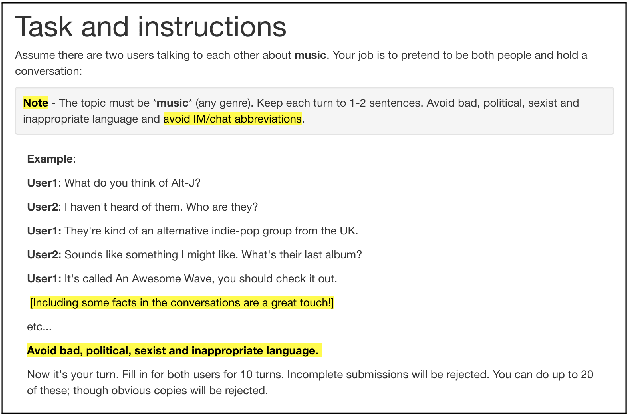
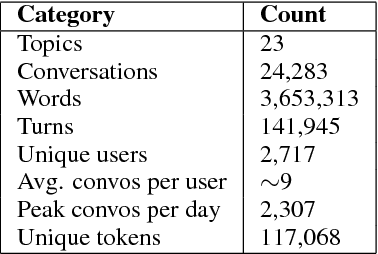
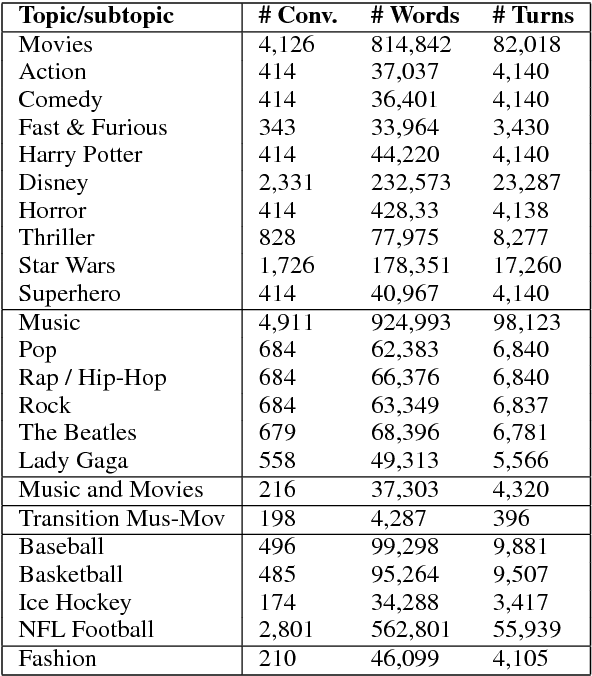
Conversational agents are gaining popularity with the increasing ubiquity of smart devices. However, training agents in a data driven manner is challenging due to a lack of suitable corpora. This paper presents a novel method for gathering topical, unstructured conversational data in an efficient way: self-dialogues through crowd-sourcing. Alongside this paper, we include a corpus of 3.6 million words across 23 topics. We argue the utility of the corpus by comparing self-dialogues with standard two-party conversations as well as data from other corpora.
Edina: Building an Open Domain Socialbot with Self-dialogues
Sep 28, 2017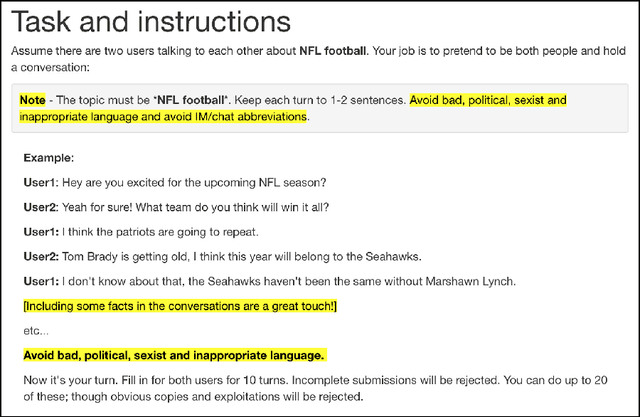
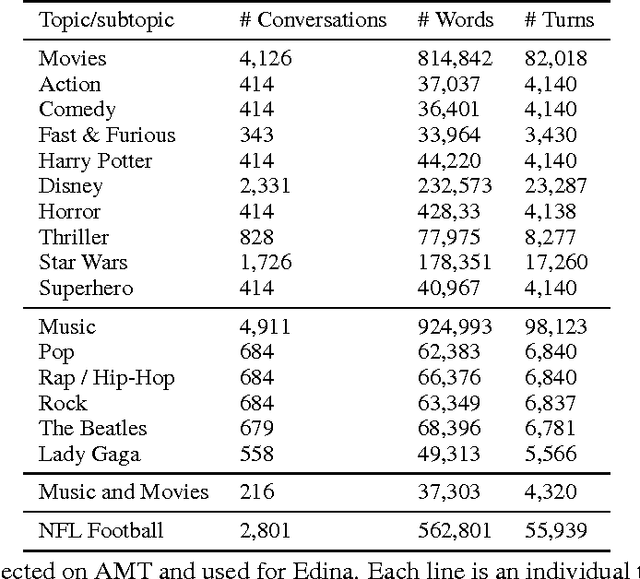
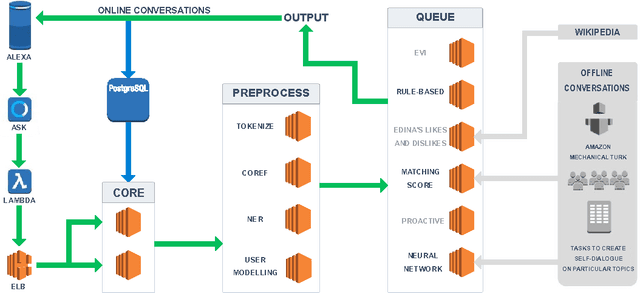

We present Edina, the University of Edinburgh's social bot for the Amazon Alexa Prize competition. Edina is a conversational agent whose responses utilize data harvested from Amazon Mechanical Turk (AMT) through an innovative new technique we call self-dialogues. These are conversations in which a single AMT Worker plays both participants in a dialogue. Such dialogues are surprisingly natural, efficient to collect and reflective of relevant and/or trending topics. These self-dialogues provide training data for a generative neural network as well as a basis for soft rules used by a matching score component. Each match of a soft rule against a user utterance is associated with a confidence score which we show is strongly indicative of reply quality, allowing this component to self-censor and be effectively integrated with other components. Edina's full architecture features a rule-based system backing off to a matching score, backing off to a generative neural network. Our hybrid data-driven methodology thus addresses both coverage limitations of a strictly rule-based approach and the lack of guarantees of a strictly machine-learning approach.