 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Goal Recognition in the Presence of Occluded Factors for Autonomous Vehicles
Paper and Code
Aug 05, 2021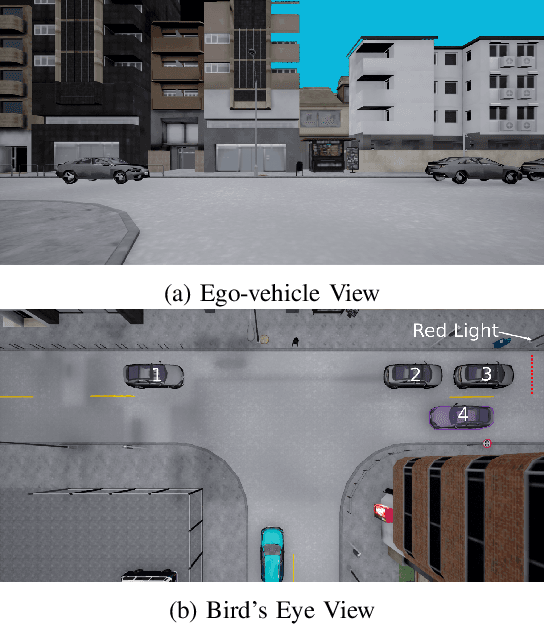
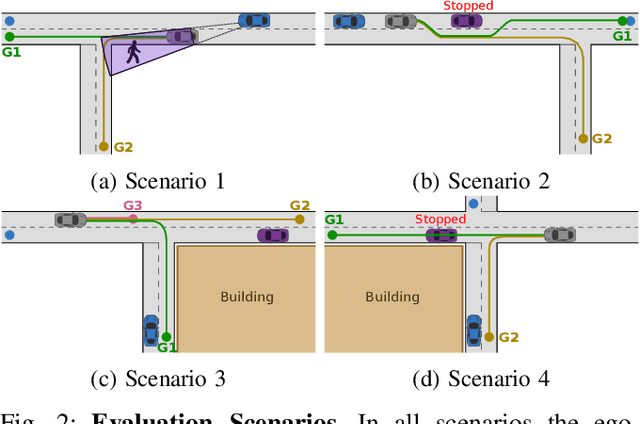
Recognising the goals or intentions of observed vehicles is a key step towards predicting the long-term future behaviour of other agents in an autonomous driving scenario. When there are unseen obstacles or occluded vehicles in a scenario, goal recognition may be confounded by the effects of these unseen entities on the behaviour of observed vehicles. Existing prediction algorithms that assume rational behaviour with respect to inferred goals may fail to make accurate long-horizon predictions because they ignore the possibility that the behaviour is influenced by such unseen entities. We introduce the Goal and Occluded Factor Inference (GOFI) algorithm which bases inference on inverse-planning to jointly infer a probabilistic belief over goals and potential occluded factors. We then show how these beliefs can be integrated into Monte Carlo Tree Search (MCTS). We demonstrate that jointly inferring goals and occluded factors leads to more accurate beliefs with respect to the true world state and allows an agent to safely navigate several scenarios where other baselines take unsafe actions leading to collisions.