 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantitative Analysis of Image Classification Techniques for Memory-Constrained Devices
May 11, 2020
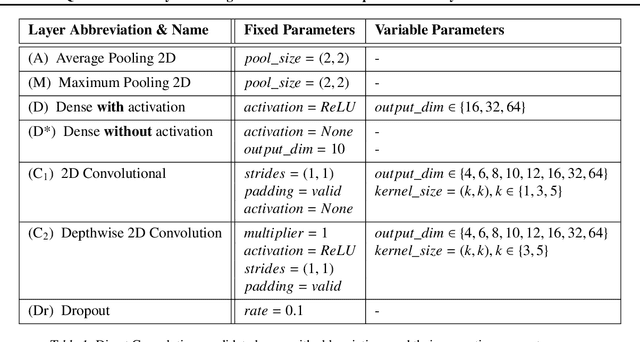
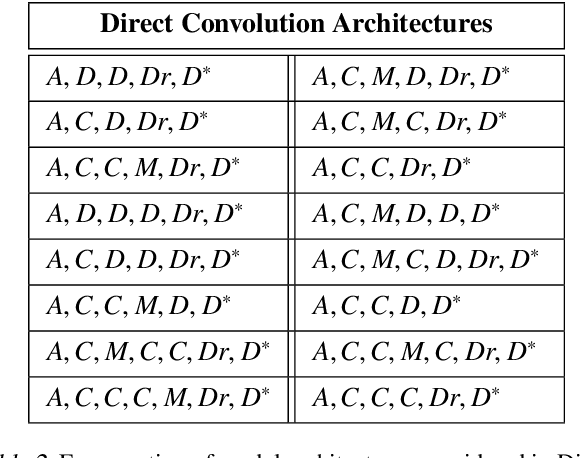
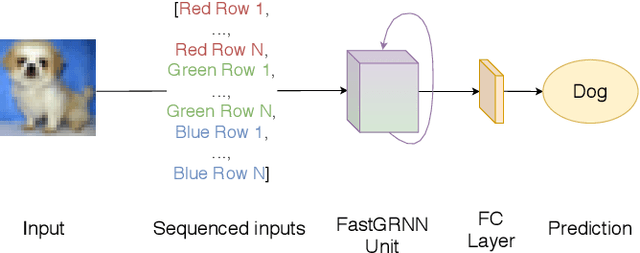
Convolutional Neural Networks, or CNNs, are undoubtedly the state of the art for image classification. However, they typically come with the cost of a large memory footprint. Recently, there has been significant progress in the field of image classification on memory-constrained devices, such as Arduino Unos, with novel contributions like the ProtoNN, Bonsai and FastGRNN models. These methods have been shown to perform excellently on tasks such as speech recognition or optical character recognition using MNIST, but their potential on more complex, multi-channel and multi-class image classification has yet to be determined. This paper presents a comprehensive analysis that shows that even in memory-constrained environments, CNNs implemented memory-optimally using Direct Convolutions outperform ProtoNN, Bonsai and FastGRNN models on 3-channel image classification using CIFAR-10. For our analysis, we propose new methods of adjusting the FastGRNN model to work with multi-channel images and then evaluate each algorithm with a memory size budget of 8KB, 16KB, 32KB, 64KB and 128KB to show quantitatively that CNNs are still state-of-the-art in image classification, even when memory size is constrained.
Integrating Planning and Interpretable Goal Recognition for Autonomous Driving
Feb 06, 2020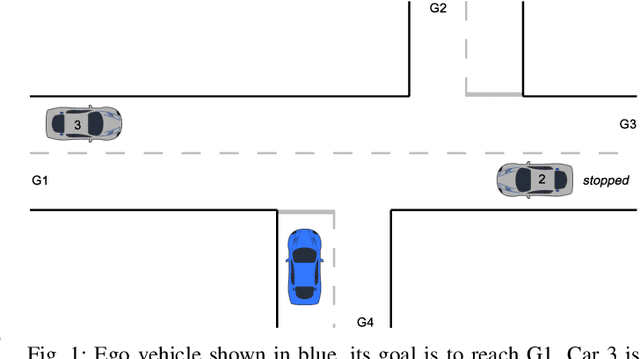
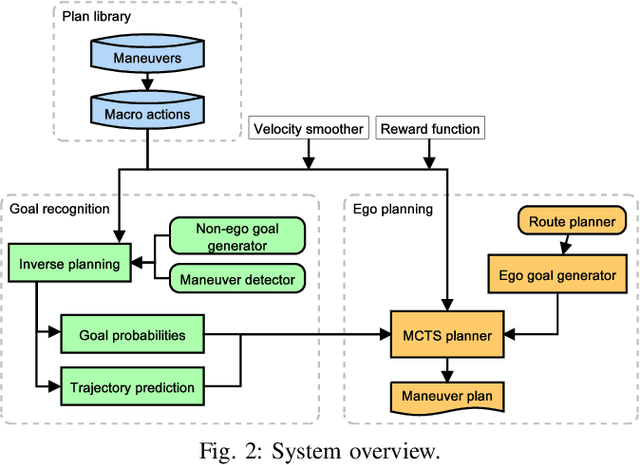

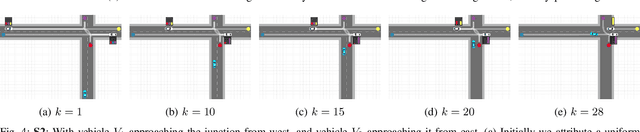
The ability to predict the intentions and driving trajectories of other vehicles is a key problem for autonomous driving. We propose an integrated planning and prediction system which leverages the computational benefit of using a finite space of maneuvers, and extend the approach to planning and prediction of sequences (plans) of maneuvers via rational inverse planning to recognise the goals of other vehicles. Goal recognition informs a Monte Carlo Tree Search (MCTS) algorithm to plan optimal maneuvers for the ego vehicle. Inverse planning and MCTS utilise a shared set of defined maneuvers to construct plans which are explainable by means of rationality, i.e. plans are optimal in given metrics. Evaluation in simulations of four urban driving scenarios demonstrate the system's ability to robustly recognise the goals of other vehicles while generating near-optimal plans. In each scenario we extract intuitive explanations for the recognised goals and maneuver predictions which justify the system's decisions.